1
(21)42«5764/25 28
(22)17.07.87
(46)15.07.89. Бюл. № 26
(71)Институт пробле.м прочности АН УС(,Р
(72)Г. А. Г огоии, Ю. А. Кузема и В.В. Кутняк
(53) 62().| 78.38(()88.8) (5Н) Авторское свилетельство (,(,С Р ,у 781676, К.1. G 01 . 3/18, 1979. Авторское свидетельство ССХЛ Л1 485354, к,1. С 01 N 3/18, 1 Ж8. (Г,4| УСТАНОВКА ДЛЯ ИСНЫТАННЯ ОШ АЗНОВ НА ИЗГИБ 1ПП1 ВЫСОКИ.Х TH.VUIF.PATYPAX
(57) Нзобрстеиие oi носится к ис:11 1татс, ной гс.чникс. Цель ичоб)етения уменынс ние г;;ба)итон ус1анонки. ciaiKJBKa c.i,icp /киг сганин, УСТУПОВ, lenHbie на ней пет. с опорами и силоно.(будите. . :- згрузочное сгрой т о и среде ио его /|е 1еме1ненин i. 11рИ1(()Д(.).м. 3ai py:-iO4H()e устройство вь.но,:- lifiio в вн.те (ак)ен,тенных на станине п;ь |)а. 1,ел1;но одна друюй опорной и.читы 8, про.межугочной плиты 10, ,1 13 и нпи- жнмной 11.1ИТ1,1 12. На оно)нои и иромежу- гочной п, |ита. 8 и 11)
которы.ч нар;;, 1лельна оси опор 3, а на раме I. и ,ipoMe/K гочной гь ипе 10 - пазы 15, пс1. коп) перпендикулярна оси опор 3. И iia.;;i. раз.мепн ны 1париков1 1е направ,1яю- jiiic И) и 17, а между рамой 13 и прижи.мной П.1ИГОЙ 12 и1ар Иковый сепаратор 18. Средство перемещения вьиклтнено в виде кулачка 24, ьзаим(действуюик го с новер.хностью )i I,) II .iaKpeiKicH ного на валу 23 адект- ролиигателя 22. На раме 1,3 закреп.лена ri,aac- гина 2,т с за.хватом 26, а на станине закреп- .leuLi нлпранляюшие 21, соосные онора% . и .;1ссет;1 О 1ля образц()в 4. При вра цении ку. ьач ка 24 )ама 13 совер иает возвратно- НОС1Л 11агел1-ное движение по направляю- ll:il 1 п 17. При этом за.хзат 26 изв,1екает
из кассеты
пластина zn
с. к доват1мьно переметает н.х по иаправ. I1UIM 21 и нанраилении опор 3 с niaroM, опре- дс, 1яем1з1м размерами CTOJIOH рамы 13 и ку- :ачка 24, то оГн-снечииаьд уменьшение га- ба:чгк)в установки. Иосле установки образна 4 на опоры 3 вк.-1Юча1(.)т силовозбудитель. рап)у|нак)т образен 4 и повторяют iuiK, i ис- iibiiaiun i, переметая последующие образ- (. . ф-. 1Ы, 4 и,;|.
iD
(Л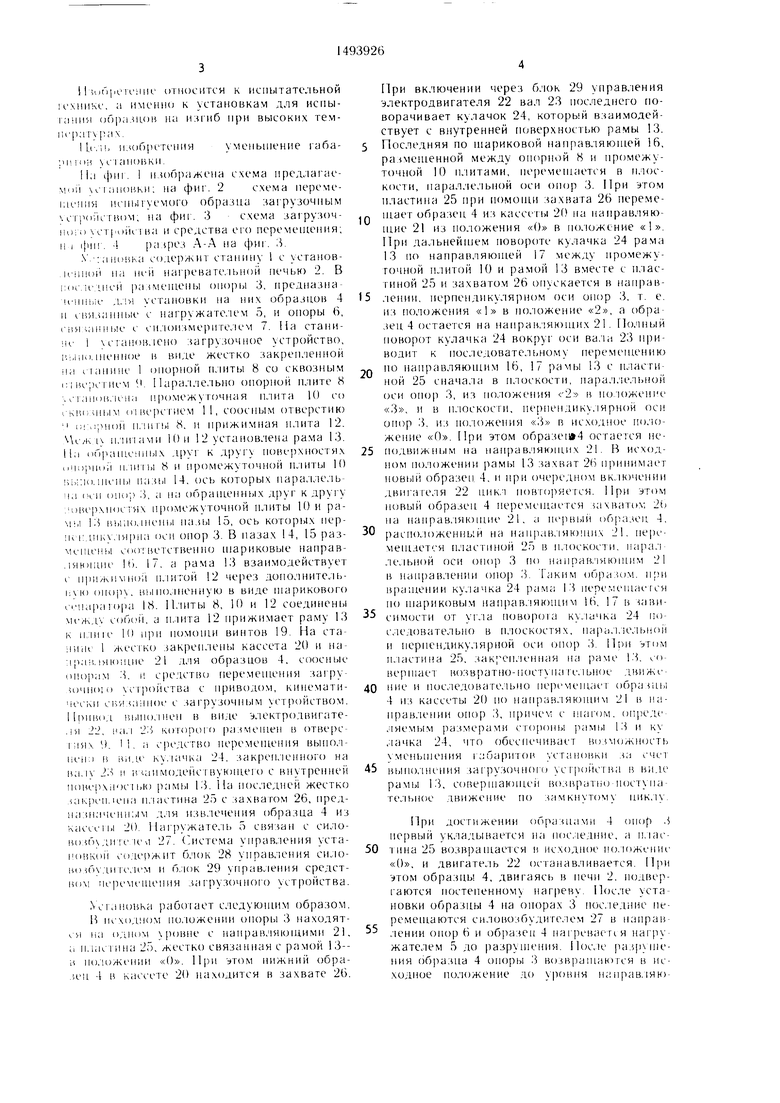
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ПАРЫ СУХОГО ТРЕНИЯ НА ИЗНОС ПРИ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ | 2020 |
|
RU2745799C1 |
| Установка для подачи полосы на размотку | 1990 |
|
SU1799651A1 |
| Устройство для контроля жидкости в прозрачных ампулах | 1985 |
|
SU1453262A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство для стапелирования деталей | 1986 |
