(Л
ел
о
4 4
СО 05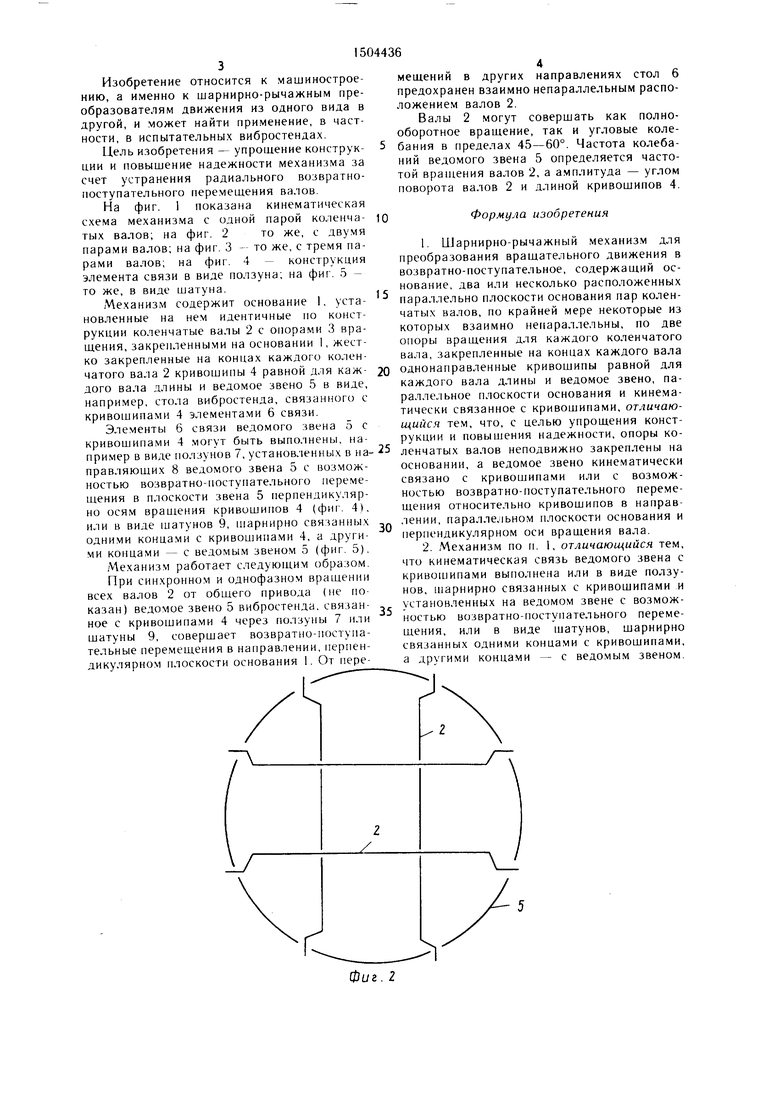
Изобретение относится к шарнирно-рычажным преобразователям движения и может найти применение , в частности, в испытательных вибростендах. Цель изобретения - упрощение конструкции и повышение надежности механизма за счет устранения радиального возвратно-поступательного перемещения валов. При синхронном и однофазном вращении коленчатых валов 2 ведомое звено 5 вибростенда, связанное с кривошипами 4 через ползуны 7 или шатуны, совершает колебания в плоскости, перпендикулярной плоскости основания 1. 5 ил.
Фиг. /
Изобретение относится к машиностроению, а именно к шарнирно-рычажным преобразователям движения из одного вида в другой, и может найти применение, в частности, в испытательных вибростендах.
Цель изобретения - упрощение конструкции и повышение надежности механизма за счет устранения радиального возвратно- поступательного перемещения валов.
