личного вида. На корпусе 1 захватного устройства установлена захватывакл-чая его с возможностью перемещения вдоль корпуса упорная втулка 7. Ось 8 двуплечих рычагов радиально закреплена на упорной втулке 7 и расположена в пазу 10 корпуса 1. С одной стороны
продольного паза 10 выполнен паз, снабженный упорами. Ось двуплечих рычагов снабжена кулачком, взаимодействующим с упорами для фиксации упорной втулки относительно корпуса. Нижний конец 15 корпуса выполнен коническим. 1 3.п. ф-лы, 5 ип.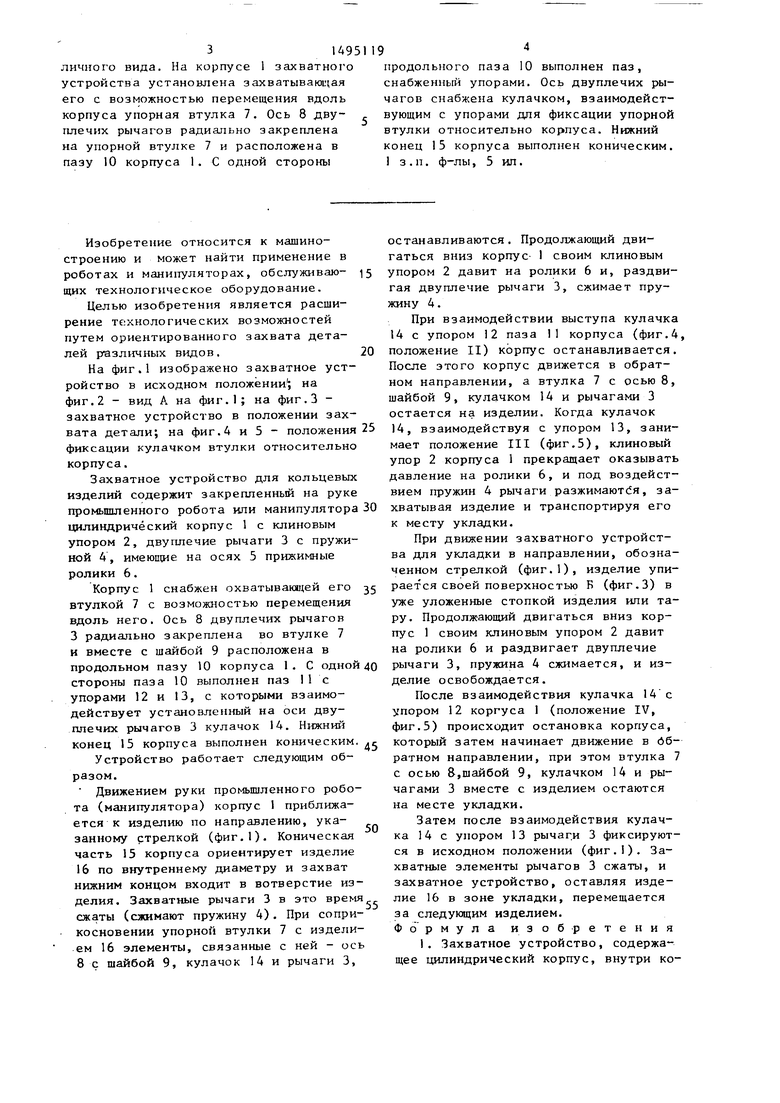
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| Устройство для графаретной печати | 1989 |
|
SU1694419A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Манипулятор | 1984 |
|
SU1222536A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1975 |
