(54) АВТООПЕРАТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс | 1981 |
|
SU1034892A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Автооператор | 1979 |
|
SU844218A1 |
| Устройство поштучной выдачи деталей на линию центров станка | 1981 |
|
SU952520A1 |
| Транспортная система гибкой автоматической линии | 1976 |
|
SU722731A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Автоматическая линия | 1975 |
|
SU547327A1 |
1
Изобретение относится к устройствам, устанавливаемым на металлорежущих станках для автоматизации загрузки и выгрузки деталей. ;
Известен автооператор, предназначенный для загрузки и выгрузки деталей при токарной обработке, содержащий механизм подачи и съема детали, связанный с силовым цилиндром, механизм сброса деталей, магазин с отсекателем и лоток 1.
Недостатком известного автооператора является компоновка средств подачи и съема детали непосредственно в рабочей зоне станка, что вызывает их забивание стружкой, усложняет доступ, наладку и обслуживание автооператора.
Известен также автооператор с верхней трассой загрузки, содержащий основание, средство для подачи (отвода) деталей, например, подающий лоток, питатель, выполненный в виде силового цилиндра, на штоке которого смонтирован схват 2.
Недостатком этого автооператора является сложность конструкции автооператора и ненадежность его работы.
Цель изобретения - упрощение конструкции автооператора и повыщение надежности его работы.
Цель достигается тем, что автооператор снабжен установленным на основании дополнительным силовым цилиндром, ось которого расположена выше оси щпинделя станка, отсекателем и одной полупризмой с собачкой, смонтированными на штоке этого дополнительного силового цилиндра, а также второй полупризмой, установленной на подающем лотке.
0
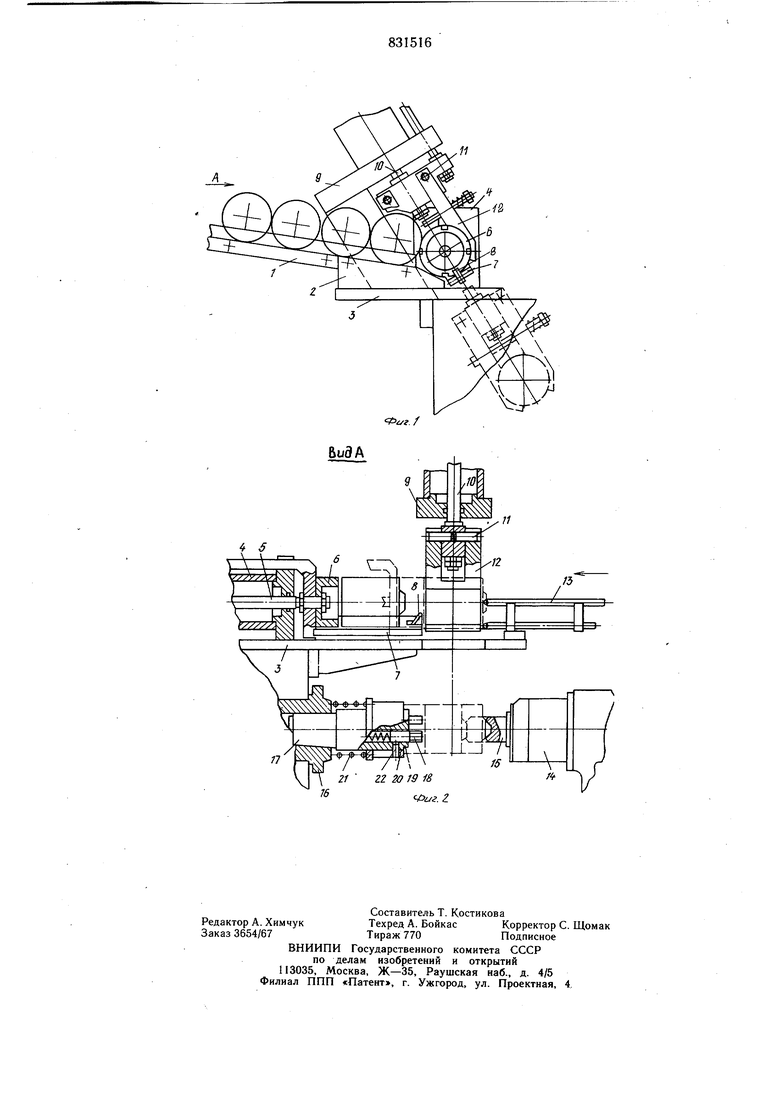
На фиг. 1 представлен предлагаемый автооператор, общий вид; на фиг. 2 - вид А на фиг. 1.