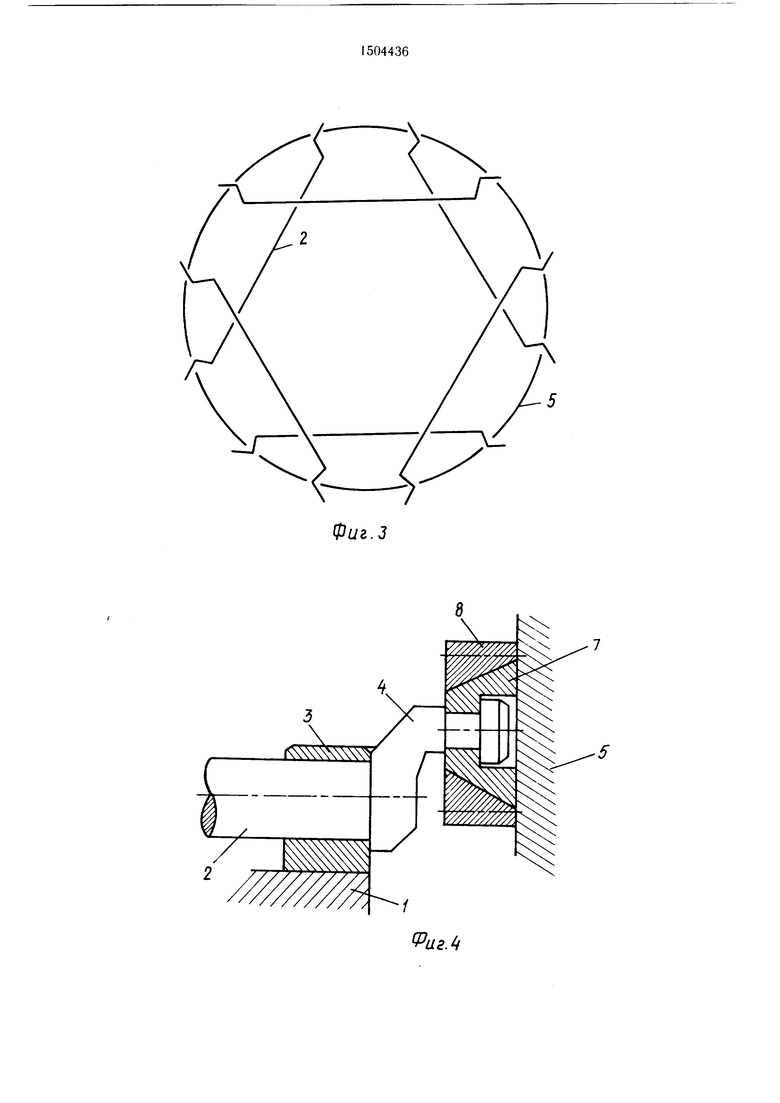
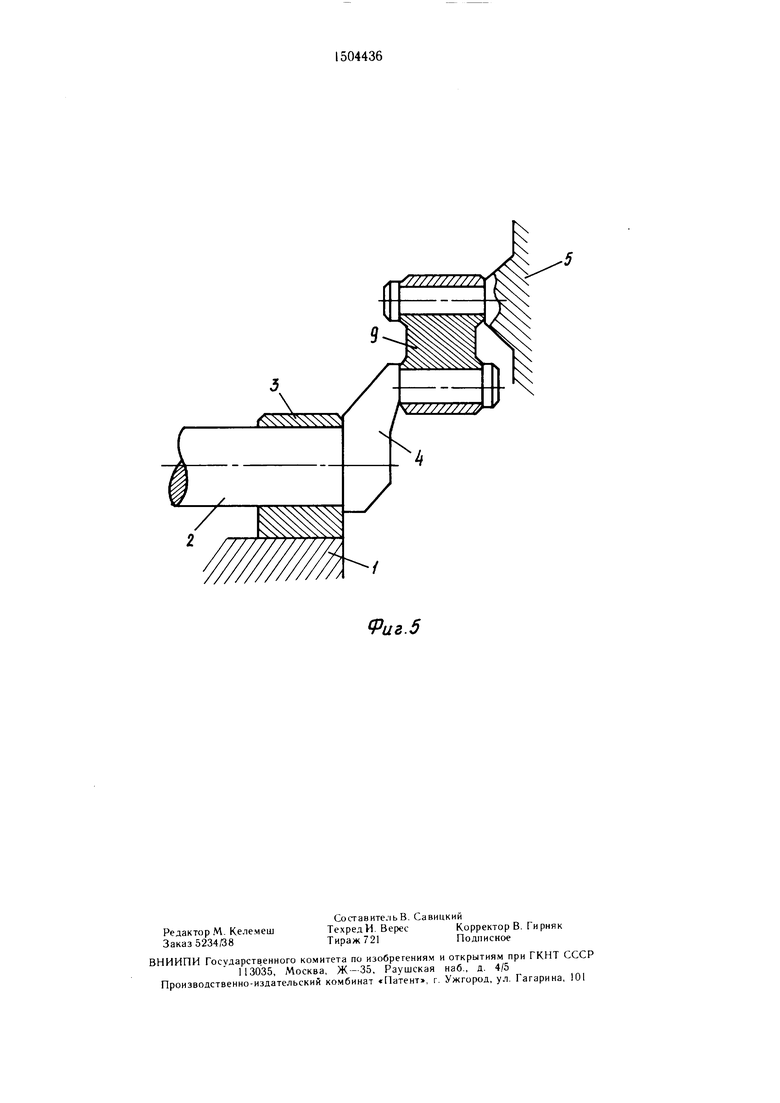
На фиг. 1 показана кинематическая схема механизма с одной парой коленча- Ю тых валов; на фиг. 2 то же, с двумя парами валов; на фиг. 3 - то же, с тремя парами валов; на фиг. 4 - конструк ция элемента связи в виде ползуна; на фиг. 5 - то же, в виде шатуна
мещений в других направлениях стол 6 предохранен взаимно непараллельным расположением валов 2.
