HioGporebnfe относится ic автоматике и кьмислнтельиой технике и может быть нспользопано для управления различными устройстпа1-1и телемеханики и другими программными устройствами, например гальваническими ли1шями, ав- томятюированными складами и произ- водстнеиными процессами, и является усовершенствовшшем устройства по
авт. св. N 1233103.
Цель изобрететшя - упрощение экс- гшуатации устройства.
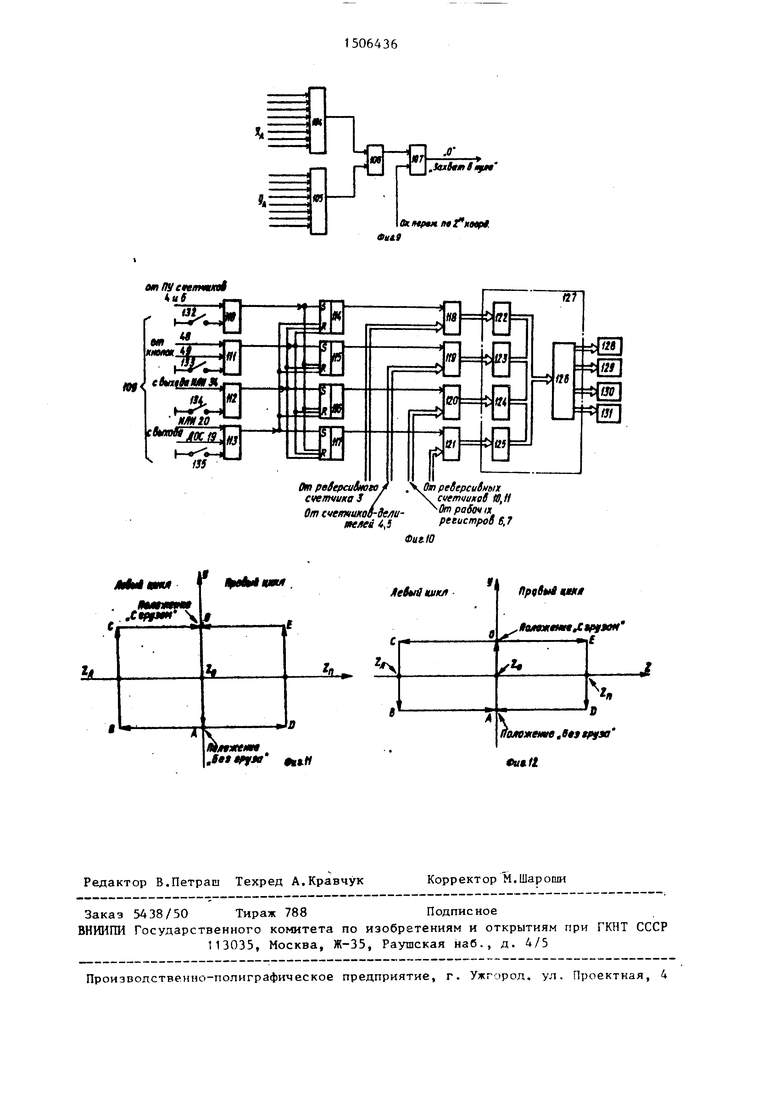
На фиг. 1 представлена схема устройства; на фиг. 2 - схема блоков сравнения; на фиг. 3 - схема блока определения перемещения захвата по третьей координатеj на фиг. 4-8 - схемы блоков управления циклом; на фиг. 9 - схема дешифратора нуля на фиг. 10 - схема блока сопровощ1,амщей индикации; на фиг. 11 и 12 - схемы перемещения захвата.
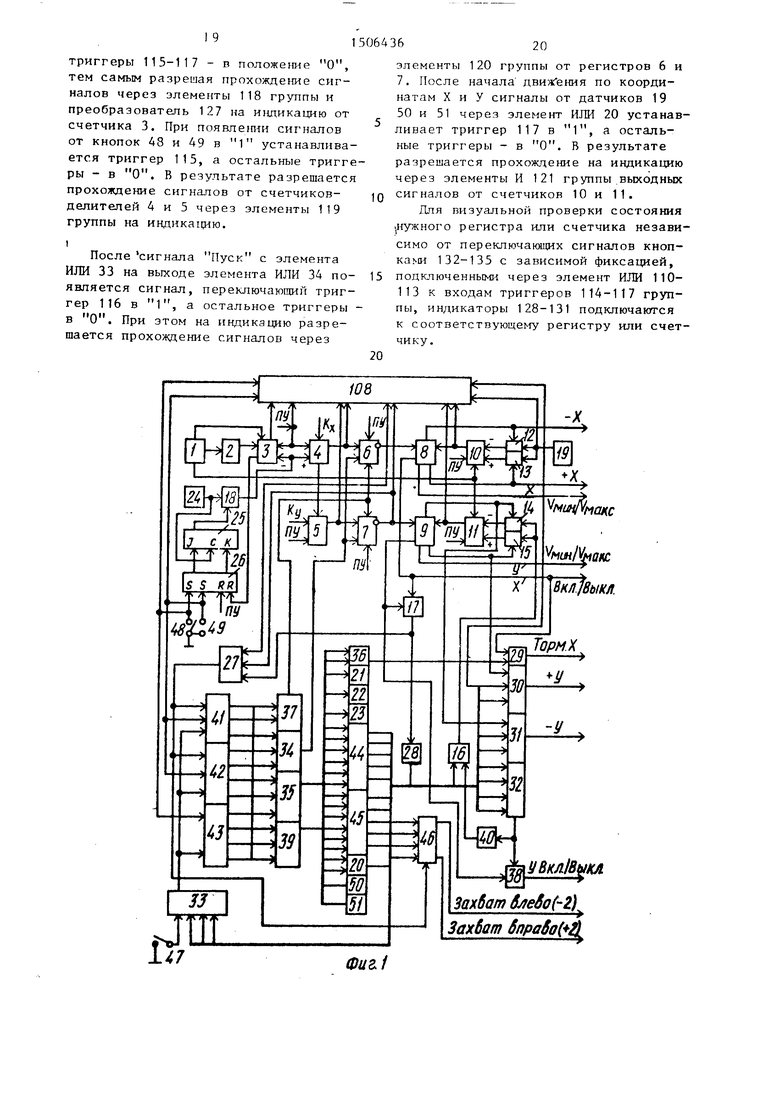
Устройствр содержит (фиг. 1) пульт 1 управления, шифратор 2, пер- вый реверсивный счетчик 3, счетчики- делители 4 и 5, буферные регистры 6 и 7, блоки 8 и 9,сравнеш я, вторые реверсивные счетчики 10 и 11, вторые 12-15, седьмой 16, восьмой 17 и
первьп ТВ элементы И, датчик 19 перемещения захвата по первой координате (X), первый элемент 1-ШИ 20, датчик 21 и 22 предельного положения захвата по третьей координате Z, датчик 23 нулевого положения захвата на второй Y и Z третьей координатам, генератор 24 импульсов, 1К-триггер 25, первый RS-триггер 26, дешифратор 27 нуля, первый формирователь 28 импуль сов, второй RS-триггер 29, второй 30 третий 31, четвертый 32, пятый 33, шестой 34, седьмой 35, восьмой 36, девятый 37, десятьш 38 и одиннадцаты 39 элементы ИЛИ, третий элемент НЕ 40, блоки 41-45 упраапения циклом, блок 46 определения перемещения захвата по третьей координате, элемент 47 запуска, элементы 48 и 49 задания режима и датчики положения захвата п второй координате с грузом 50 и без груза 51.
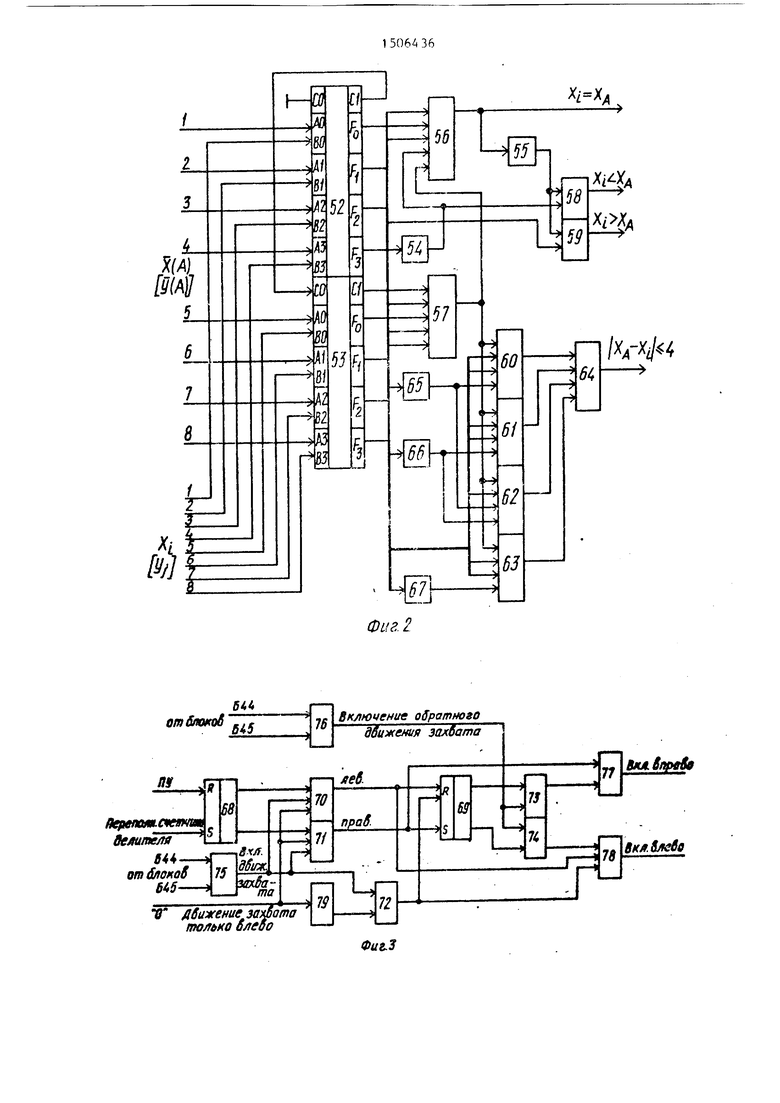
Блоки В и 9 сравнения содержат (фиг. 2) первый 52 и второй 53 комбинационные сумматоры, второй 54 и пер въп1 55 элементы НЕ, пятый 56, шестой 57, третий 58, четвертый 59, двадцат третий 60, двадцать четвертый 61,- двадцать пятый 62 и двадцать шестой
63 элементы И, восемнадцатЕ-м элемент HJIli 64 и шестой 65, седьмой 66 и восьмой 67 элементы НЕ.
Блок 46 содержит (фиг. 3) восьмой 68 и девятый 69 RS-триггеры, восем- надцатьй 70, девятнадцатьв 71, двад- цатьй 72, двадцать первый 73 и двадцать второй 74 элементы И, четырнадцатый 75, пятнадцатый 76, шестнадцатый 77 и семнадцатый 78 элементы ИЛИ пятый элемент НЕ 79.
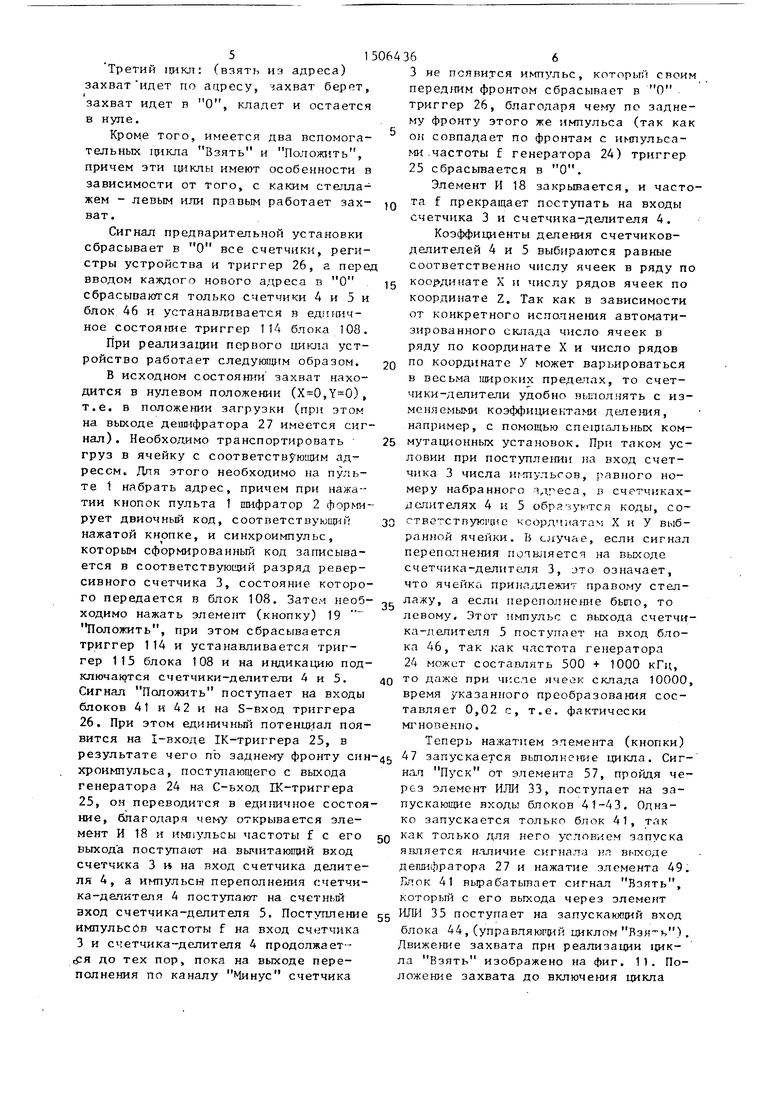
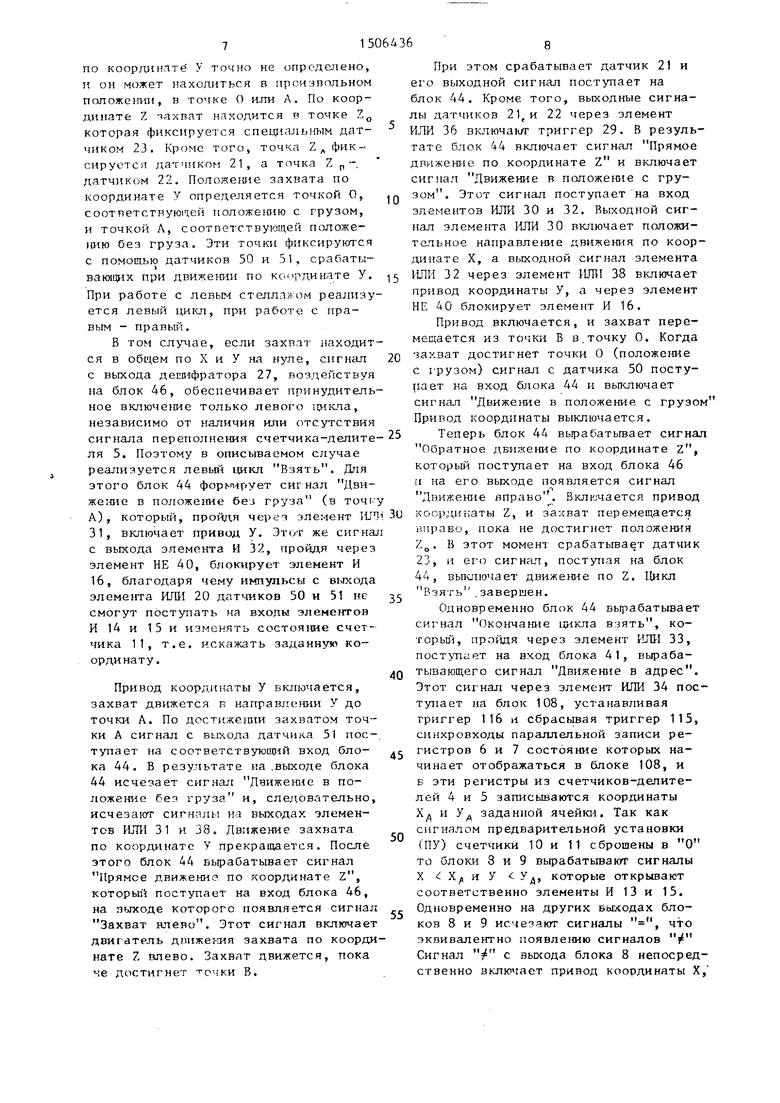
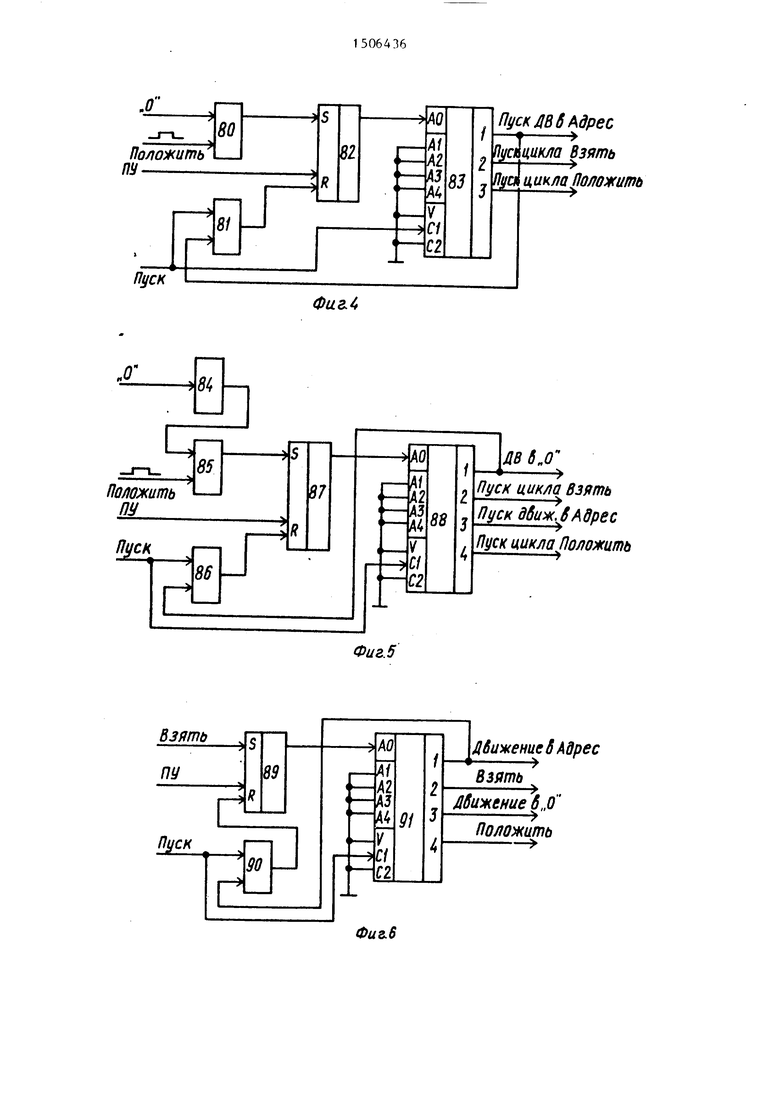
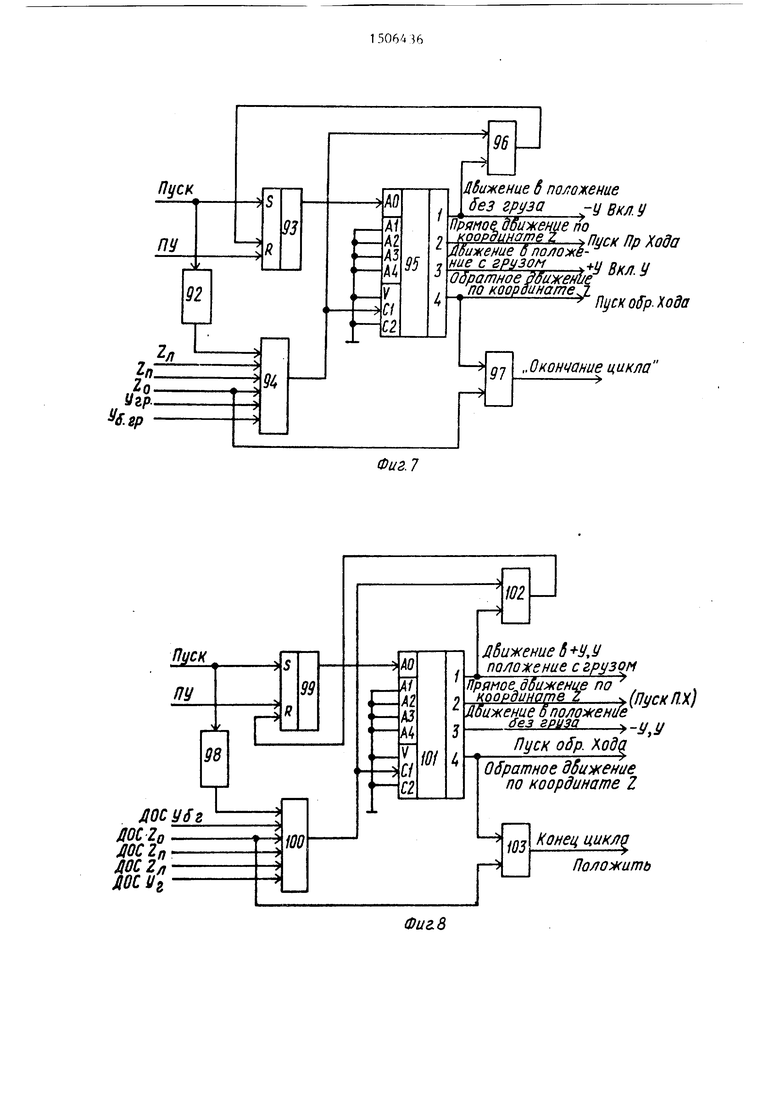
Блок 41 содержит (фиг. 4) девятый 80 и десятьш 81 элементы И, третий RS-триггер 82 и первый регистр 83 сдвига, блок 42 (фиг. 5) - четвертый элемент НЕ 84, одиннадцатый 85 и двенадцатый 86 элементы И, четвертьп RS- триггер 87 и второй регистр 88 сдвига, блок 43 (фиг. 6) - пятый RS-триггер 89, тринадцатый элемент И 90 и третий регистр 91 сдвига, блок 44 (фиг. 7) - второй формирователь 92 импульсов, шестой RS-триггер 93, двенадцатый элемент ИЛИ 94, четвертый регистр 95 сдвига и четырнадцатый 96 и пятнадцатый 97 элементы И, а блок 45 (фиг. 8) - третий формирователь 98 импульсов, седьмой RS-триггер 99, тринадцатьй элемент ИЛИ 100, пятый регистр 101 сдвига и шестнадцатый 102 и семнадцатый 103 элементы И.
Дешифратор 27 нуля состоит (фиг.9) из элементов И 104-107.
Устройство содержит (фиг. 1) блок
108сопровождающей индикации и пульт
109наладчика.
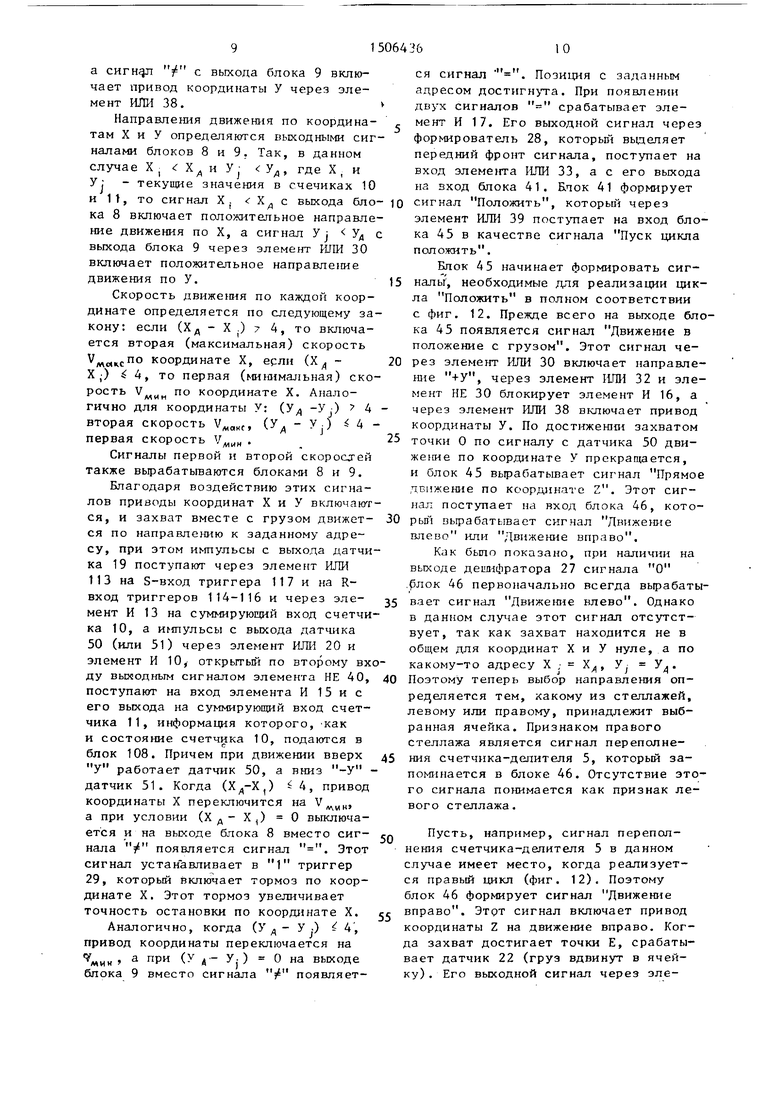
Блок 108 состоит (фиг. 10) из группы двадцать первого 110, девятнадцатого 111, двадцать второго 112, и двадцатого 113 элементов ИЛИ, группы RS-триггеров 114-117, группы элементов И 118-121, группы элементов НЕ 122-125, образующих совместно с дешифратором 126 согласующий преобразователь 127 кода, и индикаторов 128- 131, а пульт 109 - из кнопок 132-135 управления.
Устройство должно реализовать три основных цикла работы, задаваемых оператором.
Первый цикл: (положить из нуля в адрес) захват берет, движется до заданного адреса, захват кладет и остается по адресу.
Второй цикл: (положить не из нуля в адрес) захват идет в О, захват берет, захват идет в адрес, захват кладет и остается по адресу.
515
Третий цикл: (взять из адреса) захват идет по ацресу, захват берет, захват идет в О, кладет и остается в нуле.
Кроме того, имеется два вспомогательных цикла Взять и Положить, причем эти циклы имеют особенности в зависимости от того, с каким стелла- жем - левым или правым работает зах- ват.
Сигнал предварительной установки сбрасывает в О все счетчики, регистры устройства и триггер 26, а перед вводом каждого нового адреса в О сбрасываются только счетчики 4 и 5 и блок 46 и устанавливается в едгпЕич- ное cocToflfme триггер 114 блока 108.
При реализации первого цикла устройство работает следуюгцим образом.
В исходном состоятти захват находится в нулевом положении (,), т.е. в положении загрузки (при этом на выходе дешифратора 27 имеется сигнал). Необходимо транспортировать груз в ячейку с соответствую1цим адресом. Для этого необходимо на те 1 набрать адрес, причем при нажа-- тии кнопок пульта 1 шифратор 2 формирует двиочный код, соотпетствуюпц1Й нажатой кнопке, и синхроимпульс, которым сформированный код записывается Б соответствующий разряд реверсивного счетчика 3, состояние которого передается в блок 108. Затем необ- ходимо нажать элемент (кнопку) 19 Положить, при этом сбрасывается триггер 114 и устанавливается триггер 115 блока 108 и на индикацию под- ключак тся счетчики-делители 4 и 5. Сигнал Положить поступает на входы блоков 41 и 42 и на S-вход триггера 26. При этом единичньш потенциал появится на 1-входе 1К-триггера 25, в результате чего по заднему фронту син хроимпульса, поступающего с выхода генератора 24 на С-БХОД ГК-триггера 25, он переводится в состояние, благодаря чему открывается элемент И 18 и импульсы частоты f с его выхода поступают на вьмитающий вход счетчика 3 и на вход счетчика делителя 4, а импульсы переполнения счетчика-делителя 4 поступают на счетный аход счетчика-делителя 5. Поступление импульсов частоты f на вход счетчика 3 и счетчика-делит ел я 4 продолжает-- сря до тех пор, пока на выходе переполнения по каналу Минус счетчика
366
3 не появится и myльc, которым своим передним фронтом сбрасывает в О триггер 26, благодаря чему по заднему фронту этого же импульса (так как О совпадает по фронтам с импульсами .частоты f генератора 24) триггер 25 сбрасьгоается в О.
Элемент И 18 закрьюается, и частота f прекращает поступать на входы счетчика 3 и счетчика-делителя 4.
Коэффициенты деления счетчиков- делителей 4 и 5 выбираются равные соответственно числу ячеек в ряду по координате X и числу рядов ячеек по координате Z. Так как в зависимости от конкретного испатнения автоматизированного склада число ячеек в ряду по координате X и число рядов по координате У может варьироваться в весьма нироких предачах, то счетчики-делители удобно вьшолнять с изменяемыми коэффициентами деления, например, с помощью спещгальных коммутационных установок. При таком условии при поступлении на вход счетчика 3 числа игтульсов, равного номеру набранного адреса, в счетчиках- делителях 4 и 5 образуются коды, со- ствотствую1 01е коордч}1атам X и У выбранной ячейки. В случае, если сигнал перепапнения появляется на выходе счетчика-делителя 3, это означает, что ячейка принадлежит правому стеллажу, а если переполнение быпо, то левому. Этот импульс с выхода счетчика-делителя 5 поступает на вход блока 46, так как частота генератора 24 может составлять 500 + 1000 кГц, то даже при числе ячеек склада 10000 время указанного преобразования составляет 0,02 с, т.е. фактически ш нопенно.
Теперь нажатием элемента (кнопки) 47 запускается выполне1 ие цикла. Си1- на.п Пуск от элемента 57, пройдя через элемент ИЛИ 33, поступает на запускающие входы блоков 41-43. Однако запускается только блок 41, так как только для него условием запуска является н.аличие сигнала ня выходе дешифратора 27 и нажатие элемента 49 Елок 41 вырабатывает сигнал Взять, которьш с его выхода через элемент ИЛИ 35 поступает на запускаюп(ий вход блока 44 , (управляюрд й циклом ) Движение захвата при реализации цикла Взять изображено на фиг. 11. Положение захвата до включения цикла
по координате У точно не определено, и он может находиться в произвольном положегая, в точке О или А, По координате Z талват находится в точке 7,„
которая фиксируется специальным дат чиком 23. Кроме того, точка
сируется датчиком 21, а точка Z -. датчиком 22. Положение захвата по координате У определяется точкой О, соотпетствую1дей положению с грузом, и точкой Л, соответствующей положению без груза. Эти точки фиксируются с помощью датчиков 50 и 51, срабаты- ваю1цих при движении по координате У.
При работе с левым стеллажом реализуется левый цикл, при работе с правым - правый.
В том слу чае, если захват находится в общем по X и У на нуле, сигнал с выхода дешифратора 27, воздействуя на блок 46, обеспечивает принудительное включеьше только левого тщкла, независимо от наличия или отсутствия сигнала переполнения счетчика-делите ля 5. Поэтому Б описьгоаемом случае реализуется левьш цикл Взять. Для этого блок 44 форьпчрует сигнал Движение в положение без груза (в точку
.-
5
10
20
При этом срабатывает датчик 21 и его выходной сигнал поступает на блок 44. Кроме того, выходные сигналы датчиков 21 и 22 через элемент ИЛИ 36 включа11/г триггер 29. В результате блок 44 включает сигнал Прямое движение по координате Z и включает сигнал Движение в положение с грузом. Этот сигнал поступает на вход элементов ИЛИ 30 и 32. Выходной сигнал элемента ИЛИ 30 включает положительное направление движения по координате X, а выходной сигнал элемента 5 Ш1И 32 через элемент ИЛИ 38 включает привод координаты У, а через элемент НЕ 40 блокирует элемент И 16.
Привод включается, и захват перемещается из точки В в.точку о. Когда захват достигнет точки О (положение с грузом) сигнал с датчика 50 посту- шет на вход блока 44 и выключает сигнал Движение в. положение с грузом Привод координаты выключается.
Теперь блок 44 вырабатывает сигнал Обратное движение по координате Z, который поступает на вход блока 46 и на его выходе появляется сигнал Движение вправо . Включается привод
25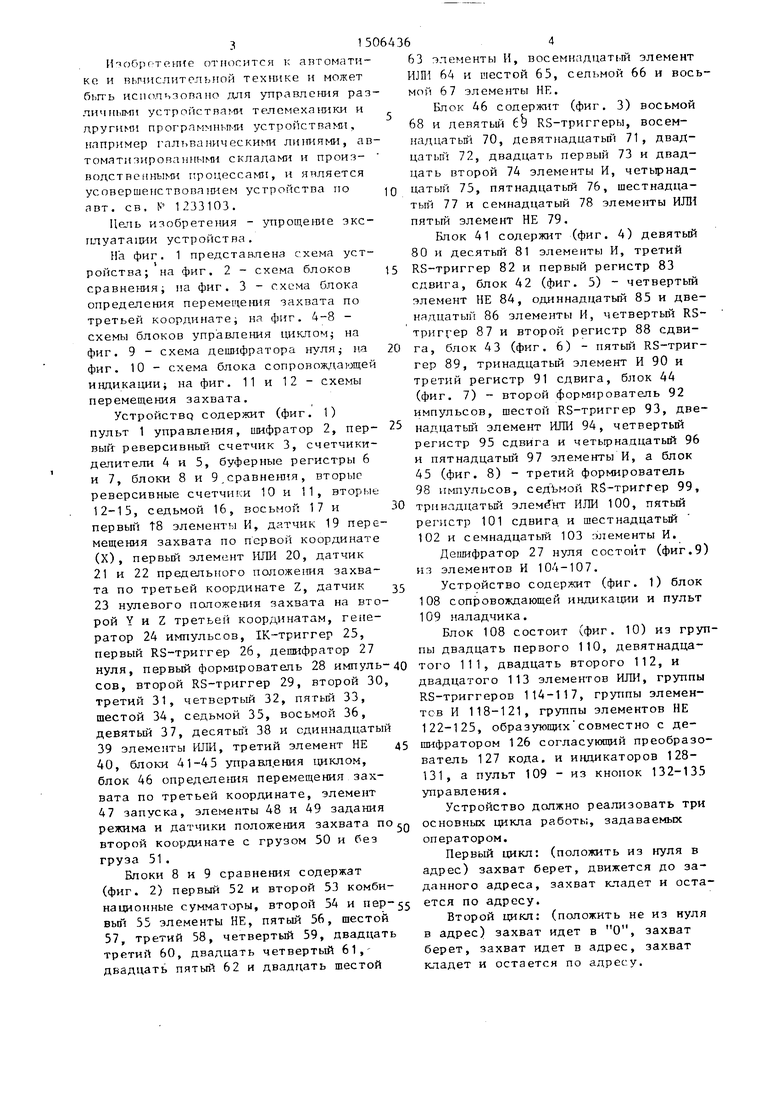
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления захватом автооператора | 1982 |
|
SU1233103A1 |
| Устройство для автоматического адресования транспортного средства | 1987 |
|
SU1497622A2 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1348859A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Устройство для программного управления | 1984 |
|
SU1218368A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Цифровой квадратичный интерполятор | 1985 |
|
SU1290354A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
Цель изобретения - упрощение эксплуатации устройства. В устройство введены девятнадцатый и двадцатый элементы ИЛИ, группа RS-триггеров с первой по четвертую группы элементов И, индикаторы и согласующий преобразователь кода. Дополнительно содержит пульт наладчика и двадцать первый и двадцать второй элементы ИЛИ. 1 з.п.ф-лы, 1 ил.
А), который, пройдя через элемент IlTIi 3U координаты Z, и захват перемещается
31, включает привод У. Этот же сигнал с выхода элемента И 32, пройдя через элемент НЕ 40, блокирует элемент И 16, благодаря чему импульсы с вьгхода элемента ИЛИ 20 датчиков 50 и 51 не смогут поступать на входы элементов И 14 и 15 и изменять состояние счетчика 11, т.е. искажать заданную координату.
Привод координаты У включается, захват движется в направлении У до точки А. По достижеш1И захватом точки А сигнал с выхода датчика 51 пос-, тупает на соответствующий вход блока 44 . В результате на .выходе блока 44 исчезает сигнал Движение в положение без груза и, следовательно, исчезают сигналы на выходах элементов ИЛИ 31 и 38. Движение захвата по координате У прекращается. После этого блок 44 вырабатьшает сигнал Прямое движение по координате Z, которьпЧ поступает на вход блока 46, на зыходе которого появляется cигнa l Захват влево. Этот сигнал включает двигатель движения захвата по координате 7. влево. Захват движется, пока ме достигнет очки В.
5
0
5
0
5
р.право, пока не достиг}1ет положения Zjj. В этот момен срабатывает датчик 23, и ег() сигнал, поступая на блок 44, вьпслючает движение по Z. Цикл Взять .завершен.
Одновременно блок 44 вырабатывает сигнал Око1гчание цикла взять, ко- TopbDi, пройдя через элемент ШТИ 33, поступает на вход блока 41, вырабатывающего сигнал Движение в адрес. Этот сигнал через элемент ИЛИ 34 поступает на блок 108, устанавливая триггер 116 и сбрасьшая триггер 115, синхровходы параллельной записи регистров 6 и 7 состояние которых начинает отображаться в блоке 108, и Б эти регистры из счетчиков-делителей 4 и 5 записьшаются координаты Хд и У, заданной ячейки. Так как сигналом предварительной установки (ПУ) счетчики 10 и 11 сброшены в О то блоки 8 и 9 вырабатывают сигналы X f а У Уд, которые открьшагет соответственно элементы И 13 и 15. Одновременно на других выходах блоков 8 и 9 исчезают сигналы , что эквивалентно появлению сигналов V Сигнал с выхода блока 8 непосредственно привод координаты Х,
а сигн V с выхода блока 9 включает привод координаты У через элемент ИЛИ 38.
Направления движения по координатам X и У определяются вькодными сигналами блоков 8 и 9. Так, в данном случае X г Х и У У, где X, и У; - текущие значения в счечиках 10 и It, то сигнал X. г Х с выхода бло ка 8 включает положительное направление движения по X, а сигнал У ; Уд с выхода блока 9 через элемент ШШ 30 включает положительное направление движения по У.
Скорость движения по каждой координате определяется по следующему закону: если (Хд - X j) 7 4, то включается вторая (максимальная) скорость млисПО координате X, если (Х -
X;) 4, то первая (минимальная) скорость V по координате X. Аналогично для координаты У: (У j- вторая скорость , (У i) - первая скорость Ч .
Сигналы первой и второй скоростей также вырабатываются блоками 8 и 9.
Благодаря воздействию этих сигналов приводы координат X и У включаются, и захват вместе с грузом движет- ся по направлению к заданному адресу, при этом импульсы с выхода датчика 19 поступают через элемент ИЛИ 113 на S-вход триггера 117 и на R- вход триггеров 114-116 и через эле- мент И 13 на суммирующий вход счетчика 10, а иппульсы с выхода дат1шка 50 (или 51) через элемент ИЛИ 20 и элемент И 10, открытый по второму входу вькодным сигналом элемента НЕ 40, поступают на вход элемента И 15 и с его выхода на суммирующий вход счетчика 11, информация которого, как и состояние счетчика 10, подаются в блок 108. Причем при движении вверх У работает датчик 50, а вниз -У - датчик 51. Когда (Х,-Х|) 4, привод координаты X переключится на V, а при условии (Хд- X,) 0 выключается и на выходе блока 8 вместо сиг
нала появляется сигнал . Этот сигнал устан авливает в 1 триггер 29, который включает тормоз по координате X. Этот тормоз увеличивает точность остановки по координате X.
Аналогично, когда (Уд- У.-) 4, привод координаты переключается на
мин Р 4 У)) О выходе блока 9 вместо сигнала V появляетюJ5
20
25
0 05
0
5
ся сигнал . Позиция с заданным адресом достигну та. При появлении двух сигналов срабатывает элемент И 17. Его выходной сигнал через формирователь 28, которьв выделяет передний фронт сигнала, поступает на вход элеме)гга ИЛИ 33, а с его выхода на вход блока 41. RTOK 41 формирует сигнал Положить, которьш через элемент ИЛИ 39 поступает на вход блока 45 в качестве сигнала Пуск цикла положить.
Блок 45 начинает формировать сигналы , необходимые для реализации цикла Положить в полном соответствии с фиг. 12. Прежде всего на выходе блока 45 появляется сигнал Движение в положение с грузом. Этот сигнал через элемент ИЛИ 30 включает направление +У, через элемент ИЛИ 32 и элемент НЕ 30 блокирует элемент И 16, а через элемент ИЛИ 38 включает привод координаты У. По достижении захватом точки О по сигналу с датчика 50 дви- же}ме по координате У прекращается, и блок 45 вырабатывает сигнал Прямое движение по координате Z. Этот сигнал поступает на вход блока 46, кото- рьт вырабатывает сигнал Движение влево или Движение вправо.
Как бьио показано, при наличии на выходе дешифратора 27 сигнала О ,рлок 46 первоначально всегда вырабатывает сигнал Движе1ше влево. Однако в данном случае этот сигнал отсутствует, так как захват находится не в общем для координат X и У нуле, а по какому-то адресу X ; Х, Уу У. Поэтому теперь выбор направления определяется тем, какому из стеллажей, левому или правому, принадлежит выбранная ячейка. Признаком правого стеллажа является сигнал переполнения счетчика-делителя 5, который запоминается в блоке 46. Отсутствие этого сигнала понимается как признак левого стеллажа.
Пусть, например, сигнал переполнения счетчика-делителя 5 в данном случае имеет место, когда реализуется правьй цикл (фиг. 12). Поэтому блок 46 формирует сигнал Движение вправо. Этот сигнал включает привод координаты Z на движение вправо. Когда захват достигает точки Е, срабатывает датчик 22 (груз вдвинут в ячейку) . Его выходной сигнал через элемент ИЛИ 36 выключает (сбрасывает в О триггер 29) тормоза координаты X и, кроме того, поступает на соответствующий вход блока 45. При этом на выходе блока 45 исчезает сигнал Прямое движение по координате Z и появляется сигнал Движение в положение без груза. Этот сигнал через элемент ИГЛ- 31 включает направ- леуше движения -У, через элементы ИЛИ 32 и 38 включает привод У, а через элемент ИЛИ 32 и элемент НЕ 40 блокирует элемент И 16.
Захват перемещается из точки Ев точку D.
При этом груз лoжJiтcя на дно ячейки. По достижении точки D импульс с выхода датчика 51 поступает на вход блока 45. В результате на его выходе исчезает сигнал Движение в положение без груза и появляется сигнал обратное движение по координате Z. Этот сигнал поступает на вход блока 46, на выходе которого появляется си нал Движение влево. Привод координаты Z начинает перемещать захват влево до тех пор, пока не сработает датчик 23 (нулевого положения захвата по координате Z). Захват без гру- за выходит из сташтажа в точку А. Выходной сигнал датчика 23 поступает на вход блока 45, при этом выключается сигнал Обратное движение по координате Z. Цикл Положить завершен. На выходе блока 45 появляется сигнал Окончание цикла положить, который через элемент ИЛИ 33 поступает на вход Пуск блока 41. Первый цикл завершен, поэтому в блоке 41 происходя лишь внутренние сбросы и никаких внених сигналов не вырабатьшается. Действительно, захват, взяв из нулевого (по X и У) патожения, положил его в ячейку с заданным адресом.
При реализацией второго цикла устройство работает следующим образом.
Первоначально захват находится около ячейки с некоторым адресом X ., У,, Причем значения X ; и У ; находят- ся в счетчиках 10 и 11. Эти же величины находятся также в счетчиках делителях 5 и 4 и регистрах 6 и 7. На выходе дешифратора 27 отсутствует сигнал нулевого положения координат X я У.
Для реализации второго цикла необходимо на пульте набрать номер ячейки, куда необходимо положить груз.
Работа пульта 1, шифратора 2 и счетчика 3 при этом описана выше. Затем нажатием элемента (кнопки) 49 формируют сигнал Псшожить, который поступает на входы блоков 41 и 42, и запускает (устанавливает в 1) триггер 20, В результате включается преобразование набранного номера ячейки в координаты У, которые окажутся в счетчиках-дапителях 4 и 5 так же, как при работе первого цикла. Затем замыканием элемента (кнопки) 47 формируется сигнал Пуск, которьй через элемент ИЛИ 33 поступает на входы блоков 41-43. Однако теперь запускается только блок 42. т.е. только его условием запуска является наличие сигнала от элемента 48. и отсутствие сигнала нуля координат X, У на выходе де1Ш1фратора 27.
По сигналу Пуск блок 42 формирует сигнал Движение в ноль, который через элемент ИЛИ 37 поступает на входы сброса регистров 6 и 7 и сбрасывает их в О. При этом на выходах блоков 8 и 9 появляются сигналы
Х| Хд и yj Уд, и сигналы /. Сигнал X ; X . с выхода блока 3 от- ключает направление движения -X и открывает элемент И 12. Сигнал с выхода блока 8 включает привод координаты X. Сигнал У j У л - выхода блока 9 через элемент ИЛИ 31 включает направление движения У, а сигнал / через элемент 1ШИ 38 включает привод У. Захват начинает перемещаться по координатам X и У в направлении нуля.
Выбор и переключения скоростей движения V происходит так же, как в первом цикле. Импульсы обратной связи на координате X с датчика 19 через элемент И 12 поступают на вычитакяций вход счетчика 10, а импульсы обратной связи по координате У с выхода датчика 20 через элемент ИЛИ 16, открытый выходным сигналом эле- НЕ 40, и элемент 14 поступают на вычитающий вход счетчика 11, а также через элемент ИЛИ 113 на S- вход RS-триггера 117.
При появлении О в счетчике 10 на выходе блока 8 появляется сигнал , который включает триггер 29 (тормоза), одновременно выключается привод X. При появлении О в счетчике 11 на выходе блока 9 появляется сигнал . Этот сигнал включает
движение по координате У. Захват приходит в ноль по X и У.
При наличии двух сигналов на входе элемента ИЛИ формируется сигнал j передшгй фронт которого через формирователь 28 и элемент ИЛИ 33 поступает на вход Пуск блока 42, Блок 42 формирует сигнал Пуск цикла взять, которьй через элемент ИЛИ 35 запускает блок 44 (управления циклом Взять). С этого момента устройство работает так же, как при реализации первого цикла. По окончании цикла Взять захват идет в адрес, по достижении адреса реализуется цикл Положить, после чего действия прекращаются. Второй 1;икл завершен.
При реализации третьего цикла устройство работает следую1цим образом.
Первоначально захват находится в произвольном положении, координаты которого X и У хранятся в счетчиках 10 и 11 соответственно. Для реализации третьего цикла на пульте 1 необходимо набрать номер ячейк, из которой необходимо взять груз. Этот номер записывается в счетчик 3. Далее, нажимая элемент 48 (кнопку)
15
Взять, подготавливают блок 43 и ус-ЗО 53 подается прямей код X , У. текуlljt n r ....JJ
танавливакуг в 1 триггер 26. При этом запускается преобразование номера ячейки в ее координаты X и Уд так же, как описано выше. При этом
цих координат X, У с выходов счетчиков 10 и 11 соответственно. В основу работы схемы заложен следующий алгоритм X X (у / У j). если код на выходе сумматоров (F) равен 111111111 а перенос из старшего разряда отсут-. ствует, т.е.
новые значения X . и
п
У записываются
35
в счетчики-делители 4 и 5, а признак стеллажа - в блок 46.
Затем элементом 47 формируется сигнал Пуск, который через элемент ИЛИ 33 поступает на входы Пуск ков 41-43, но запускается только блок 43. При этом на выходе блока 43 формируется сигнал Движение в адрес, который через элемент ИЛИ 34 включает
подцикл Движение в адрес. Движение.с И 57, элемента НЕ 54, и элемента И 56.
- ..
в адрес осуществляется так же, как при работе первого . По окончании подцикпа Движение в адрес выходной сигнал формирователя 22 через элемент ИЛИ 33 поступает на вход блока 43 и последний формирует сигнал Пуск цикла взять, который через элемент ИЛИ 35 запускает блок 44. Цикл Взять реализуется так же, как
50
Действительно, если код F на выходах всех разрядов сумматоров 52 и 53 равен 1, то на всех входах элемента И 57 присутствуют единичные сигналы и, следовательно, имеется сигнал и на его выходе, который воздействует на вход элемента И 56, но на других его входах также единицы, так как на выходах F, F, и F. сумматора 52 рыло описано выше с учетом направле-единицы, а на выходе С1 сумматора 53
ноль, то на выходе элемента НЕ 54 - единица.
НИН, т.е. левого или правого стеллажа, Захват берет нужный груз. Сигнал Окончание цикла с выхода блока 44 через элемент ИЛИ 33 поступает на
кй
10
506436 4
вход блока. 43. Блок 43 формирует сигнал через элемент ИЛИ 37 Движение в ноль, а затем формирует сигнал Пуск цикла положить. Этот сигнал через элемент ИЛИ 39 запускает блок 45 (управления циклом Положить), причем если на выходе дешифратора 27 имеется сигнал нулевого состояния, воздействующий на блок 46, то цикл Положить реализуется в левом варианте так же, как описано выше. Захват кладет груз. Сигнал Окончание 1щкла с выхода блока 45 через элемент ИЛИ 33 на вход блока 43, но никаких внешних сигналов блок 43 не вырабатывает, а лишь производит внутренние сбросы. Третий цикл завершен. Связь пульта 1 со счетчиками 10 и 11 необходима для занесения исходной информации при исключении питания, если захват не в нуле.
Блок 8 (9) работает следующим образом (фиг. 2).
На первую группу входов сумматоров 52 и 53 подается обратный код X д (Уд) координаты X или У с выходов регистраторов 6 или 7 соответственно, а на вторую группу входов сумматоров 52
15
20
25
....JJ
5
Q
цих координат X, У с выходов счетчиков 10 и 11 соответственно. В основу работы схемы заложен следующий алгоритм X X (у / У j). если код на выходе сумматоров (F) равен 111111111 а перенос из старшего разряда отсут-. ствует, т.е.
Х/Х Гу. У ),если 1111 1111, а
С1 О;
Х:7Х(),если Г П111П1, а
С1 1;
() 4, то сигнал Хд Xj () формируется с помощью элемента
- ..
Действительно, если код F на выходах всех разрядов сумматоров 52 и 53 равен 1, то на всех входах элемента И 57 присутствуют единичные сигналы и, следовательно, имеется сигнал и на его выходе, который воздействует на вход элемента И 56, но на других его входах также единицы, так как на выходах F, F, и F. сумматора 52 единицы, а на выходе С1 сумматора 53
ноль, то на выходе элемента НЕ 54 - единица.
Сигнал X; Xдформируется с помощью элемента И 58 при совпадении сигнала , снимаемЬго с выхода элемента НЕ 54, и сигнала F 11111111, снимаемого через элемент НЕ 55 с выхода элемента И 56.
Сигнал X; Хд формируется с помощью элемента И 59 при совпадении сигналов с выхода С1 сумматора 3 и 1 11 111 1 с выхода элемента НЕ 55.
Сигнал (Х - Xj) 4 формируется дешифратором, построенным на элементах И 60-63, ИЛИ 64 и НЕ 65-67. Элементы НЕ «65-67 служат соответственно для образования сигналов F,, , F и F,. Сигналы на выходах элементов И 60- 63 формируются при следующих кодах на выходах сумматоров 52 и 53, 1,2, 3,4, что отличается от состоя1П1я Х Х- соответственно на 1,2,3,4 импуль- са. Следовательно, на выходе элемента ИЛИ 64 единичный сигнал только тогда, когда необходимо включить низкую скорость.
Задача блока 46 (фиг.З) - пра- ВИЛЬНО выбирать направления движения захвата при реализации циклов Взять и Положить в зависимости от того, с каким стеллажом, левым или правым, реализуется тот или иной цикл. Кроме того, особым случаем является работа в О, т.е. в положении загрузки, когда необходимо реализовать только левый цикл. Работает блок следуюпц м образом. Первоначально, сигналом
предварительной установки (ПУ) триггер 68 устанавливается в нулевое состояние, что воспринимается блоком как работа с левым 2теллажом. