14
а
f
сл
о 4
о
4
СО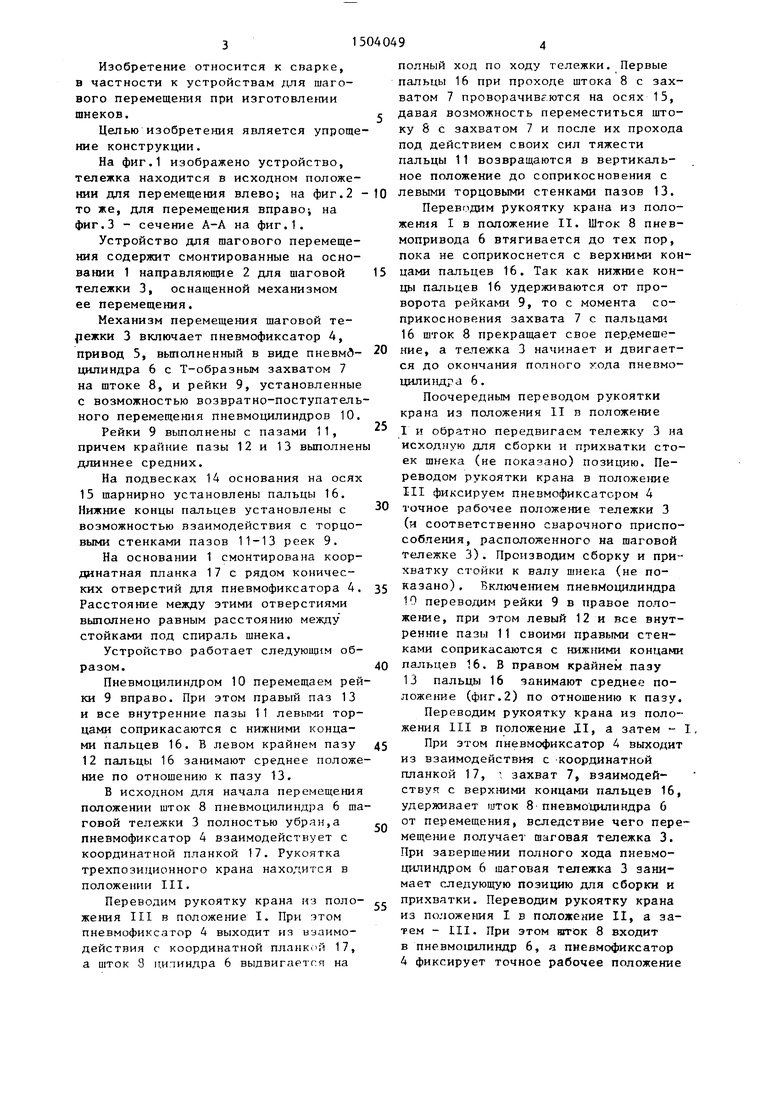
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового перемещения | 1978 |
|
SU774732A1 |
| УСТРОЙСТВО для СБОРКИ и СВАРКИ КОНВЕЙЕРНЫХ ПОПЕРЕЧИН | 1967 |
|
SU191709A1 |
| Автомат для изготовления проволочных решеток | 1985 |
|
SU1289642A1 |
| УСТРОЙСТВО ДЛЯ МНОГОТОЧЕЧНОЙ КОНТАКТНОЙ СВАРКИ ПРОСТРАНСТВЕННЫХ КАРКАСОВ | 1971 |
|
SU317478A1 |
| Устройство для маркировки плоских изделий | 1981 |
|
SU1066838A1 |
| Автоподатчик для бурильныхМАшиН | 1974 |
|
SU796410A1 |
| Устройство для сборки под сварку труб с криволинейными лопатками | 1987 |
|
SU1447629A1 |
| Машина для контактной точечной сварки арматурных изделий | 1976 |
|
SU611706A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Устройство для подачи обрезиненного корда на сборочный барабан | 1985 |
|
SU1273326A1 |
Изобретение относится к сварке , в частности, к устройствам для шагового перемещения при изготовлении шнеков. Цель изобретения - упрощение конструкции и повышение точности шагового перемещения. Устройство содержит шарнирно закрепленные на