Валы 2 могут совершать как полнооборотное вращение, так и угловые коле- 5 бания в пределах 45-60°. Частота колебаний ведомого звена 5 определяется частотой вращения валов 2, а амплитуда - углом поворота валов 2 и длиной кривощипов 4.
Формула изобретения
же в виде шатунанование, два и.ш нс лилоли .
Механизм содержит основание I, уста- параллельно плоскости основания пар колен- новленные на нем идентичные по конст-чатых валов, по крайней мере некоторые из
рукции коленчатые валы 2 с опорами 3 вращения, закрепленными на основании 1, жестко закрепленные на концах каждого коленкоторых взаимно непараллельны, по две опоры вращения для каждого коленчатого
KU .-,.H«D.c п. .,,. ..„....,.. вала, закрепленные на концах каждого вала
чатого Baia 2 кривошипы 4 равной для каж- 20однонаправленные кривошипы равной для дого Baia дтины и ведомое звено 5 в виде,каждого вала длины и ведомое звено, па- например стола вибростенда, связанного сраллельное плоскости основания и кинема- кривощипами 4 элементами 6 связи.тически связанное с кривошипами, отлинаю- Элементы 6 связи ведомого звена 5 сщийся тем, что, с целью упрощения конст- кривошипами 4 могут быть выполнены, на-рукции и повышения надежности, опоры ко- пример в виде попунов 7, установленных в на- 25ленчатых валов неподвижно закреплены на пг)ав1яюших 8 ведомого звена 5 с возмож-основании, а ведомое звено кинематически ностью возвратно-поступательного переме-связано с кривошипами или с возмож- щения в плоскости звена 5 перпендикуляр-ностью возвратно-поступательного переме- но осям вращения кривошипов 4 (фиг. 4).щения относительно кривошипов в направили в виае шатунов 9, шарнирно связанных ,„лении, параллельном плоскости основания и одними концами с кривошипами 4, а други- перпендикулярном оси
кривошипами 4, а други ми концами - с ведомым звеном 5 (фиг. 5).
Механизм работает следующим образом.
При синхронном и однофазном вращении всех валов 2 от общего привода (не показан) ведомое звено 5 вибростенда, связанное с кривощипами 4 через ползуны 7 или шатуны 9, совершает возвратно-поступательные перемещения в направлении, перпендикулярном плоскости основания 1. От пере
35
перпендикулярном оси вращения вала.
Фиг. 2
мещений в других направлениях стол 6 предохранен взаимно непараллельным расположением валов 2.
Валы 2 могут совершать как полнооборотное вращение, так и угловые коле- бания в пределах 45-60°. Частота колебаний ведомого звена 5 определяется частотой вращения валов 2, а амплитуда - углом поворота валов 2 и длиной кривощипов 4.
Формула изобретения
нование, два и.ш нс лилоли .
параллельно плоскости основания пар колен- чатых валов, по крайней мере некоторые из
20однонаправленные кривошипы равной для каждого вала длины и ведомое звено, па- раллельное плоскости основания и кинема- тически связанное с кривошипами, отлинаю- щийся тем, что, с целью упрощения конст- рукции и повышения надежности, опоры ко- 25ленчатых валов неподвижно закреплены на основании, а ведомое звено кинематически связано с кривошипами или с возмож- ностью возвратно-поступательного переме- щения относительно кривошипов в направ,„лении, параллельном плоскости основания и перпендикулярном оси
35
перпендикулярном оси вращения вала.
Фиг.З
аг.
Риг.б
| Шарнирно-рычажный механизм для преобразования вращательного движения в возвратно-поступательное | 1985 |
|
SU1281789A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
