315
Изобретение относится к области гидропривода рабочего органа землеройных машин, в частности скрепера.
Цель изобретения - повышение эф- фективности рабочего процесса загрузки ковша скрепера.
На фиг. 1 приведена схема устройства управления загрузкой ковша скрепера} на фиг. 2 - датчик уров- йя грунта; на фиг. 3 - датчик положения ротора.
Устройство управления загрузкой ковша скрепера содержит скрепер 1 с ковшом 2 и механизмом загрузки, выполненным в виде четырехлопастно- го ротора 3, управляемого гидроцилиндрами 4. Положение ротора 3 относительно ковша 2 определяется датчиком 5 положения ротора. На стенке ковша установлен датчик 6 уровня грунта.
Гидросистема управления ротора состоит из распределителя 7, насоса 8, сливного клапана 9, управляющего двухпозиционного электрогидрораспре делителя 10.
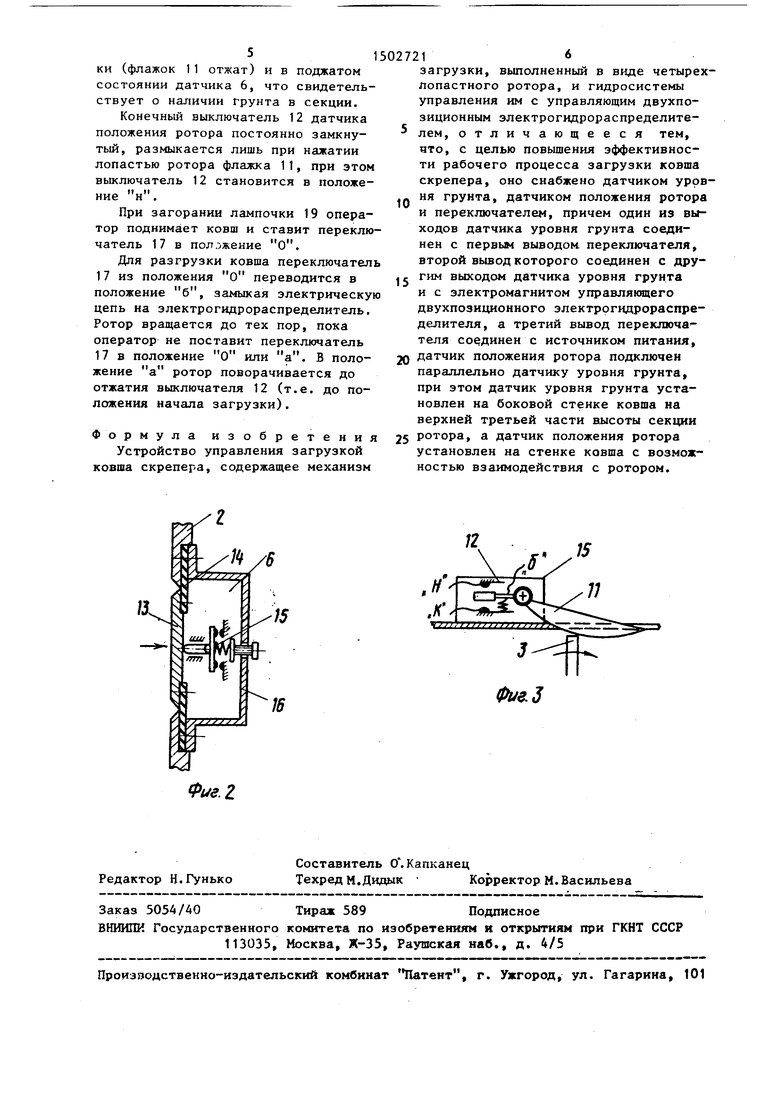
Датчик 5 положения ротора состои из флажка 11 и конечного выключателя 12. Датчик 6 уровня грунта состо ит из чувствительного элемента (диска) 13 и резинового кольца 14, которое закреплено на стенке ковша на высоте верхней третьей части высоты секции ротора. Диск 13 устанавлива- стся в одной плоскости со стенкой и удерживается в этом состоянии не только резиновым кольцом, но и пружиной 15. Датчик связан с конечным выключателем 16.