Автооператор содержит подающий лоток 1 с приемной полупризмой -2, соосно с которой на поверхности основания 3 установлен дополнительный силовой цилиндр 4, на штоке 5 которого закреплен отсекатель 6 и полупризма 7 для подачи-выталкивания обрабатываемых деталей, которая снабжена собачкой 8. На основании 3 закреплен выполненный в виде силового цилиндра питатель 9, на штоке 10 которого при помощи осей И смонтированы подпружиненные губки захвата 12, базирующая поверхность губок соосна оси дополнительного силового цилиндра 4, а шток 10 питателя 9 имеет возможность перемещения в направлении перпендикулярном оси шпинделя станка и пересекаюш,имся с этой осью.
На одной оси с дополнительным силовым цилиндром 4 и базируюш,ей поверхностью губок захвата 12, установлено приемное устройство 13. Обш,ая ось полупризмы 2 дополнительного силового цилиндра 4, базиРУЮШ.ИХ поверхностей губок захвата 12 и приемного устройства 13 расположена выше оси шпинделя станка.
На пиноли задней бабки 14 станка установлен поддерживающий центр 15, а на передней установочной поверхности шпинделя 16 станка закреплено установочное приспособление 17, которое снабжено подпру 1 ииепными поводками 18, расположенными соосно корпуса приспособления 19,. на наружной поверхности которого размещена втулка 20, перемещение втулки .обеспечивается пружиной 21 и ограничивается упором 22.
Автооператор работает следующим образом.
При ходе вперед корпуса силового цилиндра 4 обрабатываемая деталь, центрированная в призме, образованной полупризмой 2 и нолупризмой 7 для подачи-выталкивания торцом отсекателя 6 подается в центрнруюндие поверхности губок схвата 12, при этом остальной поток деталей, расположенных в подающем лотке 1 вплотную друг к другу, удерживается переферийной частью отсекателя 6.
После возврата корпуса силового цилиндра 4 в исходное положение освободившееся место в приемной призме занимает следующая деталь и одновременно питатель 9 подает зажатую в губках схвата 12 обрабатываемую деталь на линию центров станка (ось шпинделя станка), где поддерживающим центром 15 последняя устанавливается на базовую поверхность корпуса приспособления 19, сжимая при этом пружину 21.
Деталь в установочном приспособлении 17 закрепляется при помощи усилия поджима пиноли 14 задней бабки станка, а подпружиненные поводки 18 воспринимают крутящий момент от сил резания. В конце зажима включается возврат штока 10 питателя 9. В конце возврата штока Юв исходное положение включается цикл работы станка (происходит механическая обработка детали); в конце цикла включается подвод штока 10 питателя 9, в нижнем положении которого включается отвод пиноли 14, при этом под действием сжатой пружины 21 втулка 20 сталкива,ет обработанную деталь с установочного приспособления 17 и заталкивает ее в губки схвата 12. В конце хода пиноли включается движение штока 10 вверх, затем ход штока 5 силового цилиндра 4 вперед. Обработанная деталь выталкивается собачкой 8 в приемное устройство 13, а обрабатываемая подается в губки схвата 12.
Формула изобретения
Автооператор для загрузки деталей в шпиндель станка, содержащий основание, средство для подачи деталей, например, подающий лоток, питатель, выполненный в виде силового цилиндра, на штоке которого смонтирован схват, отличающийся тем, что, с целью упрощения конструкции и повыщения надежности, он снабжен установленным на основании дополнительным силовым цилиндром, ось которого расположена выше оси шпинделя станка, отсекателем и одной полупризмой с собачкой, смонтированными на штоке этого дополнительного силового цилиндра, а также второй полупризмой, установленной на подающем лотке. Источники информации, принятые во внимание при экспертизе
ВиЗА
11
/g
. /
. 2.