направляющих 2 пальцы 16. Под направляющими 2 закреплены с возможностью возвратно-поступательного перемещения рейки 9 с пазами 11,12,13 для пальцев 16. В направляющих 2 установлена шаговая тележка 3 с пневмофиксатором 4 и пневмоцилиндром 6 с захватом 7 на его штоке 8. Для перемещения тележки 3 рейки 9 перемещают вправо. При выдвижении штока 8 захват 7 отклоняет пальцы 16, которые занимают вертикальное положение. При втягивании штока 8 захват 7 упирается в пальцы 16 и шаговая тележка 3 перемещается. На рабочей позиции тележка 3 фиксируется пневмофиксатором 4. Для обратного перемещения рейки 9 перемещают влево. Для фиксации начала и конца движения тележки 3 крайние пазы 12 и 13 выполнены длиннее средних пазов 11. 1 з.п. ф-лы, 3 ил.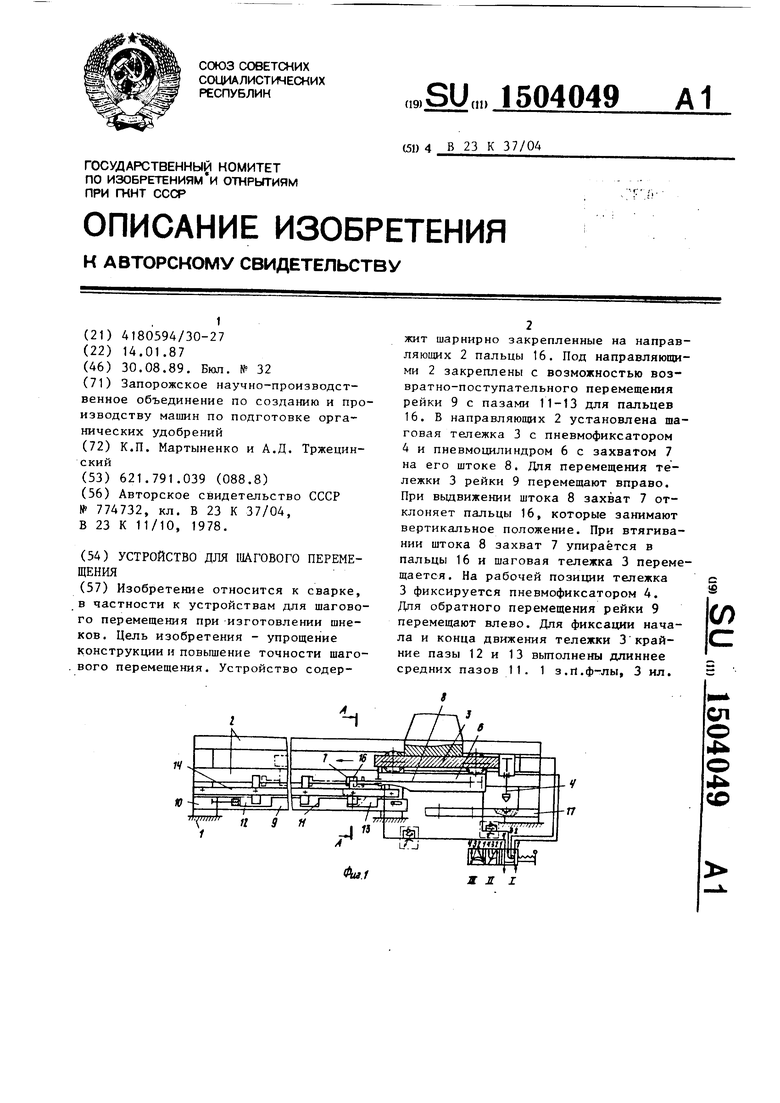
Я Ж I
Изобретение относится к сварке, в частности к устройствам для шагового перемещения при изготовлении шнеков.
Целью изобретения является упрощение конструкции.
На фиг.1 изображено устройство, тележка находится в исходном положеНИИ дпя перемещения влево; на фиг.2 -10 левыми торцовыми стенками пазов 13.