Кроме того, устройство управлени оснащено переключателем 17 и информационными лампочками 18 и 19. При этом один из выходов датчика 6 уровня грунта соединен с первым выводом переключателя 17, второй вывод которого соединен с другим выходом дат- бис электромагнитом электро- гидрораспределителя 10, а третий вывод переключателя 17 соединен с ис- точником питания, датчик 3 подключе параллельно датчику 6.
Устройство управления загрузкой ковша скрепера -работает следующим образом.
Одновременно с включением распределителя гидропривода перемещения ковша на загрузку переключатель 17 переводится в положение а. При
0
5
0 5 0
5 -
5
1 .4
этом, если лопасть ротора стоит согласно настройке системы, конечный выключатель 12 находится в положении н, а конечный выключатель датчика 6 уровня разомкнут и электрическая цепь обесточена, напряжение от аккумулятора не подается на электро- гидрораспределитель 10.
Если ротор находится в каком-либо другом положении и его лопасть не касается датчика положения, конечный выключатель 12 пружиной удерживается в положении к. Это приводит к тому, что на электрогидрораспредели- тель 10 поступает напряжение, которое перемещает его и перекрывает поток жидкости от насоса 8 сливным клапаном 9.
Жидкость от насоса поступает в распределитель 7 (на чертеже представлен один распределитель и один гидроцилиндр механизма поворота ротора, в действительности же гидроцилиндры установлены в обеих сторон ковша, а их штоки через кривошипы и вал поворачивают ротор, причем каждый гидроцилиндр имеет индивидуальный распределитель).
Распределитель 7 подает жидкость в гидроцилиндр поворота ротора 3. Ротор поворачивается до тех пор, пока одной из лопастей не нажмет на флажок 11 датчика положения. Это приводит к переводу управляющего электрогидрораспределителя 10 в положение, обеспечивающее подачу жидкости через сливной клапан 9 в бак.
По мере заполнения секции ротора грунтом срабатывает датчик 6 и включает конечный выключатель 16 на подачу напряжения в электрогидрорас- пределитель 10, что приводит к повороту ротора. После того, как лопасть с грунтом пройдет мимо датчика 6, его пружина 15 отжимает щайбу. Ко- He4Hbiii выключатель отсоединяется, но ротор продолжает поворачиваться, так как напряжение подается через датчик положения, который выключается только при нажатии следующей лопастью флажка 11. Ротор останавливается до включения датчика 6.
Процесс поворота продолжается до полного заполнения ковша и секций ротора грунтом, о чем подается сигнал (загорается лампочка 19), Лампочка 19 загорается в положении лопасти, соответствующей началу загрузки (флажок 11 отжат) и в поджатом состоянии датчика 6, что свидетельствует о наличии грунта в секции.
Конечный выключатель 12 датчика положения ротора постоянно замкну- тьй, размыкается лишь при нажатии лопастью ротора флажка 11, при этом выключатель 12 становится в положение н.
При загорании лампочки 19 оператор поднимает ковш и ставит переключатель 17 в положение О.
Для разгрузки ковша переключател 17 из положения О переводится в положение б, замыкая электрическу цепь на электрогидрораспределитель. Ротор вращается до тех пор, пока оператор не поставит переключатель 17 в положение О или а. В положение а ротор поворачивается до отжатия выключателя 12 (т.е. до положения начала загрузки).
Формула изобретени
Устройство управления загрузкой ковша скрепера, содержащее механизм
1502721
0
загрузки, выполненный в виде четырех- лопастного ротора, и гидросистемы управления им с управляющим двухпо- зиционным электрогидрораспределите- лем, отличающееся тем, ято, с целью повышения эффективности рабочего процесса загрузки ковша скрепера, оно снабжено датчиком уровня грунта, датчиком положения ротора и переключателем, причем один из выходов датчика уровня грунта соединен с первым выводом переключателя, второй вывод которого соединен с другим выходом датчика уровня грунта и с электромагнитом управляющего двухпозиционного электрогидрораспре- делителя, а третий вывод переключателя соединен с источником питания,
0 датчик положения ротора подключен параллельно датчику уровня грунта, при этом датчик уровня грунта установлен на боковой стенке ковша на верхней третьей части высоты секции
5 ротора, а датчик положения ротора установлен на стенке ковша с возможностью взаимодействия с ротором.