|
SU527286A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Автооператор | 1986 |
|
SU1364430A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
Изобретение относится к машиностроению и может найти применение в роботах и манипуляторах, обслуживающих технологическое оборудование. Целью изобретения является расширение технологических возможностей путем ориентированного захвата деталей различного вида. На корпусе 1 захватного устройства установлена захватывающая его с возможностью перемещения вдоль корпуса упорная втулка 7. Ось 8 двуплечих рычагов радиально закреплена на упорной втулке 7 и расположена в пазу 10 корпуса 1. С одной стороны продольного паза 10 выполнен паз, снабженный упорами. Ось двуплечих рычагов снабжена кулачком, взаимодействующим с упорами для фиксации упорной втулки относительно корпуса. Нижний конец 15 корпуса выполнен коническим. 1 з.п. ф-лы, 5 ил.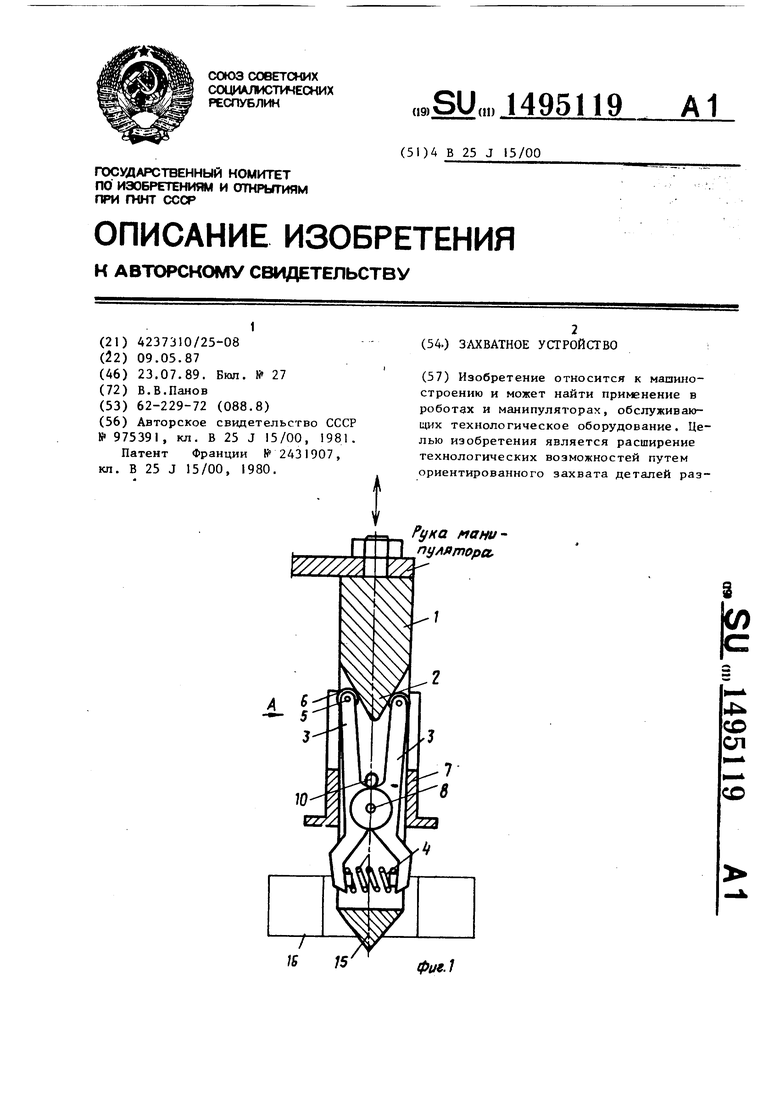
Изобретение относится к машиностроению и может найти применение в роботах и мани1туляторах, обслуживаю- щих технологическое оборудование.
Целью изобретения является расширение Т€;хнологических возможностей путем ориентированного захвата деталей различных видов.
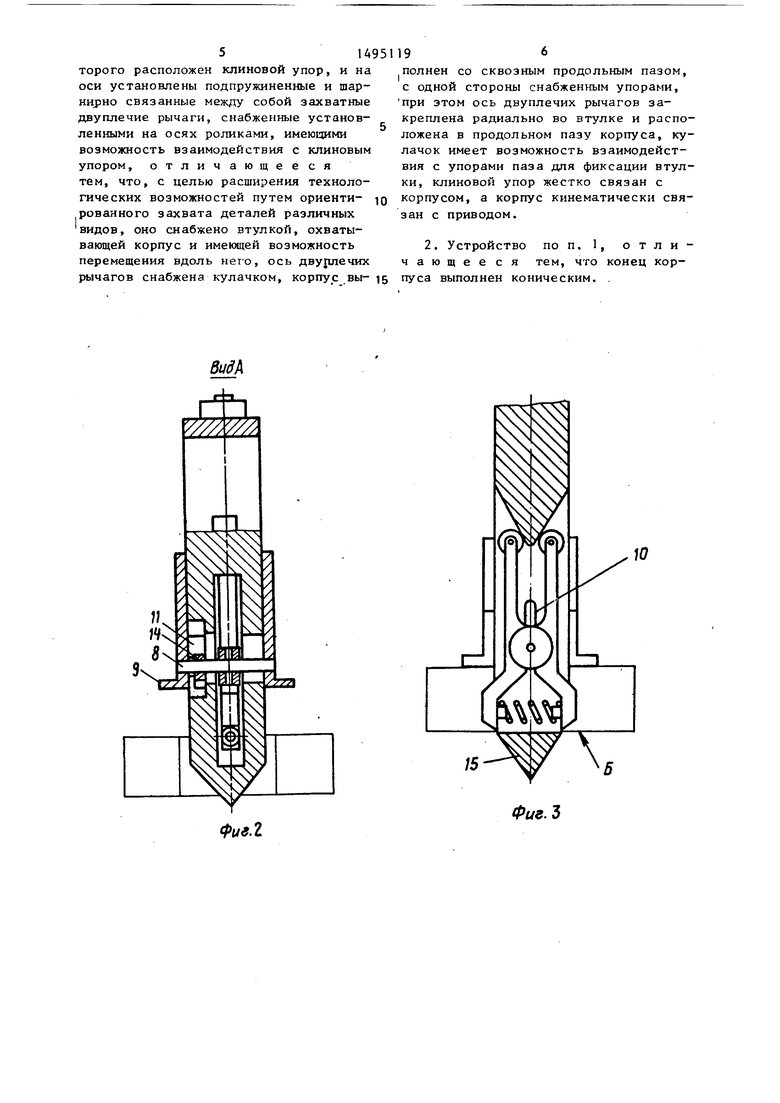
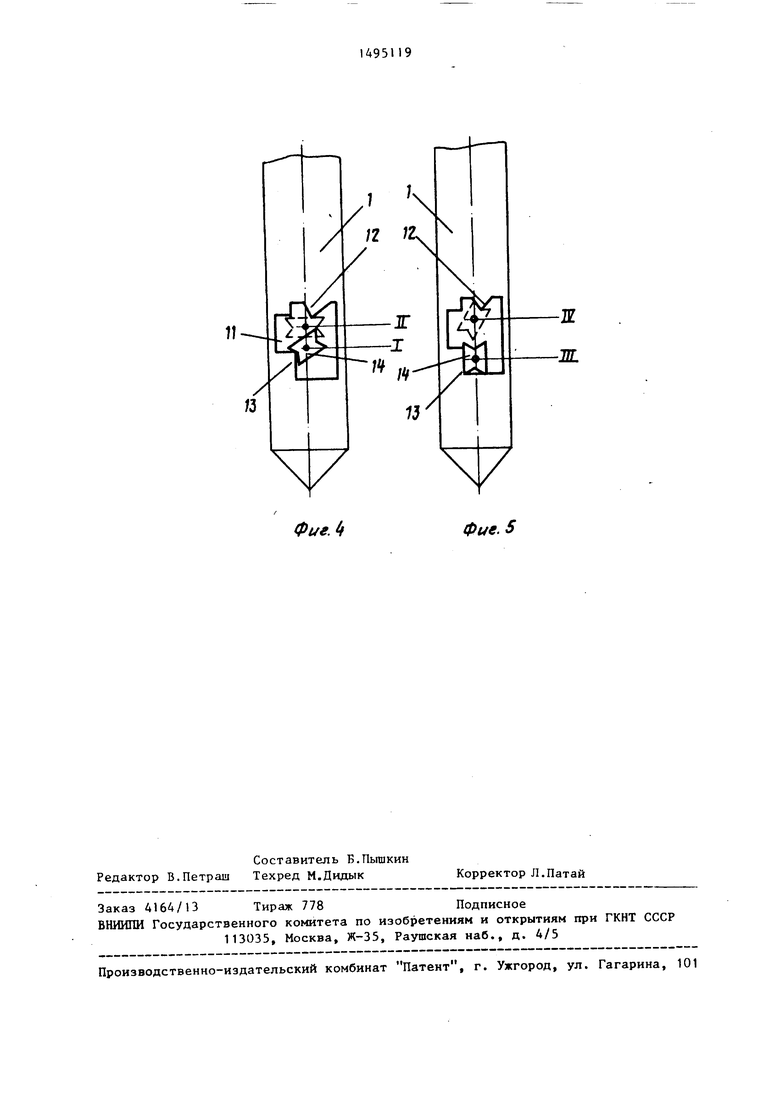
На фиг.1 изображено захватное устройство в исходном положении ; на фиг.2 - вид А на фиг.1; на фиг.З - захватное устройство в положении захвата детали; на фиг.4 и 5 - положения фиксации кулачком втулки относительно корпуса.