|
SU1397124A1 |
| Устройство для трафаретной печати на печатных платах | 1986 |
|
SU1406001A1 |
| Загрузочный ротор | 1989 |
|
SU1673378A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАТОЧНОЙ МАШИНЫ И ШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2162782C2 |
| Устройство для многоцветной печати штучных изделий | 1985 |
|
SU1357250A1 |
| Загрузочное устройство | 1989 |
|
SU1726198A1 |
Изобретение относится к испытательной технике. Цель изобретения - уменьшение габаритов установки. Установка содержит станину, установленные на ней печь с опорами, силовозбудитель, загрузочное устройство, и средство его перемещения с приводом. Загрузочное устройство выполнено в виде закрепленных на станине параллельно одна другой опорной плиты 8, промежуточной плиты 10, рамы 13 и прижимной плиты 12. На опорной и промежуточной плитах 8 и 10 выполнены пазы 14, ось которых параллельна оси опор, а на раме 13 и промежуточной плите 10 - пазы 15, ось которых перпендикулярна оси опор. В пазах размещены шариковые направляющие 16 и 17, а между рамой 13 и прижимной плитой 12 - шариковый сепаратор 18. Средство перемещения выполнено в виде кулачка 24, взаимодействующего с поверхностью рамы 13 и закрепленного на валу 23 электродвигателя 22. На раме 13 закреплена пластина 25 с захватом, а на станине закреплены направляющие 21, соосные опорам, и кассета 20 для образцов 4. При вращении кулачка 24 рама 13 совершает возвратно-поступательное движение по направляющим 16 и 17. При этом захват извлекает образцы 4 из кассеты 20, а пластина 25 последовательно перемещает их по направляющим 21 в направлении опор с шагом, определяемым размерами сторон рамы 13 и кулачка 24, что обеспечивает уменьшение габаритов установки. После установки образца 4 на опоры включают силовозбудитель, разрушают образец 4 и повторяют цикл испытаний, перемещая последующие образцы 4 на опоры. 1 з.п. ф-лы, 4 ил.
-
4
СО
со :о
N5
Oi
i I iiл ||лмч :ин ОТНОСИТСЯ К испытатс.тьной к хникс, а именно к установкам для испы- i;iinr/i ()пра.М1.()и на илгиб при высоких тем- iii paiA pax,
lb,i, И,(Обретения умеиьн1ение габа- .ч 111И i.i ановки.
На (}п. 1 и.и)бражена схема нредлагае- Mnii SC I апоики ; на фи1 . 2 схема переме- iueiiiiH iiciii.li уемого образца нагрузочным сц оГк гв1)1; на фиг. 3 схема загрузоч- погп сг| 011с1ва и средства его перемещения; II I |(1|1г, 4 разрез А-А на фиг. 3.
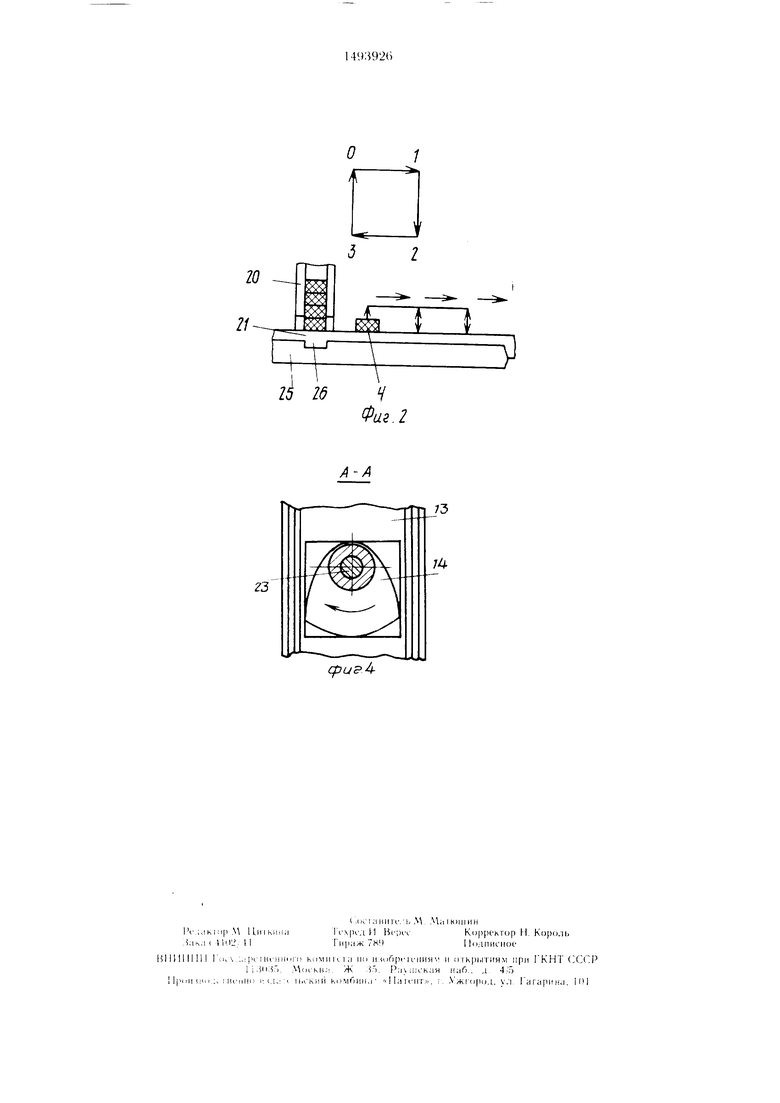
N - ; а новка содержит станину 1 с установ- U iiinn t на iieii нагревате.тьно11 2. В i:(uMe uicii размещены опоры 3, предназна- u-Hiii.ie д. установки на них образцов 4 II сия.данные с нагружате. 1ем 5, и опоры 6, ciiHiaiiiibie с си.тоизмерите.тем 7. На стани- И 1 станов.leiio загрузочное устройство, p.i.iiui. шенное в виде жестко закрепленной jia I laiiMiie 1 опо1М1ОЙ плиты 8 со сквозным i; i нсрсгием 1. .тле.тьно онорпой плите 8 ч с 1 aiiDii. ieiia промежут очная нлита К) со |-ки1);|1ым (11 вс рстие.м 11, соосным отверстию I |;|-,1;м1оГ| н. шгы 8, 11 нрижимная плита 12. 1 н. ииами 1()и 1 2 установлена рама 13. 11а порашсины.х друг к Д1)угу поверхностя.х ijiii j4iuii 11.1ИТЫ 8 и промежуточной п,:|иты И) (i. 111С11Ы пазы 14, ось которых нара.тлель- :ia (Ч Н оно;) 3, а па обращенных друг к другу . oiH pxiiocivix 11|)омежуточн()й плиты К) и pa- Mi,i 13 иьглолнен, na.ibi 15, ось которых нер- к гднкуляриа оси опор 3. В пазах 14, 15 раз- MciiuMibi соответственнее шариковые паправ- .1ян)111П1 If). 17, а рама 13 взаимодействует с- прижимно; плитой 12 через донолнитель- () О11ор, вынолнепную в виде шарикового ci iiapa o|ia 18. Плиты 8, 10 И 12 соединен1)1 |сжд собсч1, а 11,тита 12 прижимает раму 13 к II пне К) при помощи винтов 19. На ста- няис 1 /)естко .}акреп.тены кассета 20 и на- а ра; ,. inioiHiie 21 для образцов 4, соосные опорам 3, 11 средство перемещения загру- iO4Hoio yc ipoiicTBa с приводом, кинематически cBV 3aiinoe с загрузочн1)1м устройством. Привод г ы11ол11еп в у.тектродвигате- .Я 22, ма,1 2i ) которого размешен в отверс- 1аях 9. И. а с)1едство перемещения вы110,а lieiia в ви.1,е ку.шчка 24, закрен;1еиного на Ba.iy 23 и ича11моде11ствук)1цего с внутренней 11ове()Х||ос1 ыо рамы 13. На последней жестко (. ii.leiia n.iacTnna 25 с захвагом 26, пред- назпаченнмм д, 1я извлечения образца 4 из кассе ы 20. Нагружате.ть 5 связан с сило- возбх.- лпе 27. (лк тема управ.:1енпя уста- iKiHKiiii с(1.черж1гг блок 28 управления сило- во « п .чигслем и б.:|ок 29 управления средством перемешенин загрузочного устройства.
NciaiiouKa работает следующим образом.
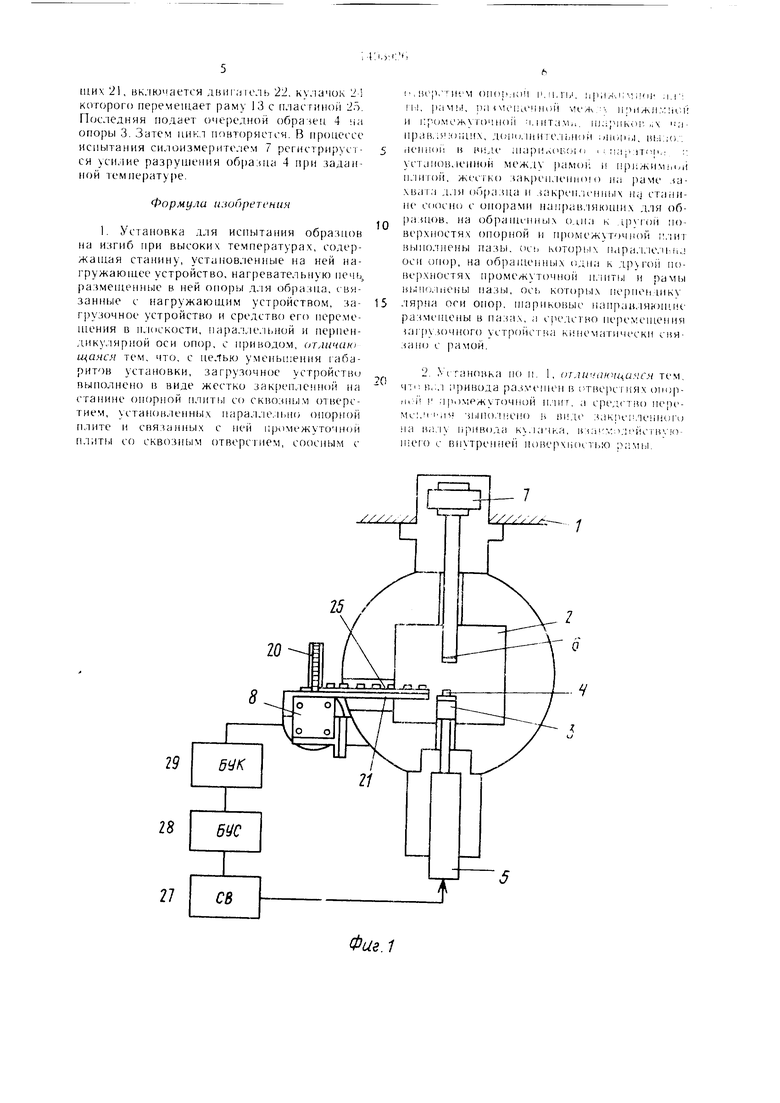
И нсходнох положении опоры 3 находятся па одном ровне с на11рав, 1Я1он1ими 21, а пластина 25, жестко связанная с рамой 13-- и 11о,ожении «О. При этом нижний обра- .;еи 4 в кассете 20 находится в захвате 2().
При включении через блок 29 управления электродвигателя 22 вал 23 последнего поворачивает кулачок 24, который взаимодействует с внутренней поверхностью рамы 13.