5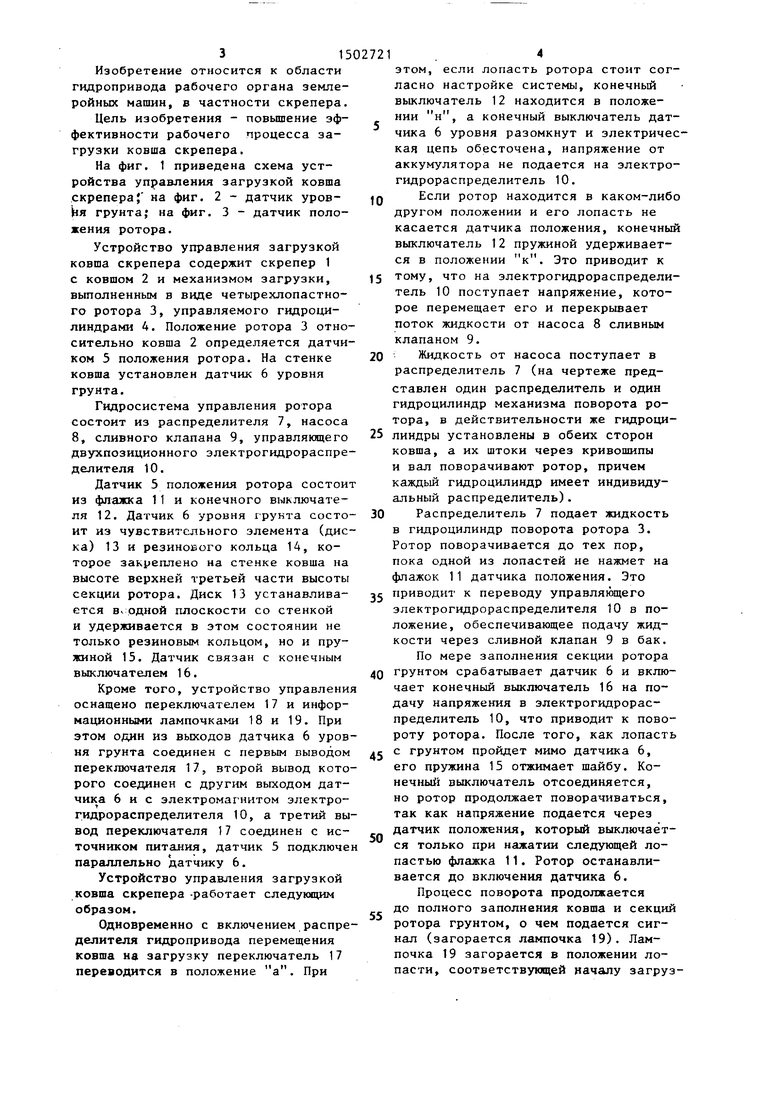
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического управления процессом разгрузки ковша скрепера | 1987 |
|
SU1448000A1 |
| Гидропривод заслонки ковша скрепера | 1977 |
|
SU720110A1 |
| Система автоматического управления процессом разгрузки ковша скрепера | 1987 |
|
SU1444481A1 |
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Лесозаготовительная машина с комплексным гидроприводом | 1989 |
|
SU1808747A1 |
| Скрепер | 1984 |
|
SU1263763A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗОЛОТНИКАМИ ГИДРОРАСПРЕДЕЛИТЕЛЯ СКРЕПЕРА | 1968 |
|
SU219665A1 |
| Бульдозер | 1984 |
|
SU1218010A1 |
| Ковш скрепера | 1986 |
|
SU1537767A1 |
| Скрепер | 1990 |
|
SU1810425A1 |
Изобретение относится к гидроприводу рабочего органа землеройных машин и позволяет повысить эффективность рабочего процесса загрузки ковша скрепера. Для этого на стенке ковша 2 установлен датчик 5 положения четырехлопастного ротора 3 с возможностью взаимодействия с ним, а на боковой стенке ковша 2 на верхней третьей части высоты секции ротора 3 установлен датчик 6 уровня грунта. Выходы датчика 6 соединены с двумя