Известны механи.ческде руки к листоштамповочным -прессам с г.невматическИ М приводом механизмов захвата, подачи и подъема (опускания) зйготовки.
Предлагаемая механическая :рука отличается от известных тем, что она выполнена в виде каретки, движущейся в горизонтальных направляющих, расположенных перед прессом, над его рабочим пространством, а механизм захвата установлен в вертикальных направляющих на каретке.
Такое выполнение механической руки обеспечивает точные перемещения заготовок.
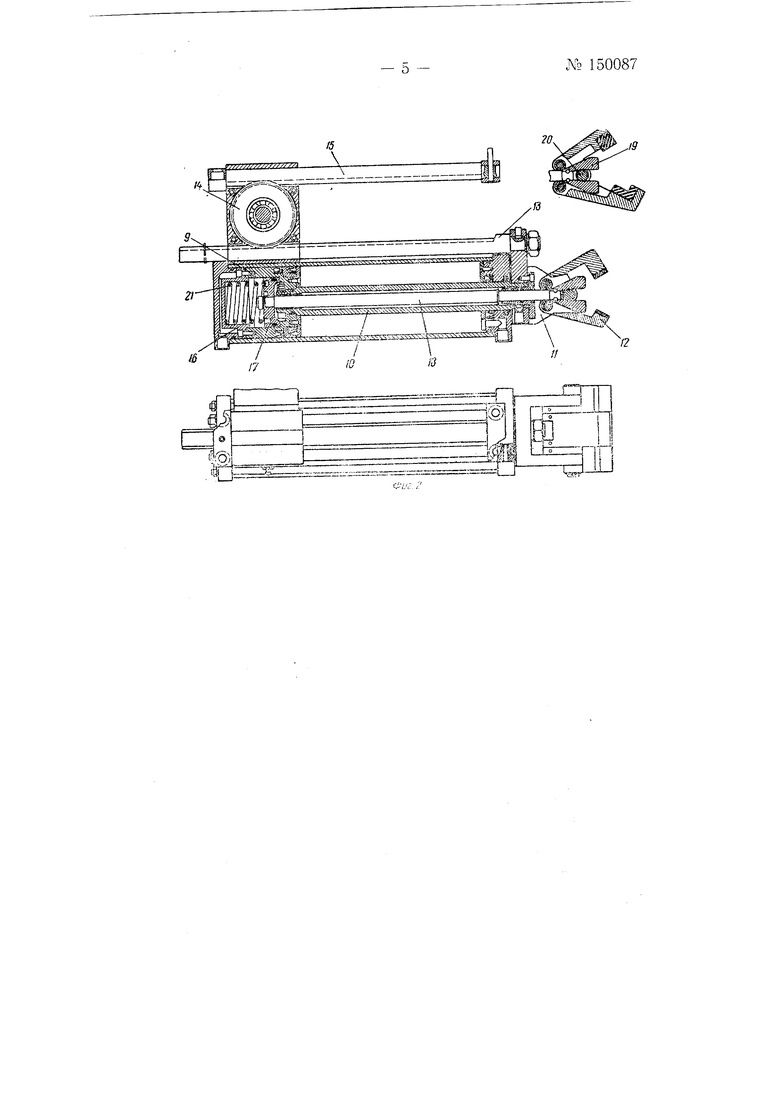
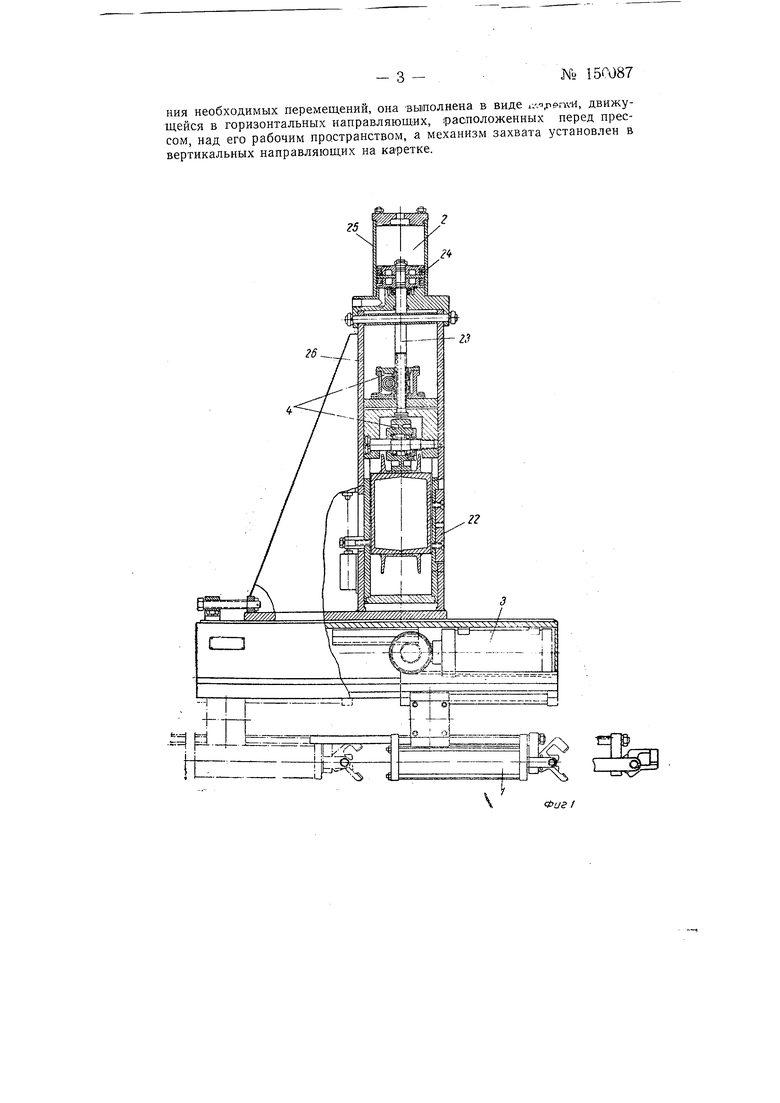
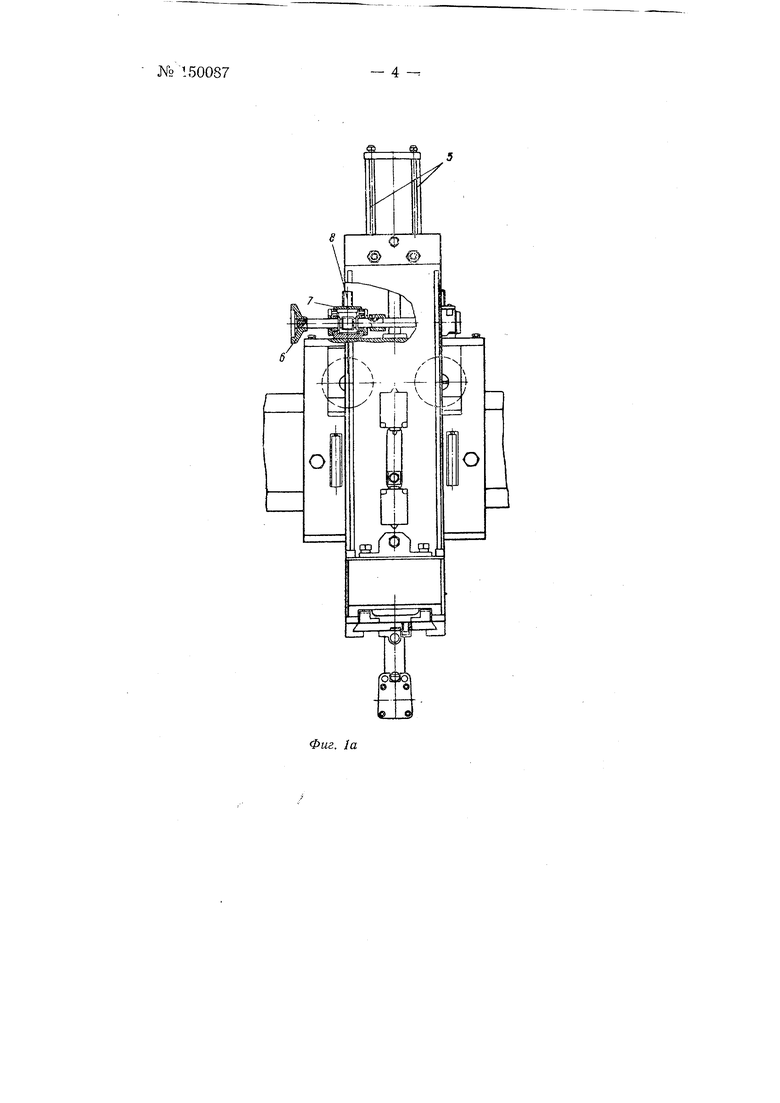
На фиг. 1 и 1а изображена механическая рука в двух проекциях; на фиг. 2-механизм захвата; на фиг. 3-цилиндр подъема.
