фl/г.S
Изобретение относится к маиино- строению и может быть использовано в транспортно-иакопительных системах гибких переналаживаемых производственных комплексов из станков с ЧПУ.
Целью изобретения является расширение технологических РОЭМОЖНО- стей за счет обеспечения более плавной передачи кассеты с заготовками.
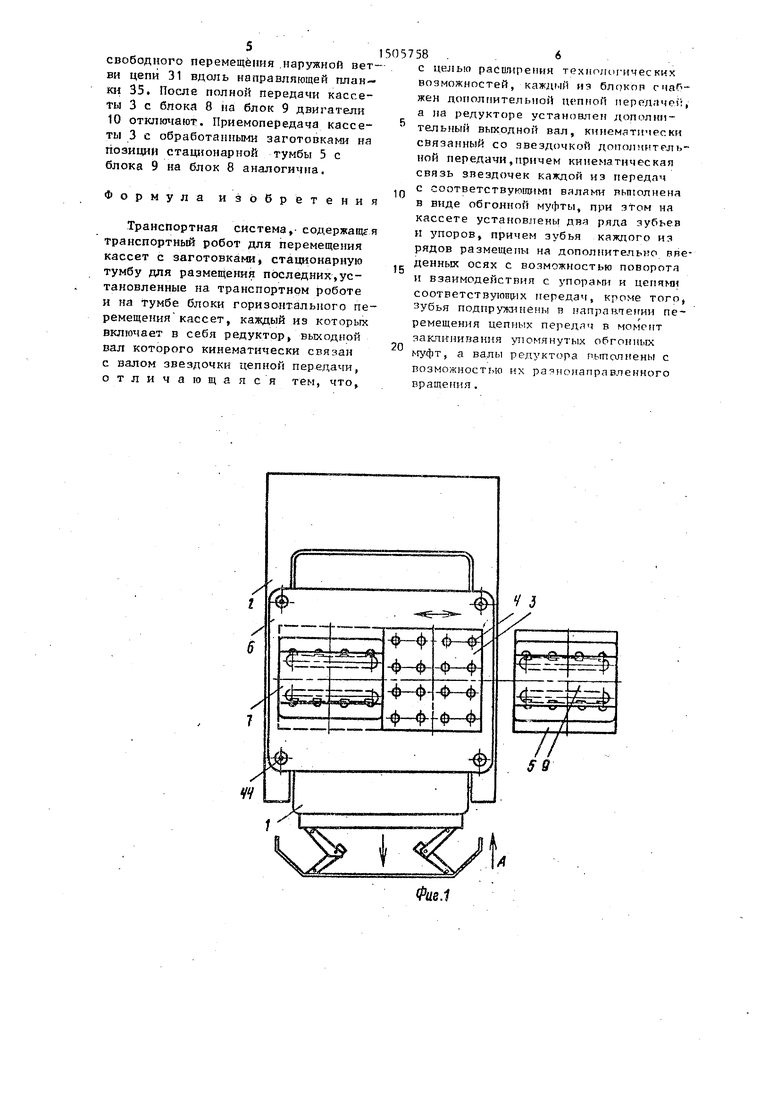
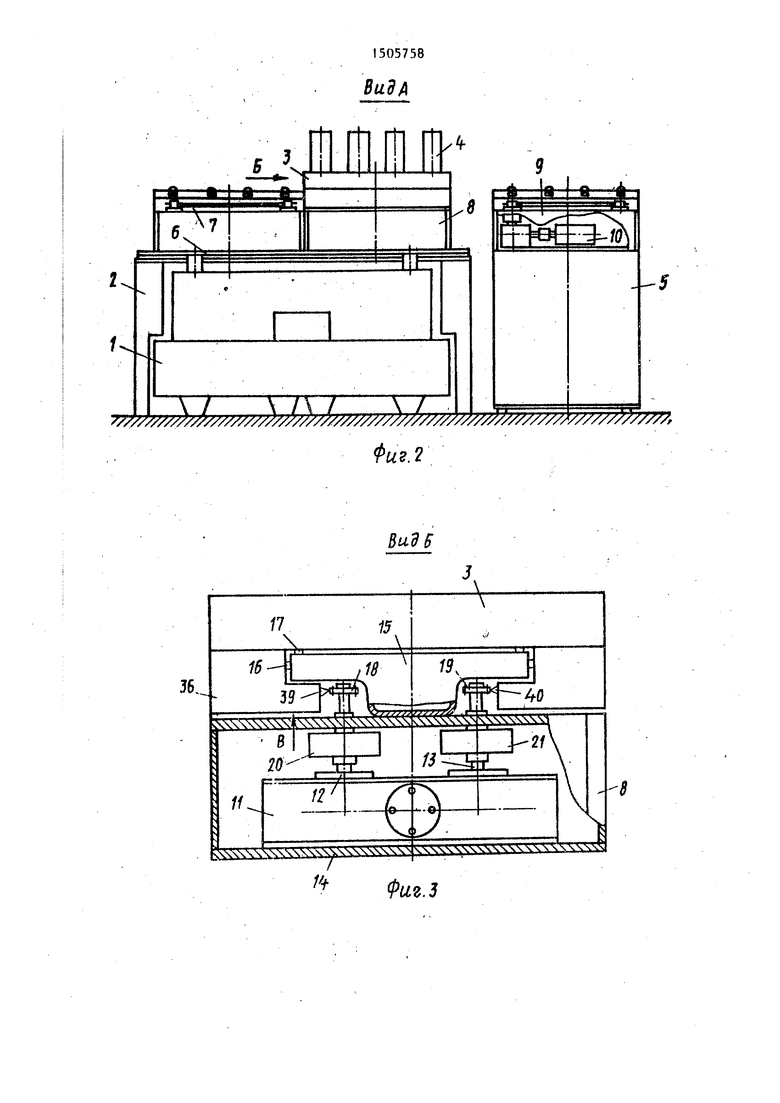
На фиг.1 изображено устройство, обпщй вид сверху; на фиг.2 - вид А на фиг.1; на фиг.З, - вид Б на фиг.2; на фиг.4 - вид В на фиг.З; на фиг.5 - разрез Г-Г на.фиг.4; на фиг.6 - схема работы блока горизонтального перемещения.
Транспортная система для кассет с заготовками содержит транспортный робот 1, порт 2 приемопередачи, кассеты 3 с заготовками 4 и стационарную тумбу 5. На последней и на пло- щадке 6 транспортного робота уста- новлены блоки 7-9 горизонтального перемещения.Блоки 7 и 8 предусматривают приемовыдачу кассет 3 по обе стороны от оси транспортного робота. Каждый из блоков горизонтального перемещения содержит двигатель 10, который вращает червяк редуктора 11, передающе- го вращение на два червячных коле- са с выходными валами 12 и 13. На корпус 14 блока установл-ена обойма 15 с опорными роликами 16 и 17 для кассеты 3. Приводные звездочки 18 и 19 установлены в подшипниках на корпусе 14 и связаны с концами выходных валов 12 и 13 через обгонные муфты 20 и 21, передающие вращение в одном направлении.
Каждая обгонная муфта содержит соответственно обойму 22 (23), роик 24 (25) и ступицу 26 (27). Обоймы 22 и 23 жестко закреплены на выходных валах 12 и 13 редуктора 11, а ступицы 26 и 27 с приводными звездочками 18 и 19 шпонками 28 и 29. Цепи 30 и 31 натянуты звездочками 32 и 33 (устройство натяжения не показано), которые вращаются в подшипниках корпуса 14. Наружные ветви цепей 30 и 31 направляются по роликам планками 34 и 35. В основании 36 кассеты 3 закреплены два ряда планок 37,, н прорези которых на оси 38 установлены зубья 39 и 40, которые взаимодействуют с цепями 30 и 31 и упираются боковой поверхностью под ,
1505758
10
15
20
25
30
35
4Q
45
50
55
г
0
5
0
5
0
5
Q
5
0
5
действием пластинчатой пружины 41 в упор 42. Между зубьями 39 и 40 и планкой 37 установлены на осях 38 шайбы 43, обладающие низким коэффициентом трения. Места расположения пружин 41 в каждом ряду зубьев противоположны, а направление усилия пружин совпадает с направлением вращения обгонных муфт в момент заклинивания.
Транспортная Система работает следующим образом.
Вначале загружают площадку 6 с блоками 7 и 8 горизонтального перемещения кассетой 3 с заготовками 4 и транспортируют ее транспортным роботом 1 в порт 2 приемопередачи. Площадку 6 устанавливают на центрирующие пальцы 44. По команде, электродвигатель 10 блока 8 горизонтального перемещения через редуктор 11 передает вращение на обоймы 22 и 23 обгонных муфт 20 и 21. При этом обойма 22 вращается против часовой стрелки, а обойма 23 - по часовой стрелке. Ролик 24 заклинивается в пазу и вращение передается через ступицу 26 на приводную звездочку 18, которая перемещает наружную ветвь цепи 30 вдоль направляйщей планки 34. Цепь 30, находясь в зацеплении с зубьями 39, упирающимися в упоры 42, перемещает кассету 3 в направлении блока 9 горизонтально- го перемещения по опорным роликам 16 и 17. Зубья 40 упираются в упоры 42 и свободно перемещают наружную ветвь цепи 31 вдоль направляющей планки 35, при этом крутящий момент обоймой 23 на ступицу 27 не передается.
По команде до начала зацепления зубьев 39 и 40 с цепями 30 и 31 блока 9 горизонтального перемещения включают привод блока 9 по одинаковой схеме работы блока 8. При этом зубья 39, встречаясь с цепью 30 в случае несоответствия просветов между роликами цепи 30, отжимая пружину 41, поворачиваются на оси 38 и компенсируют рассогласование в шагах цепи 30 в блоках 8 и 9 горизонтального перемещения. Зубья 40, встречаясь с цепью 31, упираются в упор 42 и компенсируют рассогласо- вайИе в шагах цепи 31 блоков 8 и 9 горизонтального перемещения за счет
свободного перемещения .наружной ветви цепи 31 вдоль направлягощен план - Kit 35f После полной передачи кассеты 3 с блока 8 ica блок 9 двигатели 10 отключают. Приемопередача кассеты 3 с обработанными заготовками на позиции стационарной тумбы 5 с блока 9 на блок 8 аналогична.
Формула изобретения
Транспортная система,- содержащгя транспортный робот для перемещения кассет с заготовками, стационарную тумбу для размещения последних,установленные на транспортном роботе и на Тумбе блоки горизо-нтального перемещения кассет, каждый из которьгк включает в себя редуктор, выходной вал которого кинематически связан с валом звездочки цепной передачи, отличающаяся тем, что.
5
10
05758 ..6.
с целью расилфеиия техполиг нческих возможностей, каждмй из гчаб- жен дополнительной перед., а на редукторе установлен дополнительный выходной вал, кинематически связанный со звездочкой дополнительной передачи,причем кинематическая связь звездочек каждой из передач с соответствующим валами вьпюлнена в виде обгонной муфты, при зТом на кассете установленьг двя ряда зубьев и упоров, причем зубья каждого из рядов размещены на дополнительно введенных осях с возможностью поворота и взаимодействия с упорами и цепя№ соответствуюпр.1х передагг, кроме того Зубья подпружи 1ены в 1 апратении перемещения цепных передлч в момент заклинигзания упомянутых обгонных ryфт, а валы редуктора пьтолнены с возможностью их раяно 1апрпвленного вращения.
15
20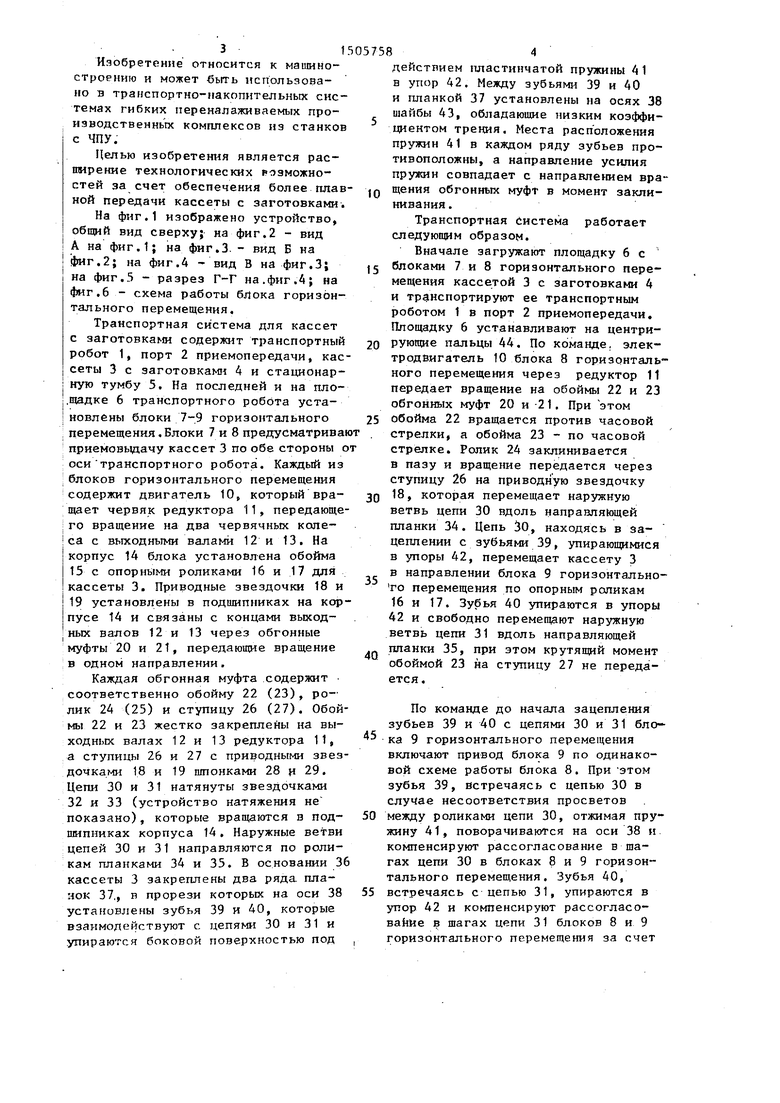
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| Захватное устройство транспортного робота | 1987 |
|
SU1440705A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| Кассета для деталей | 1986 |
|
SU1342664A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |
| Карусельная установка для изготовления строительных изделий | 1990 |
|
SU1763193A1 |
| Многошпиндельный гайковерт | 1984 |
|
SU1180255A1 |
| Устройство для перегрузки в горизонтальной плоскости грузов,преимущественно контейнеров | 1977 |
|
SU735532A1 |
| Автомат для изготовления и маркировки трубчатых монтажных бирок | 1985 |
|
SU1279858A1 |
| Механизм радиальной подачи суппорта | 1980 |
|
SU902985A1 |
Изобретение относится к машиностроению и может быть использовано в транспортно-накопительных системах гибких переналаживаемых производственных комплексов из станков с ЧПУ. Целью изобретения является расширение технологических возможностей за счет обеспечения более плавной передачи кассеты с заготовками. Электродвигатель блока горизонтального перемещения передает вращение на обоймы 22,23 обгонных муфт. При этом обойма 22 вращается против часовой стрелки, а обойма 23-по часовой. Ролик 24 заклинивается в пазу и вращение передается через ступицу 26 на приводную звездочку 18, которая перемещает наружную ветвь цепи 30 вдоль направляющей планки 34. Цепь 30, находясь в зацеплении с зубьями 39, упирающимися в упоры 42, перемещает кассету 3 в направлении блока горизонтального перемещения. Зубья 40 упираются в упоры 42 и свободно перемещают наружную ветвь цепи 31 вдоль направляющей планки 35, при этом крутящий момент обоймой 23 на ступицу 27 не передается. 6 ил.
/7///////////////////7 /777/7У7// //////////////////
/
BuSA
Фи. 2
Вид 6
Фиг.З
r-г
повернуто Ш
59
J
Фиг.
U2.5
| Проспект фирмы Fritz Werner und Hermann Kolb, Werkzengmaschinen № -1675 D, 3000, 7-83HH, 1983. |
