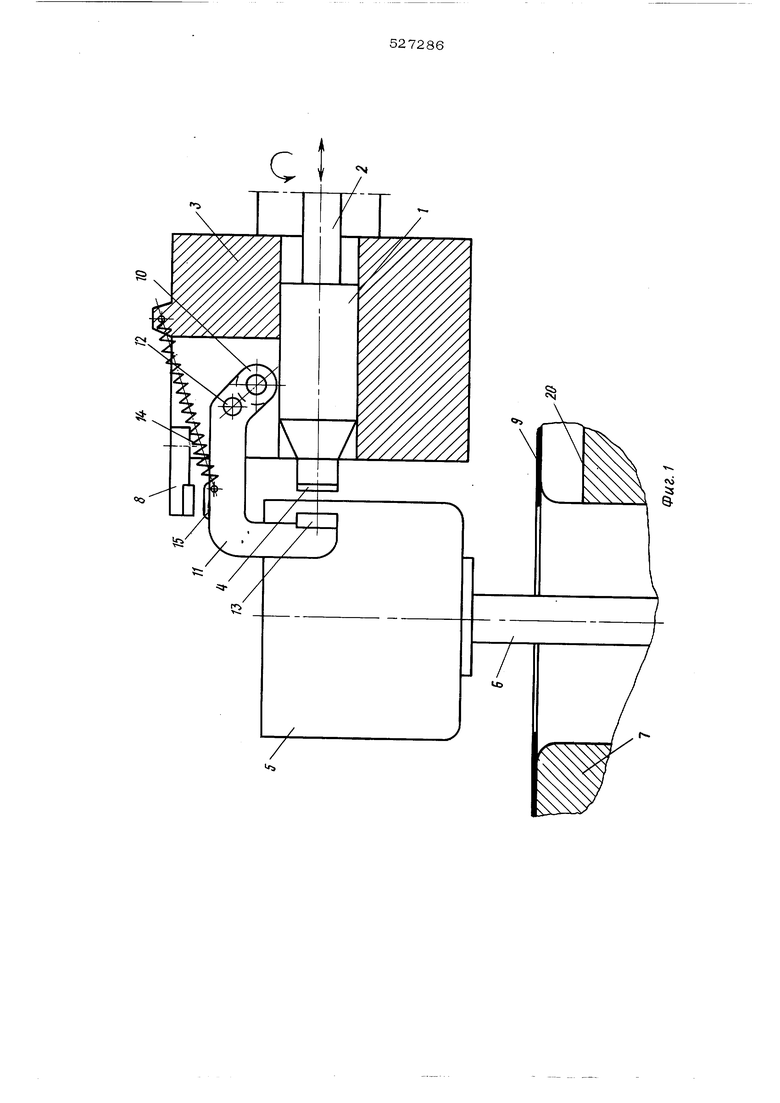
ловой цилиндр и пару губок, одна из которых жестко связана со штском, а другая шаршфно. Губка, жестко с -Чзанная со штоком, взаимодействует со тенкой удаляемо детали иоверхностью, рас юложенной под углом к оси штока. Поворотная губка пово рачивается под воздейг твием кулачка, жестко связанного со .током, вокруг оси, скрещивающейся с oct о штока. Возвращает губку в исходное, нерабочее положение пружина. Предлагаемое лриспособление обеспечивает возможность захвата и удаления по- .пых деталей типа стаканчиков и отделенных от этих деталей кольцевых отходов. Это приспособление предназначено для захвата и удаления полых деталей и отходов при помощи манипулятора, в котором подвижная головка сочленена с несущей ее деталью без возможност;; поворота, например, при помощи промь;тленного робота. Эта возможность обеспечивается благодаря тому, что приспособление снабжено дополнительной парой губок, одна из которых выполнена в виде планки, жестко закрепленной на захватной головке, а другая установлена с возможностью :,„ --рога вокруг оси, скрещивающейся с осью щтока Неподвижно установленная дополнительная губка имеет рабочую поверхность, взаимодействующую с отходом, которая расположена иод углом, преимущественно прямым к взаимодействующей с удаляемой деталью поверхности губки, жестко связанной со щтоком. Дополнительная поворотная губка кинематически связана с кулачком. В соответствии с изобретением предлагаются два варианта выполнения приспособ ления. По одному из вариантов дополнительная поворотная губка жестко связана с пово-. ротной губкой, взаимодействующей с удаля емой деталью. Поверхности взаимодействи обеих поворотных губок соответственно с удаляемой деталью и отходом взаимно рас положены под углом, преимущественно рав ным 90°. Захватная головка установлена на манипуляторе с возможностью поворота относительно оси щтока. По другому варианту дополнительная поворотная губкарасположена на конце дополнительного рычага, поворачиваемого вокруг дополнительной оси, закрепленной в захватной головке, и входящего другим концом в паз, выполненный в кулачке. На фиг. 1 показан первый вариант выполнения приспособления с захватной голо КОЙ, повернутой на 180 относительно исходного положения; на фиг. 2 - второй вариант исходное положение. Приспособление (фиг, 1 и 2) содержит кулачок 1, закрепленный на щто1:е 2 привода возвратно-поступательного перемещения (на чертежах не показан) кулачка, движущегося по направляющей поверхности захватг ой головки 3, Головку устанавливают на руке манипулятора (на чертежах не показагта). С кулачком жестко связана неподвижгая губка 4, служащая для