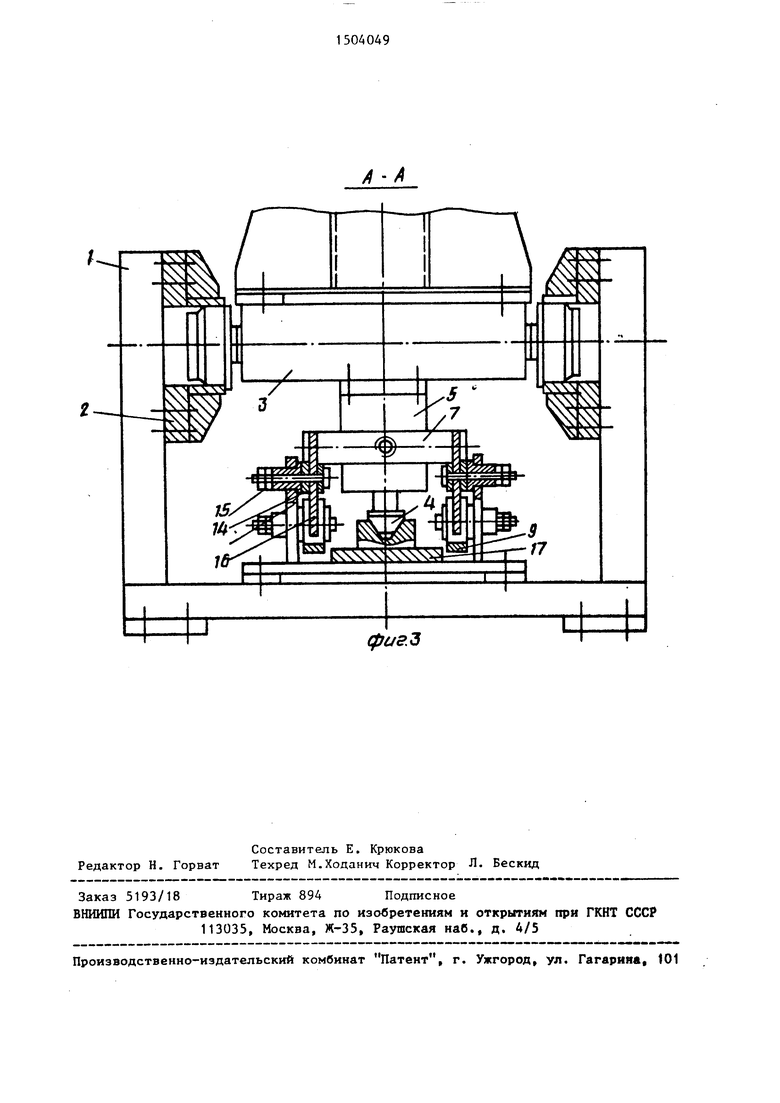
то же, для перемещения вправо; на фиг.З - сечение А-А на фиг.1.
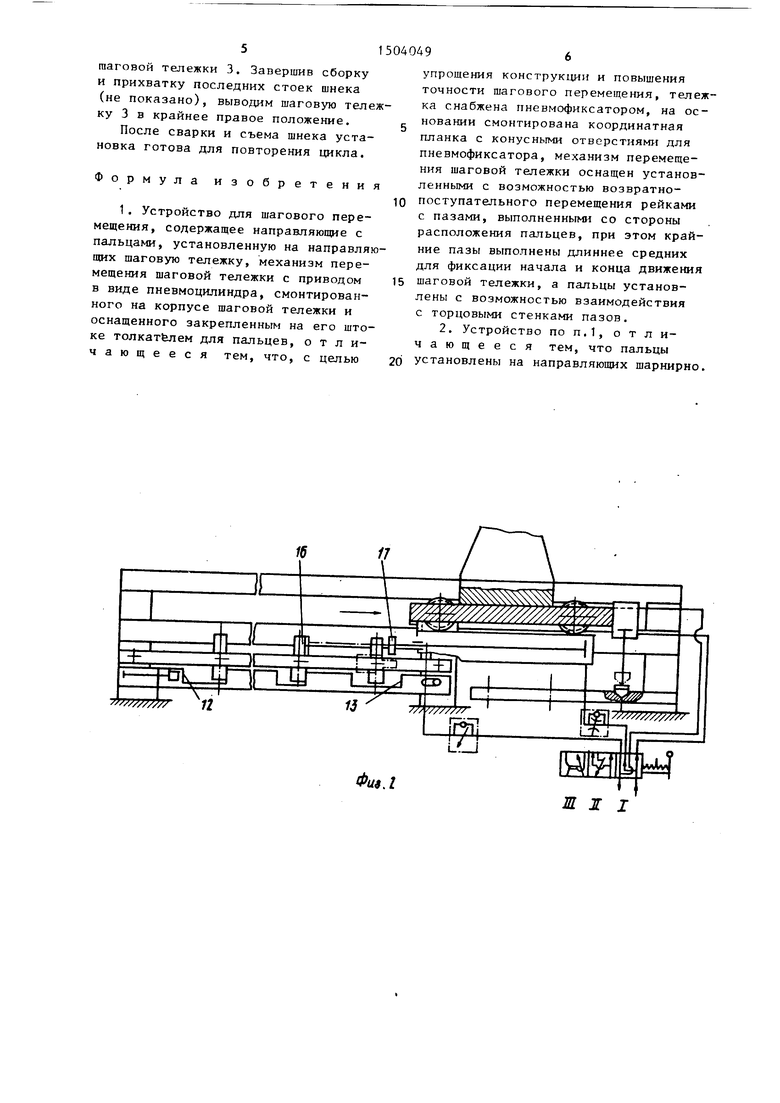
Устройство для щагового перемещения содержит смонтированные на основании 1 направляющие 2 для шаговой тележки 3, оснащенной механизмом ее перемещения.
