Изобретение относится к обработке металлов давлением и может быть использовано в многопозиционных высадочных автоматах, изготавливаювщх крепежные детали.
Цель изобретения - повьшение производительности и надежности путем обеспечения в процессе работы пружинам величины натяжения, близкой к постоянной.
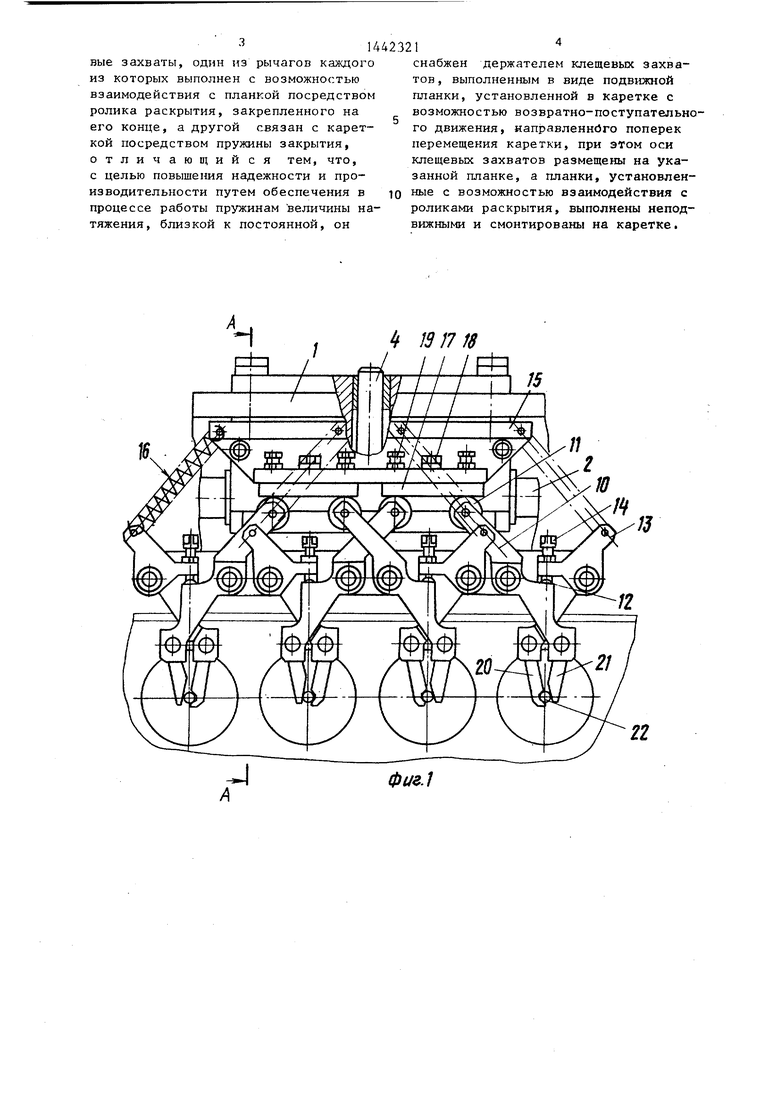
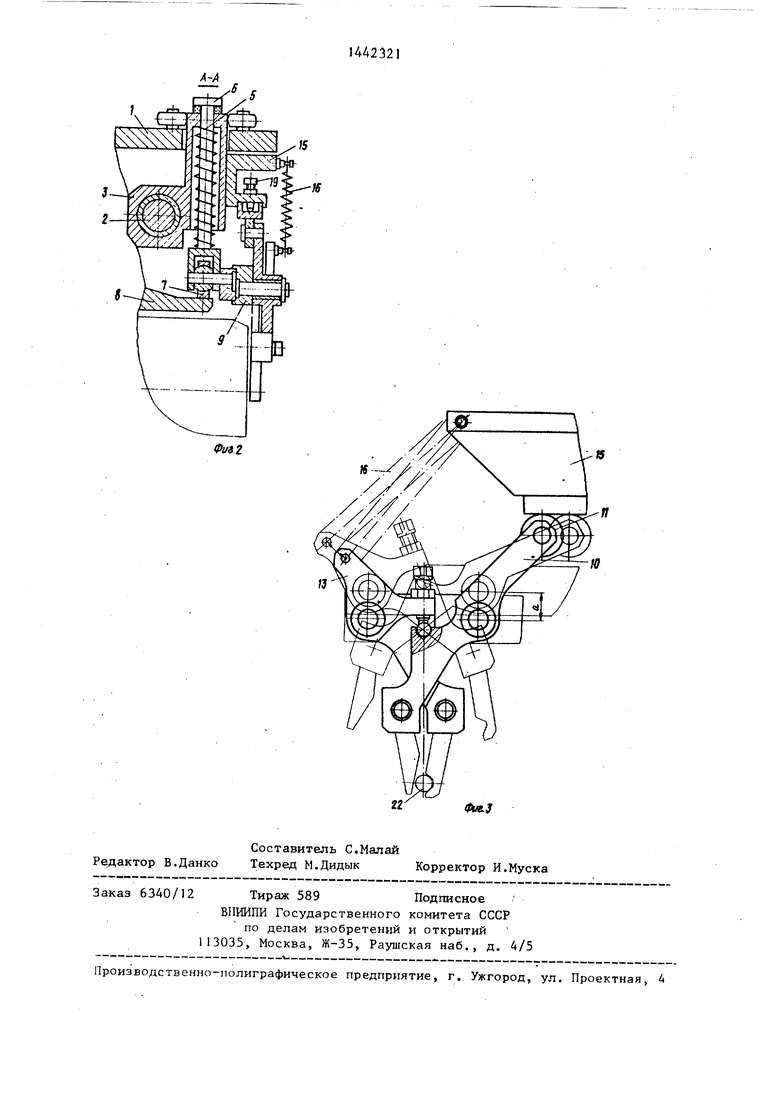
На фиг,1 изображен механизм переноса, общий вид; на фиг.2 - разрез А-А на фиг.; на фиг.З - клещевые захваты в двух положениях.
Механизм переноса многопозиционного высадочного автомата состоит из корпуса 1 с установленной в нем направляющей 2, на которой установлена каретка 3, в которой с возможностью вертикального перемещения расположена штанга 4, пружины 5 сжатия надеты на штоки 6 и постоянно прижимают ролики 7 подъема, установленные на 1пто ках 6 к рычагу 8 подъема и планки 9, установленной на штоках 6 и штанге 4 На планке 9 расположены управляющие рычаги 10 с роликами 11 и упорами J2 и управляемые рычаги 13 с упорными винтами 14, кронштейн J5 неподвижно установлен на каретке 3, пружины 16 прикреплены одним концом к кронштейну 15, другим - к концу рычагов 13 с натяжением, близким к постоянному в процессе работы, .а так как пружины - не жесткая деталь, то она компенсирует зазоры в сочленениях механизма, ролики 11 поджимаются к планкам 17, закрепленным винтовым соединением 18 на кронштейне 15, настройка на калибр заготовки рычагов 10 обеспечивается перемещением планки 17, вращением упорных винтов 19, положение рычагов 13 регулируется вращением упорных винтов 14, рычаги 10 и 13 клещевых захватов зажимают губками 20 и 21 заготовку 22.
Механизм переноса работает следующим образом.
В момент захвата вытолкнутой из матрицы заготовки 22 рычаг 8 подъема движется вниз на величину а под действием кулака привода раскрытия клещей (не показан), планка 9 с клещевыми захватами опускается в нижнее положение под действием пружин 5, заготовка зажимается губками 20 и 2 рычагов 13 и 10 под действием пружин 16, передающих свое усилие через ры
5
0
5
чаги 13, винты 14 и упоры 12 на рычаги 10.