захвата детали 5 типа стаканчика, выталкиваемой толкателем 6 из гнезда матрицы. В корпусе головки закреплена неподвижная губка .3, служащая для захвата кольцевого отхода 9. С кулачком взаимодействует ролик 10, закрепленный на конце двуплечего рычага 11, поворачиваемого вокруг оси 12, в свою очередь неподвижно закрепленной в захвс(тной головке. На свободном конце двуплечего рычага смонтирована губка 13, поворачиваемая вместе с рычагом 11 вокруг ОСИ 12. Рычаг 11 подпружинен относительно захватной головки пружиной 14. В соответствии с первым вариантом выполнения приспособления с поворотной губкой 13 жестко связана дополнительная губка 15, также закрепленная на рычаге 11 т, поворачивающаяся совместно с ним E.-i г оси 12. Поверхности взаимодействия губкп 13 с удаляемой деталью 5 и губки 15 с отходом 9 расположены под угло.м одна к другой, преимущественно равным 90°. В соответствии со вторым вариантом выполнения приспособления на кулачке выполнен паз 16, в который входит сферический конец двуплечего рычага 17, закрепленного с возможностью поворота л а оси 18. На другом конце рычага 17 смонтирована губка 19. Работает приспособление следующим образом. После вытяжки полой детали с фланцем и его обрезки на той же рабочей позиции щтампа рука манипулятора с захватной головкой 3 подводится к кольцево.му отходу 9, образовавщемуся в результате обрезки, для чего в щтампе выполнен соответствующий паз 20, При этом в соответствии с первым вариантом выполнения при перемещении щтока 2 с кулачком 1 вправо по чертежу поворотный рычаг 11 поворачивается под действием пружины 14 относительно оси 12 и зажимает отход 9 между губками 8 и 15. После этого рука манипулятора с отходом 9 выводится из зоны пресса к месту складирования отходов. В это время производится выталкивание полой детали 5 выталкивателем 6 из гнезда матоицы 7,
При движении штока 2 влево поворотная губка 13 под действием кулачка 1 поворачивается н освобождает отход для сбрасывания его в тару для складирования Затем рука манипулятора вновь заводится в рабочую зону пресса, при этом захватная головка 3 поворачивается рукой манипулятора на 180 (в положение, показанное на фиг. 1), а шток 2 с кулачком 1 и губкой 4 отводится в крайнее правое положение. Рука манип лятора устанавливается в такое положение, чтобы при перемещении штока 2 с кулачком 1 влево повернуть губку 13 и осуществить захват детали 5 за стенку губками 4 и 13. Рука манипулятора вновь выводится из рабочей зоны пресса к месту складирования готовых деталей. Над тарой для складирования готовых деталей при перемещении штока 2 с кулачком 1 вправо губки 4 и 13 разводятся и освобождают стенку детали 5.
