4
со
00 05
оо
ОС
фиг. 2
Изобретение относится к области машиностроения и предназначено к использованию в конструкциях манипуляторов, применяемых для обслуживания гибких производственных систем, обрабатывающих листовые изделия, располагаемые в неподвижных пакетах или стопах, может быть также использовано в механизирующих устройствах щтамповочного производства и других отраслях мащиностроения для захвата листовых объектов манипулирования из стопы и подачи к обрабатывающей машине (в этом случае рука манипулятора должна останавливаться с учетом высоты остающейся части листов, либо работать синхронно с дополнительным сервисным устройством,-л подающим лист на точку позиционирования).
Цель изобретения - повышение надежности работы устройства.
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - схема его работы при наклонном положении стопы.
Устройство для захвата листового материала (фиг. 1) содержит несущий элемент 1, например основание, прикрепленное к руке автоматического манипулятора 2, тяги 3, шарнирно соединенные одним концом с основанием 1, а другим с ползунами 4. Последние надеты на общую траверсу 5, и подпружинены относительно нее пружинами 6. Нг траверсе 5 установлены вакуумные захваты 7 (или электромагнитные захватные устройства), которые могут взаимодействовать с листовыми объектами манипулирования, уложенными в стопу 8.
Устройство работает следующим образом.
В исходном положении несущий элемент поднят, ползуны 4 сдвинуты к центральной оси под усилием пружин 6. Далее несущий элемент в виде руки автоматического манипулятора по команде системы автоматического управления опускается в точку позиционирования. Эту точку выбирают таким образом, чтобы обеспечить захват нижнего листа в стопе, когда остальные сняты. При этом присоски деформируются, воздух из них вытесняется и под действием атмосферного давления лист прижимается к присоске. Пружины 6 удерживают ползуны от смещения. Их усилие выбирают из этого условия.
В случае, когда стопа полная, то несущий элемент все равно опускается до той же самой точки позиционирования. При этом под действием реакции стопы на присоски траверса 5 смещается вверх, так как ползуны 4 расходятся к ее концам, сжимая
пружины 6. при этом захват листа всущест- , вляется так же, как и в предыдущем случае. После захвата листа несущий элемент по команде системы автоматического управления поднимается и переходит на новую точку позиционирования. Здесь по команде внутреннюю полость присоски соединяют с атмосферой посредством открытия клапана, и лист отпускается. В случае оснащения захвата автоматического манипулятора электромагнитными захватами устройство работает так же, но захват и отпускание листа производятся при подаче или отключении электроэнергии по команде системы автоматического управления в соответствующее
5 время.
При захвате листового материала или установке на наклонное основание пружины 6 сжимаются на различное расстояние (фиг. 2). При этом траверса устанавливается параллельно опорной поверхности, что позволяет обеспечить захват и отпускание листа.
Изобретение позволяет использовать устройства в гибких производственных системах, где часто производится переналадка
5 и перемещение оборудования, так как не имеется копиров, устанавливаемых на неподвижных основаниях, и других дополнительных приводов и сервисных устройств, обеспечивается захват объектов манипулирова ния с наклонных поверхностей и с разной
0 высоты при постоянной точке позиционирования руки манипулятора за счет выполнения механизма дифференциальным при одновременном уменьшении количества звеньев. Происходит также удещевление устройства и системы управления манипулято5 ром за счет уменьшения количества необходимых точек позиционирования.