Механизм перемещения щаговой те- {1ежки 3 включает пневмофиксатор 4, привод 5, вьшолненный в виде пневмД- цилиндра 6 с Т-образным захватом 7 на штоке 8, и рейки 9, установленные с возможностью возвратно-поступательного перемещения пневмоцилиндров 10.
Рейки 9 выполнены с пазами 11, причем крайние пазы 12 и 13 выполнен длиннее средних.
На подвесках 14 основания на осях 15 шарнирно установлены пальцы 16. Нижние концы пальцев установлены с возможностью взаимодействия с торцовыми стенками пазов 11-13 реек 9.
На основании 1 смонтирована координатная планка 17 с рядом конических отверстий дпя пневмофиксатора 4. Расстояние между этими отверстиями выполнено равным расстоянию между стойками под спираль щнека.
Устройство работает следующим образом.
Пневмоцилиндром 10 перемещаем рейки 9 вправо. При этом правый паз 13 и все внутренние пазы 11 левыми торцами соприкасаются с нижними концами пальцев 16. В левом крайнем пазу 12 пальцы 16 занимают среднее положение по отношению к пазу 13.
В исходном для начала перемещения положении шток 8 пневмоцилиндра 6 шаговой тележки 3 полностью убран,а пневмофиксатор 4 взаимодействует с координатной планкой 17. Рукоятка трехпозиционного крана в положении III.
Переводим рукоятку крана из положения III в положение I. При этом пневмофиксатор 4 выходит из взаимодействия с координатной планкой 17, а шток 3 цилиндра 6 выдвигается на
полный ход по ходу тележки. Первые пальцы 16 при проходе штока 8 с захватом 7 проворачиваются на осях 15, давая возможность переместиться штоку 8 с захватом 7 и после их прохода под действием своих сил тяжести пальцы 11 возвращаются в вертикальное положение до соприкосновения с
5
0
5
0
5
5
0
0
5
Переводим рукоятку крана из положения I в положение II. Шток 8 пневмопривода 6 втягивается до тех пор, пока не соприкоснется с верхними концами пальцев 16. Так как нижние концы пальцев 16 удерживаются от про- ворота рейками 9, то с момента соприкосновения захвата 7 с пальцами 16 шток 8 прекращает свое пер.меше- ние, а тапежка 3 начинает и двигается до окончания полного хода пневмоцилиндра 6.
Поочередным переводом рукоятки крана из положения II и положение I и обратно передвигаем тележку 3 на исходную для сборки и прихватки стоек шнека (не показано) позицию. Переводом рукоятки крана в положение III фиксируем пневмофиксатором 4 точное рабочее положение тележки 3 (и соответственно сварочного приспособления, расположенного на шаговой тележке 3). Производим сборку и прихватку стойки к валу шнека (не показано) . Включением пневмоцилиндра 10 переводим рейки 9 в правое положение, при этом левый 12 и все внутренние пазы 11 своими правыми стенками соприкасаются с нижними концами пальцев 16. В правом крайнем пазу 13 пальцы 16 занимают среднее положение (фиг.2) по отношению к пазу.
Переводим рукоятку крана из положения III в положение Л, а затем - 1,
При этом пневмофиксатор 4 выходит из взаимодействия с координатной планкой 17, : захват 7, взаимодействуя с верхними концами пальцев 16, удерживает шток 8 пневмоцилиндра б от перемещения, вследствие чего перемещение получает шаговая тележка 3. При завершении полного хода пневмо- цилиндром 6 шаговая тележка 3 занимает следующую позицию для сборки и прихватки. Переводим рукоятку крана из положения I в положение II, а затем - III. При этом шток 8 входит в пневмоцилиндр 6, а пневмофиксатор 4 фиксирует точное рабочее положение
гааговой тележки 3. Завершив сборку и прихватку последних стоек шнека (не показано), выводим шаговую тележку 3 в крайнее правое положение.
После сварки и съема шнека установка готова для повторения цикла.
Формула изобретения
16
У
-рЦ- ///////// 12
тек
упрощения конструкции и повышения точности шагового перемещения, тележка снабжена пневмофиксатором, на основании смонтирована координатная планка с конусными отверстиями для пневмофиксатора, механизм перемещения шаговой тележки оснащен установленными с возможностью возвратнопоступательного перемещения рейками с пазами, выполненными со стороны расположения пальцев, при этом крайние пазы выполнены длиннее средних для фиксации начала и конца движения
шаговой тележки, а пальцы установлены с возможностью взаимодействия с торцовыми стенками пазов.
77/
/////
ю
.l
т ж I
/-/4
фс/г.З
| Устройство для шагового перемещения | 1978 |
|
SU774732A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