выводами переключателя 17, третий вывод которого соединен с источником питания. Второй вывод переключателя 17 соединен с электромагнитом управляющего двухпозиционного электрогидрораспределителя 10, а датчик 5 подключен параллельно датчику 6. По мере заполнения секции ротора 3 грунтом срабатывает датчик 6 и на электрогидрораспределитель 10 подается напряжение, что приводит к повороту ротора 3. Как только лопасть с грунтом проходит мимо датчика 6, он отключается. Ротор 3 продолжает поворачиваться, т.к. напряжение подается через датчик 5, и поворот продолжается до полного заполнения ковша 2 и секций ротора 3 грунтом, о чем подается световой сигнал лампочкой 19. Она загорается в положении лопасти, соответствующем началу загрузки и в поджатом состоянии датчика 6, что свидетельствует о наличии грунта в секции. Переключатель 17 переводится при этом в нулевое положение. 3 ил.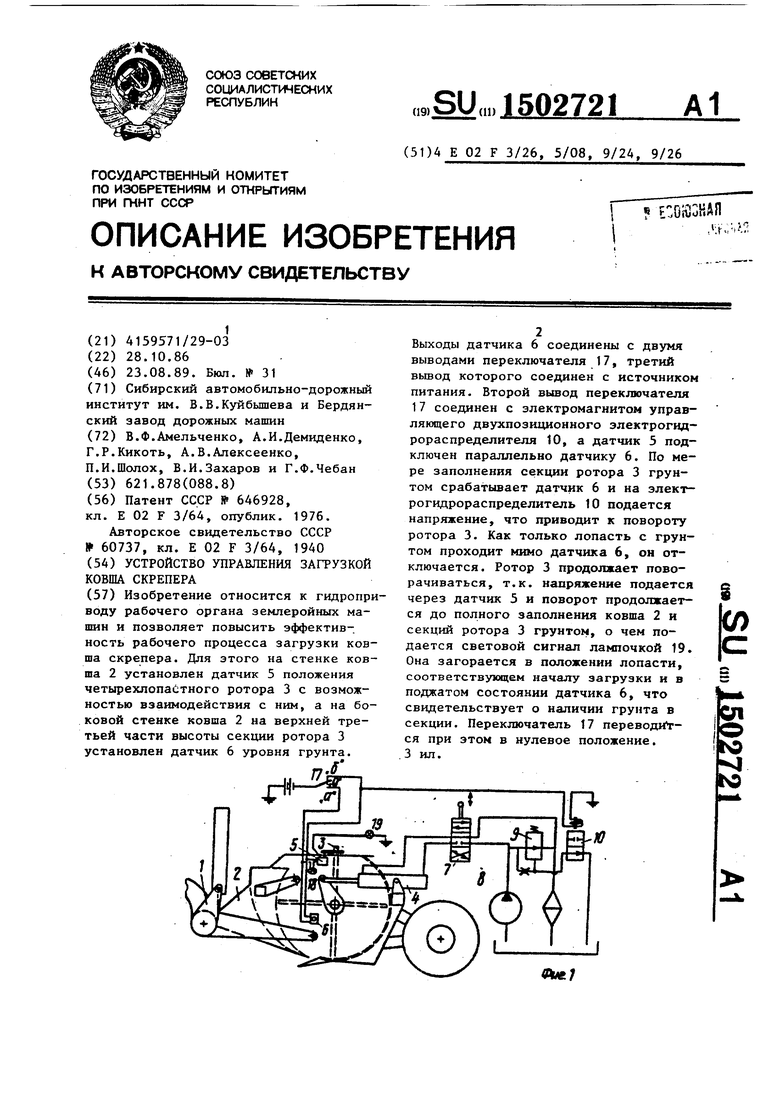
J6
Фиг.
| Автоматическая система управления работой скрепера | 1976 |
|
SU646928A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Колесный скрепер | 1940 |
|
SU60737A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