Последняя по шариковой направляющей 16, размешенной между опорной 8 и промежуточной 10 н.:1итами, неремен|ается в п,аос- кости, параллельной оси опор 3. При утом пластина 25 при номоши захвата 26 переметает образец 4 из кассегы 20 на направляющие 21 из положения «О в по. южение «1. Нри дальнейшем 11ОВ(.)роте кулачка 24 рама 13 по направ,пяюшей 17 между промежу- гочной плитой И) и рамой 13 вместе с пластиной 25 и захватом 26 опускается в направлении, перпепдикулярном оси опор 3, т. е. из положения «1 в положение «2, а образец 4 остает ся на направляющих 21. Полный поворот кулачка 24 вокруг оси вала 2;5 приводит к последовательному перемещению
но направляющим 16, 17 рамы 13 с пластиной 25 сначала в плоскости, паралле,-1ьпой (п-и опор 3, из по.тожения 2 в 1(.).1оже11ие «3, и в н,тоскосги, пер11епдику,1ярной оси опор 3. из по. южеиия «3 в исходное no, io- жение «О. При этом образе11 4 остается неподвижн1)1м на направляющих 21. В исходном положении рамы 13 захват 26 прииимас т HOBbiii образец 4, и при очередном вк.тючепии двигагеля 22 цикл повторяегся. Нри этом HOBbiii образец 4 перемешается (ахватох; 2(.i па направляющие 21, а nepiibni образец 4,
распо,1оженный на направ.чяюших 21. перемешается пластппой 25 в н.юскости, иарал лельной оси опор 3 но ианрав. шюшим 21 в направлении опо|) 3. Таким o6pa;u)M. ii)ii вращении ку.тачка 24 рама 13 перемешаск я по шариковым направ,1яюшим 16, 17 в зависимости от угла iKJBOpoia ку.тачка 24 по- с, 1едователы1О в плоск(Х тях, napa,i,ie. ibiioii и пернендику.тяриой оси опор ii. HiMt этом ц.тастипа 25, зак;чл1ленная на раме I. 1 сове pHiaei В()зв)атпо-11ост па ге,1ьиое движсline и последовате, 1ьно перемешает образцы 4 пз кассеты 20 по паправ-тяюшим 21 в иа- правлеппи опор ., причем с шагом, определяемым размерами CTojioniji рамы 13 и ,тачка 24, что обеспечивает (1Жность уменьшения i абаритов М ганоикп л л 1 чет
выно,11и ния загрузочного устройства в виде рамы 1.3, совершаюикм возвратно поступательное движение по замкнутомх цик,1 .
При достижении образцами 4 ono(i Л первый укладывается на последние, а п.тас- типа 25 возвращается в исходное по.юженис «О, и двигатель 22 останав,чивается. При этом образцы 4, двигаясь в нечи 2, подвергаются постепенному нагреву. После установки образцы 4 на опорах 3 пос,1едние перемешаются силовозбудиге, 1ем 27 в паправ лении опор 6 и образец 4 нагревается нагру жателем 5 до разрушеппя. После разр тения образца 4 1)поры 3 возвращаются в ис- ходпое положение до уровня н;;нрав.1яю
тих 21, вк. 1ючается двис.чюль 22, кулачок 21 которого перемещает раму 13 с n.-iacTMHoii 25. Последняя подает очередной обрачеи 4 на опоры 3. ,3атем цикл гюнторяетсч. В процес се испытания силоизмерито.-|ем 7 регистрируется усилие разрушения образца 4 при задаи иой пемпе|)ату)е,
Формула изобретения
29
28
27
0
5
лн -р. нем on()i);i;i4 м.илч,, мри, .; .indi ;i.i : ii-.i, рамь, pa (мепа пноп меж : .;:1С.й и промож.уточноЛ плитам,. ii), ipiiK()r. ..х ia- npitB.;;|ioiiuix, до1и)лин С.1Ы1-;)м ,, гкчпюй в iMbie aiapii.Niuuji 1 : на ji:),: :; устап()в,1е||ной между рамои н П)|;жи.м |1у|1 n. inioii, жесгко .зак|)епл1Ч11101 о на раме за- хвага для ()б)азпа и закрен.1е11Н1,1Х па станине соосио с опорами направляющих для об- )a.inoB, на об1 )ани. пных одна к .)й поверхностях опорной и промежуточной II/IHT кьпюлнены пазы, ось KOTopi ix , Lie,ibiij оси опор, на o6paiueiiHi)ix (дна к ) | поверхностях П)омежуточно11 нлиты н paMiii иьлил иены пазы, ось которых пе)пеьдпку ,тярна оси опо), шариковые напра,1ЯН)П1не размеп1ены в пазах, а С1чмс1но пе 1е импения 1аг)у.«)чпого устройства кинематическп связано с рамой.
Фаг.1
21
22
дзиэЛ
i