Механическая рука состоит из следующих основных узлов: механизма } захвата, цилиндра 2 .подъема, механизма 5 подачи, механизма 4 регулировки и передвижения.
Механическая рука смонтирована на балке, шарнирно связанной со стойками пресса, и в случае необходимости отводится в сторону от зоны штамповки.
Балка имеет регулировку по высоте 300 мм относительно стоек пресса, которая осуществляется посредством винтов 5. Более тонкая наладка механической руки по высоте (в пределах 50 мм) идет за счет ее смещения относительно балки при помощи маховичка 6, двух червячных редукторов 7 и винтов 8. Общая регулировка механической руки по высоте равна 350 мм.
Механическая рука работает следующим образом.
От пресса при ходе ползуна вверх поступает команда механизму 2 захвата (см. фиг. 2). Воздух поступает в левую полость цилиндра и порщень 9 со щтоком 10 начинает движение вправо. На конце щтока смонтирсзана колодка 11, в которой крепятся губки 12 и сверху рей№ 150087- 2 ка 13. Рейка входит ъ зацепление с шестерней 14 и второй рейкой 15, условно неподвижной, т. е. при ходе поршня на 250 мм обпдкй ход относительно неподвижной рейки 15 составит 375 мм. Таким образом, происходит выдвижение -захвата. Положение захвата может регулироваться на 270 лш за счет изменения положения шестерни 14 относительно рейки 13, как указано на чертеже.
В крайнем выдвинутом положении через конечный выключатель псстулает команда цилиндру 16. Поршень 17 со штоком 18 идет влево и за счет клина 19, закрепленного на конце штока, запира.ет губки, разворачивая их относительно осп 20. В это .-время происходит сжатие пружины 21.
После того как произошел зажим изделия губками, поступает команда цилиндру подъема (см. фиг. 1) и механическая рука поднимает изделие на 100 мм.
Подъем происходит относительно балки по направляющей шпонке 22, причем шток 23 с поршнем 24, жестко связанные с балкой, неподвижны, а г |льза 25 через стойку 26, связанная с захватом, совершает подъем.
В конце хода вверх через конечные выключатели поступает команда на .:еханизм захвата и механизм (Подачи.
Оба механиз.ма начинают ход влево.
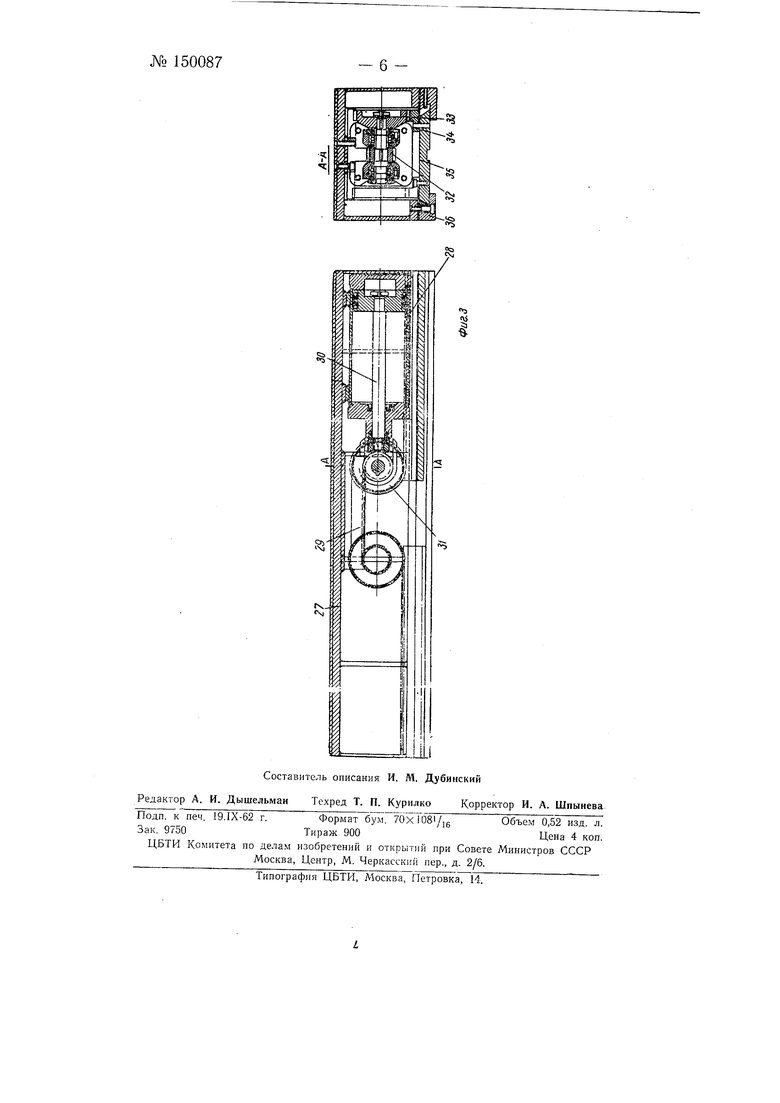
Механизм подачи {см. фиг. 3) работает след,уюш,им образом.
На основании 27, имеюш,ем форму коробки, укреплен цилиндр 28 и рейка 29. Ыа штоке 30 цилиндра монтируется блок 31 шестерен: шестерня 32 центральная и две шестерни 33 боковые.
Центральная шестерня входит в зацепление с нено/цвижной рейкой 29.