Формула изобретения
0 Устройство для захвата листового материала, содержащее несущий элемент, направляющую траверсу, тяги, одни концы которых шарнирно закреплены на несущем элементе, а другие связаны со смонтированными на траверсе подпружиненными пол5 зунами, и плиту с захватами, отличающееся тем, что, с целью повышения надежности работы устройства, направляющая траверса расположена между шарнирами крепления тяг к несущему элементу и плитой с захватами, которая жестко связана с
0 направляющей траверсой, установленной с возможностью перемещения вместе с плитой.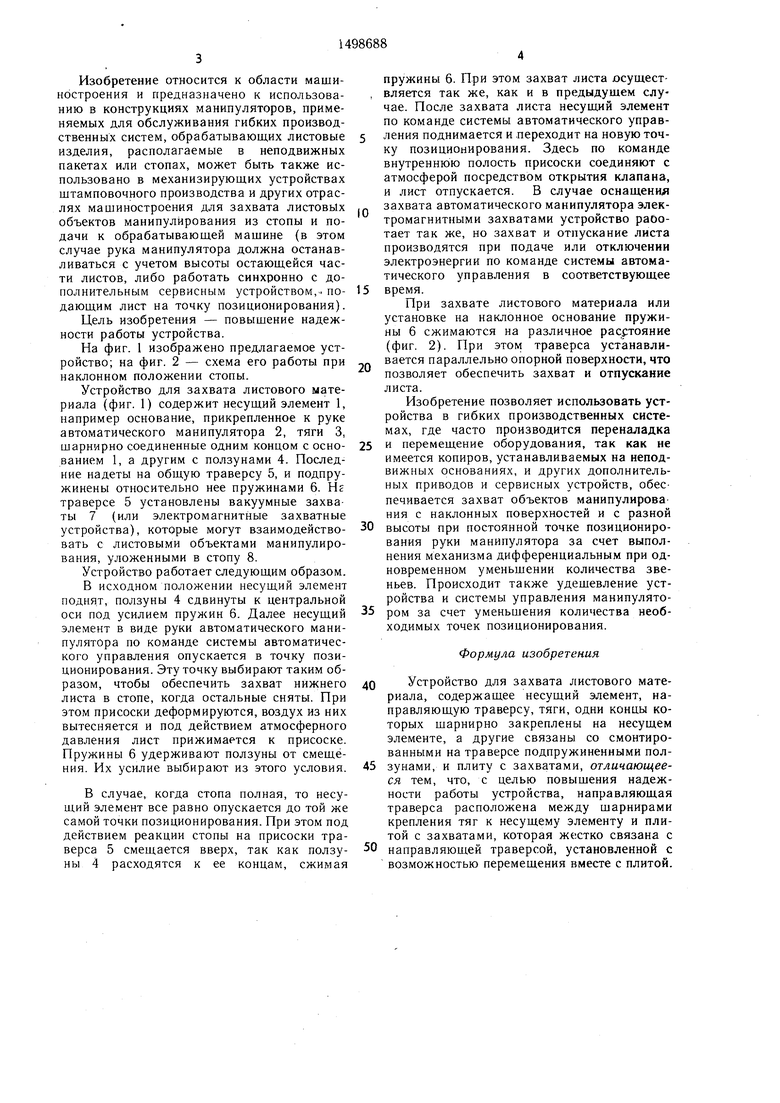
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1985 |
|
SU1268257A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| СТАПЕЛЬНАЯ ДОСКА ДЛЯ УКЛАДКИ СТОПЫ ЛИСТОВ (ВАРИАНТЫ) | 1995 |
|
RU2159732C2 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| ПРЕСС ДЛЯ ВЫРУБКИ ДЕТАЛЕЙ ОБУВИ ИЗ РУЛОННЫХ МАТЕРИАЛОВ | 1990 |
|
RU2019113C1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
Изобретение относится к машиностроению и предназначено для обеспечения захвата листовых материалов неподвижной стопы и укладки их на различный уровень при постоянной точке позиционирования несущего элемента. Целью изобретения является повышение надежности работы устройства. Устройство содержит несущий элемент в виде основания 1, прикрепленного к руке автоматического манипулятора, шарнирно соединенные с ним коромысла 3, которые соединены с ползунами 4, надетыми на траверсу 5 и подпружиненными относительно нее пружинами 6. На траверсе закреплены вакуумные присоски 7 (или электромагнитные захватные устройства). При захвате листов коромысла 3 проворачиваются, раздвигая ползуны 4 и сжимая пружины 6. Присоски захватывают лист. При подъеме руки манипулятора коромысла и ползуны возвращаются в исходное положение под воздействием пружин 6. 2 ил.
№/
| Грузозахватное устройство | 1978 |
|
SU751776A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
