.4
4 4
00
Фиг.1
Изобретение относится к строительно-дорожным машинам и может быть использовано на скреперах, экскаваторах, погрузчиках и других землеройных машинах.
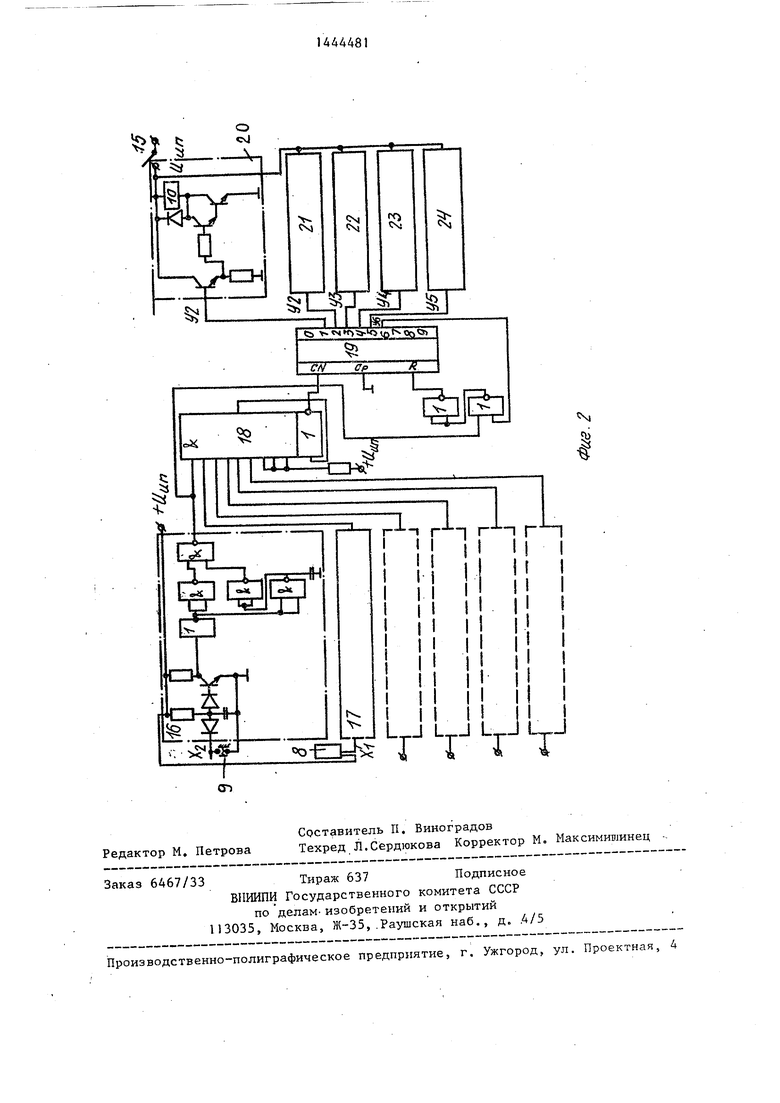
Цель изобретения - повьппение производительности скрепера за счет сокрап;ения времени р.азгрузки ковша. . На фиг, 1 изображена гидравлическая схема скрепера; на фиг, 2 - схема блока управления.
Система автоматического управления процессом разгрузки ковша скрепера состоит из гидронасосов 1, гидравлически соединенных с гидрорас- . пределителем 2 с ручным управлением, выход которого связан с гидрораспределителем .3 с электромагнитным управлением; исполнительных гидроцилинд- ров 4 - 6, гидравлически соединенных с соответствующими секциями гидрораспределителей 2 и 3; блок 7 управления, вход которого электрически соединен с выходом датчика 8 давления, причем последний гидравлически связа с напорной магистралью гидросистемы; кнопки 9 запуска, электромагнитов 10 - 14, которые электрически соединены с вьтходами блока 7 управления и кинематически связаны с соответствующими секциями гидрораспределителя 3; переключателя 15 режимов работы, блоков 16 и 17 формирования импульсов, причем вход первого из Них электрически связан с кнопкой 9 запуска, вход второго - с датчиком 8 давления, а выходы связаны с входом логического элемента 18, выход которого электрически соединен с входом счетчика 19 импульсов, а выходы счетчика импульсов связаны с вхо- , дами усилительных блоков 20 - 24, соответствующие выходы которых электрически соединены с электромагнитами 10-14.
Система автоматического управления работает следующим образом.