Затем каретка 3 с установленными на ней планкой 9 с клещевыми захватами и кронштейном 15 перемещаются в рабочее положение на величину, равную расстоянию между матрицами.
Пары рычагов 10 и 13 переносят заготовки на следующую штамповочную позицию. После остановки каретки 3 рычаг 8 подъема поднимает вверх ролики 7 подъема со штоками 6, пружинами 5 и установленной на штоках 6 йлан- кой 9 с рычагами 10 и 13.
Ролики 11, упираясь в планки 17, поворачивают рычаги 10, которые посредством воздействия упоров 12 на винты 14 поворачивают рычаги 13, губки 20 и 21 освобождают заготовки.
Далее каретка с кронштейном 15 и планкой 9 с раскрытыми рычагами 10 и 13 возвращается в исходное положение. Затем цикл работы механизма переноса повторяется.
Во время раскрытия рычагов 10 и 13 точка крешгекия пружин 16 к кронштейну 15 остается неподвижной, а точка крепления к рычагам 13 относительно точки крепления к кронштейну 15 совершает одновременно два движения: вниз по дуге совместно с рычагом 13 относительно центра вращения оси крепления рычага 13 и вверх совместно с поднимающимися рычагами клещевых захватов.
В зависимости от величин подъема а и плеч рычагов 10 и 13 эти два движения в процессе работы гасят одно другое и пружина 16 практически не растягивается во время раскрытия и закрытия рычагов 10 и 13, а только поворачивается вокруг верхней точки ее крепления к кронштейну 15. Это 5 увеличивает надежность работы механизма переноса, исключает полиостью вибрацию пружин 16, а вместе с ними и рычагов 10 и 13 при захвате и переносе, что повышает производительность и надежность работы автомата за счет стабильности удержания заготовки.
0
5
0
0
Формула изобретения
Механизм переноса миогопозиционно- го высадочного автомата, содержащий смонтированную в кррпусе подвижную каретку, установленные на осях клещевые захваты, один из рычагов каждого из которых выполнен с возможностью взаимодействия с планкой посредством ролика раскрытия, закрепленного на его конце, а другой связан с кареткой посредством пружины закрытия, отличаю П1ийся тем, что, с целью повышения надежности и производительности путем обеспечения в процессе работы пружинам величины натяжения, близкой к постоянной, он
снабжен держателем клещевых захватов , выполненным в виде подвижной планки, установленной в каретке с возможностью возвратно-поступательного движения, направленнбго поперек перемещения каретки, при этом оси клещевых захватов размещены на указанной планке, а планки, установленные с возможностью взаимодействия с роликами раскрытия, выполнены неподвижными и смонтированы на каретке
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство переноса заготовок к многопозиционным штамповочным автоматам | 1988 |
|
SU1503969A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1976 |
|
SU647053A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| Автомат для изготовления деталей из ленточного материала | 1988 |
|
SU1634352A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в многопозиционных высадочных автоматах, изготавливающих крепежные детали. Цель - повьппение надежности и производительности путем обеспечения в процессе работы пружинам величины натяжения, близкой к постоянной. Механизм переноса содержит каретку, в которой установлена подвижная планка с рычагами клещевых захватов. Один из рычагов выполнен с возможностью взаимодействия с неподвижной планкой посредством ролика раскрытия, другой связан с кареткой посредством пружины закрытия. При движении вниз рычага подъема ная планка с клещевыми захватами опускается. При этом заготовки зажимаются рычагами клещевых захватов. Каретка перемещается и заготовки переносятся на следующую штамповочную позицию. Во время раскрытия и закрытия рычагов пружины практически не растягиваются, а только поворачиваются вокруг верхних точек их крепления к каретке. Этим исключается вибрация пружин и достигается стабильность удержания заготовок в клещевых захватах. 3 ил. с S (Л
19 Л 18
LLI
22
Ш/
Фие.3
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