Захватное устройство для кольцевых изделий содержит закрепленный на руке промышленного робота или манипулятора цилиндрический корпус 1 с клиновым упором 2, двуплечие рычаги 3 с пружиной 4, имеюп1 1е на осях 5 прижимные ролики 6.
Корпус 1 снабжен охватывающей его втулкой 7 с возможностью перемещения вдоль него. Ось 8 двуплечих рычагов 3 радиально закреплена во втулке 7 И вместе с щайбой 9 расположена в продольном пазу Ш корпуса 1. С одной стороны паза 10 выполнен паз 11с упорами 12 и 13, с которыми взаимодействует установленный на оси двуплечих рычагов 3 кулачок 14. Нижний конец 15 корпуса выполнен коническим,
Устройство работает следующим образом.
Движением руки промышленного робота (манипулятора) корпус 1 приближается к изделию по направлению, указанному стрелкой (фиг.1). Коническая часть 15 корпуса ориентирует изделие 16 по внутреннему диаметру и захват нижним концом входит в вотверстие изделия. Захватные рычаги 3 в это время сжаты (сжимают пружину 4). При соприкосновении упорной втулки 7 с изделием 16 элементы, связанные с ней - ось 8 с шайбой 9, кулачок 14 и рычаги 3,
5
0
5
0
5 о .г
0
останавливаются. Продолжающий двигаться вниз корпус 1 своим клиновым упором 2 давит на ролики 6 и, раздвигая двуплечие рычаги 3, сжимает пружину 4.
При взаимодействии выступа кулачка 14 с упором 12 паза 11 корпуса (фиг.4, положение II) корпус останавливается. После этого корпус движется в обратном направлении, а втулка 7 с осью 8, шайбой 9, кулачком 14 и рычагами 3 остается на изделии. Когда кулачок 14, взаимодействуя с упором 13, занимает положение III (фиг.5), клиновый упор 2 корпуса 1 прекращает оказывать давление на ролики 6, и под воздействием пружин 4 рычаги разжимаются, захватывая изделие и транспортируя его к месту укладки.
При движении захватного устройства для укладки в направлении, обозначенном стрелкой (фиг.1), изделие упирается своей поверхностью Б (фиг.З) в уже уложенные стопкой изделия или тару. Продолжающий двигаться вниз корпус 1 своим клиновым упором 2 давит на ролики 6 и раздвигает двуплечие рычаги 3, пружина 4 сжимается, и изделие освобождается.
После взаимодействия кулачка 14 с упором 12 корпуса 1 (положение IV, фиг.5) происходит остановка корпуса, который затем начинает движение в йб- ратном направлении, при этом втулка 7 с осью 8,шайбой 9, кулачком 14 и рычагами 3 вместе с изделием остаются на месте укладки.
Затем после взаимодействия кулачка 1 4 с упором 13 рычаг.и 3 фиксируются в исходном положении (фиг.1). Захватные элементы рычагов 3 сжаты, и захватное устройство, оставляя изделие 16 в зоне укладки, перемещается за следующим изделием. Формула изобретения
торого расположен клиновой упор, и на оси установлены подпружиненные и шар- нирно связанные между собой захватные двуплечие рычаги, снабженные установленными на осях роликами, имею15ими возможность взаимодействия с клиновым упором, отличающееся тем, что, с целью расширения технологических возможностей путем ориенти- Q рованного захвата деталей различных видов, оно снабжено втулкой, охватывающей корпус и имеющей возможность перемещения вдоль него, ось двугшечих рычагов снабжена кулачком, корпус вы- 15
Фи.г
196
полнен со сквозным продольным пазом, с одной стороны снабженным упорами, при этом ось двуплечих рычагов закреплена радиально во втулке и расположена в продольном пазу корпуса, кулачок имеет возможность взаимодействия с упорами паза для фиксации втулки, клиновой упор жестко связан с корпусом, а корпус кинематически связан с приводом.
/5
Фиг.Ъ
Фие. ff
N
;z )zj
Фие. 5
| Схват | 1981 |
|
SU975391A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| МОДУЛЬ ОСВЕТИТЕЛЬНОГО УСТРОЙСТВА | 2007 |
|
RU2431907C2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ;f | |||