Боковые и:естерни зацепляются с двумя рейками 34, укрепленными на плите 35. Последняя «меет окорму ласточкина хво-ста и перемешается в направляющих 36, укрепленных на основании.
Таким образом, шток, совершая путь 175 мм, перемешает блок 31 шестерен также на 175 мм. Центральная шестерня, откатываясь по неподвижной рейке 29, передает вращение на боковые шестерни, которые через рейки 34 сообщают движение плите 35. Этот ход будет равен 350 мм, так как отношение центральной и боковых шестерен составляет 2:1. Следовательно, общий ход ллиты 35 равен 525 мм.
Итого общий ход механизма захвата составит 375+525 900 мм.
К нижней плоскости плиты 35 крепится рейка механизма захвата.
Мехапиз.м подачи имеет в горизонтальной плоскости регулировку относительно балок, равную 440 лш.
Механизм захвата, придя в крайнее левое положение, дает две команды, на разжим изделия и опускание механической руки.
Разжим изделия происходит следующим образом.
Из правой полости цилиндра 16 захвата сбрасывается воздух. Поршень 17 со штоком 18 шод действием пружины 21 отходят вправо и клин 19 освобождает губки -12.
В конце хода при опускании механической руки .поступает команда механизму подачи на движение вправо. Происходит подача захвата на 525 мм в исходное положение.
Предмет изобретения
Механическая рука к листоштамповочным прессам, с пневматическим приводом механизмов для захвата, подачи и подъема (опускания) заготовок, отличающаяся тем, что, с целью точиого осуществле17
19
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для подачи материала в зону обработки | 1986 |
|
SU1388159A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Автоматический комплекс для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1551451A1 |
| Автоматическая линия для штамповки крупногабаритных деталей | 1986 |
|
SU1496877A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
г
-1- tra
Ik
Щ
Составитель описания И. М. Дубинский
Редактор А. И. Дышельман Техред Т. П. Курилко Корректор И. А. Шпынева
Подп. к печ. 19.IX-62 г.Формат бТм. 70хГ081/ цОбъем 0,52 изд. л.
Зак. 9750Тираж 900Цена 4 коп.
ЦБТИ Комитета по делам изобретений и открытий при Совете Министров СССР
Москва, Центр, М. Черкасский пер., д. 2/6.
Типография ЦБТИ, Москва, Петровка, 14.
ния необходимых перемещений, оиа выполнена в виде .-/.- егл-я, движущейся в горизонтальных направляющих, расположенных перед прессом, над его рабочим пространством, а механизм захвата установлен в вертикальных направляющих на каретке.
-3 -№ 15Г087
26
Фиг Г