После установки ковша на требуемую величину отсыпки грунта оператор устанавливает переключатель 15 режимов работы в положение Авт и затем нажимает на кнопку 9 запуска. Импульс от кйопки 9 через блок 15 формирования импульсов поступает на логический элемент 18, одновр(г менно производя установку счетчика 19 в нулевое состояние. Затем с инк.;рсного выхода элемента 18
0
5
0 5
0
0
5
0
5
5
сигнал уровня. 1 поступает на вход счетчика 9 импульсов, который выра-, батывает сигнал управления на усилительно-преобразовательный блок 20, В результате срабатывает электромагнит 10 гидрораспределителя 3, Рабочая жидкость от насосов 1 через гидрораспределители 2 и 3 поступает на гидроцилиндры 5, осуществляя тем самым подъем заслонки ковша, В момент, когда заслонка достигает крайнего верхнего положения, давление в гидросистеме увеличивается. Это увеличение давления фиксируется датчиком 8 давления. Датчик давления подает импульс на блок 17 формирования импульсов, в результате чего после поступления на счетчик 19 импульсов второго импульса он вырабатывает сигнал на вход усилительно- преобразовательного блока 21, В результате включается электромагнит i1 гидрораспределителя 3 и рабочая жидкость подается к гидроцилиндрам 6 управления задней стенки, В момент, .когда задняя стенка (при выдвижении) достигает твоего крайнего положения, давление в гидросистеме повышается, срабатывает датчик В давления и аналогичным образом на счетчик 19 импульсов поступает третий управляющий импульс, В результате сигнал управления с выхода счетчика 19 импульсов поступает на усилительно-преобразовательный блок 22э срабатывает электромагнит 12., осу1дествляя тем самым установку ковша в транспортное положение. Когда ковш достигает своего верхнего крайнего положения, датчик 8 давления выдает импульс на блок 7 управления, счетчик 19 импульсов которого выдает сигнал управления на усилительный блок 23 и, следовательно, на электромагнит 13, в результате чего происходит опускание заслонки. После опускания заслонки -аналогичным образом происходит возврат задней стенки. При достижении задней стенки крайнего положения в результате повышения давления в гидросистеме на выходе счетчика 19 импульсов появится сигнал, установит счетчик импульсов в нулевое состояние ,
Если при выдвижении задней стенки необходимо прервать автоматический режим работы, переехать на другое место для отсьшки грунта, оператор
устанавливает переключатель 15 ре- жимов работы в положение Ручн, в результате электромагниты будут обесточены, а сигнал управления сохранен в памяти счетчика импульсов При возврате переключателя в положение Авт автоматический режим работы возобновляется с той операции, на которой он прерван.
Предлагаемая система автоматического управления процессом разгрузки ковша скрепера позволяет, сократить время цикла разгрузки ковша и установки его в транспортное положение, облегчить условия труда оператора и в конечном счете увеличить производительность машины.
Формула изобретения
Система автоматического управления процессом разгрузки ковша скрепера, содержащая гидронасосы, подключенные через три гидрораспределителя с ручИьм управлением.к гидроцилиндрам ковша скрепера, и источник питания, отличающаяся тем, что, с целью повышения производительности скрепера за счет сокращения времени разгрузки ковша, система управления снабжена датчиком давления, перек1дачателем режима работы, тремя электрогидрораспределителями, шестью блоками формирования импульсов, кнопкой .запуска, логическим элементом И-ИЛИ-НК, двумя логическими
10
44A81
элементами ИЛИ-НЕ, счетчиком импульсов и пятью усилительными блоками, выходы которых подключены к электромагнитам электрогидрораспределите- лей, а отрицательная пшна источника питания через переключатель режима работы подключена к положительной шине усилительных блоков, а положительная шина источника питания через кнопку запуска подключена к входу первого блока формирования импульсов, выход которого подключен к первым входам логического элемента И- 15 ИЛИ-НЕ и к первому входу первого элемента -ЯПИ-НЕ, к входу второго входа подключен датчик давления, а выход второго блока подсоединен к второму входу логического элемента И-ИЛИ-НЕ, к третьему, четвертому, пятому и шестому входам которого подключены соответственно третий,, четвертый, пятый и шестой блоки формирования
20
импульсов, а выход логического эле- мента ИЛИ-НЕ подключены к первому входу счетчика импульсов, второй вход которого заземлен, а к третьему входу подключен выход второго логического элемента ИЛИ-НЕ, а первый, второй, третий, четвертый и пятый выходы счетчика подключены соответственно к входам усилительных блоков, а шестой выход счетчика импульсов подключен к второму входу первого логического элемента ИЛИ-НЕ, выход которого подключен к входу второго элемента ИЛИ-НЕ,
csil 5 1 -34 Vft
1 1 { HRl
Nl
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического управления процессом разгрузки ковша скрепера | 1987 |
|
SU1448000A1 |
| Устройство управления гидросистемой скрепера | 1988 |
|
SU1629424A1 |
| Устройство автоматического управления рабочим оборудованием погрузчика | 1988 |
|
SU1565981A1 |
| Гидропривод самоходного скрепера | 1988 |
|
SU1743966A1 |
| ГИДРОСИСТЕМА | 1996 |
|
RU2103565C1 |
| Устройство управления формовочным прессом | 1985 |
|
SU1268435A1 |
| Устройство управления ковшом скрепера | 1988 |
|
SU1694798A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для управления дозатором сыпучих компонентов стекольной шихты | 1986 |
|
SU1321699A1 |
| Гидропривод землеройной машины | 1989 |
|
SU1661304A1 |
Изобретение относится к строительно-дорожным машинам. Цель изобретения - повышение производительности скрепера за счет сокращения времени разгрузки ковша. Для этого устройство имеет датчик 8 давления, переключатель 15 режима работы, три электродораспределителя и блок 7 управления, состоящий из формирователя импульсов, счетчика импульсов, выход которого связан с блоками усиления, выходы которых подключены к электромагнитам 10-14. После установки переключателя 15 в автоматический режим по сигналу с датчика 8 давления блок 7 осуществляет последовательно подъем заслонки ковша, управление его задней стенкой, установку ковша в транспортное положение и опускание заслонки. 2 ил. (Л
Ni
JL | -1--п|f mA,
Г « г n Г
III
t i III
i I i |l I
III II) i t i
III I i™J
4 A i
| Самоходные колесные скреперы и земле возы/ Под ред | |||
| Д.И.Плешкова | |||
| М.: Машиностроение, 1970, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