В соответствии со вторым вариантом выполнения после вытяжки полой детали с фланце и его обрезки рука манипулятора с захватной головкой 3 так же, как и в первом варианте, подводится к кольцевому отхэду 9 таким образом, чтобы отход разместился между губками 8 и 19. При переме::,бнии штока 2 с кулачком 1 вправо паз 16 кулачка 1 взаимодействует со сферическим концом рычага 17 и поворачивает его относительно оси 18. При этом происходит зажим отхода 9 между ry6KaivJH
8и 19. После этого рука манипулятора г захваченным отходом 9 выводится из рСочей зоны пресса к месту складкров- ;ия отходов. В это время производится 1тал- кивание полой детали 5 выталкива- лем 6 из гнезда матрицы 7.
При движении штока 2 с куг чком 1 влево паз 16 кулачка 1 внов взаимодействует со сферической гол кой рычага 17, поворачивает его и освобождает отход
9для сбрасывания его в тару 1ля складирования. Рука манип лятора вновь заводится в рабочую зону пресса и располагается над вытолкнутой из полости матрицы полой деталью 5. В отличие от первого варианта выполнения поворота захватной головки в этом случае не требуется. При движении штока 2 с кулачком 1 влево кулачок 1 взаимодействует с роликом 10 рычага 11, поворачивает его, преодолевая сопротивление пружины 12, и устанавливает поворот- ную губку 13 напротив неподвижной губки 4. При дальнейшем перемещении штока 2 влево происходит зажим стенки полой детали 5. Рука манипулятора вновь выводится из зоны пресса к месту складирования гото вых деталей. Освобождение захваченной
детали осуществляется гак же, как в первом варианте.
формула изобретения
1. Приспособление к м анип лятору для захвата и удаления полых деталей из гнезда вытяжной матр1щы, содержащее захватную головку с парой взаимодействующих зажимных губок, одна из которых
. жестко связана со щтоком, возвратно-поступательно подвижным в направлении, параллельном зеркалу матрицьт, и выполнена взаимодействующей со стенкой удаляемой детали поверхностью, расположенной под углом, преимущественно равным 90 , к оси штока, а другая имеет возможность поворота вокруг оси, скрещивающейся с осью штока, и взаимодействует с кулачком, закрепленным на штоке, о т л и ч а юQ щ е е с я тем, что, с целью обеспечения возможности удаления полых деталей типа стаканчиков и отделенных от них кольцевых отходов, оно снабжено дополнительной парой губок, одна из которых выполнена в 5 виде планки, жестко закрепленной на захватной головке и имеющей поверхность взаимодействия с отходом, расположенну ю под углом, преимущественно прякъгм, к взаимодействующей с yдaляe oй деталью 0 поверхности губки, жестко связанной со щтоком, а другая установлена с возможностью поворота вокруг оси, скрещивающейся с осью штока, и кинематически связана с кулачком.
52. Приспособление по п. 1, о т л ич а ющ е-
е с я тем, что дополнительная поворотная губка жестко связана с поворотной губкой, взаимодействующей с удаляемой деталью, поверхности соприкосновения обеих пово- 0 ротных губок соответственно с удаляемыми деталью и отходом взаимно расположены под углом, преимущественно равнык; 90 , а захватная холовка выпо.лнена поВЭротной вокруг осп штока.
53. Приспособление по п. 1, о т л ичающееся тем, что дополнительная поворотная губка расположена на конце дополнительного рычага, поворачиваемого вокруг дополнительной оси, закрепленной 50 в захватной голвке, и входящего другим кoнцo в паз, вьшолненньп в кулачке.
Источн.ки информации, принятые во внимани- при экспертизе: 55 1. АВ-. свид. № 31О722, кл. В 2 ID 45/jO от О7.О4.70 г. 2 Авт. свид. № 2984О9, кл. В 2 ID 45/00; В 30 В 15/32 от 13.10.69 г. 3. Патент США № 3178040, кл. 214-1, 60 опубликованный 13,04.1965 г. (прототип).
h
ч -
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1981 |
|
SU990504A2 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Винтоверт | 1985 |
|
SU1305019A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |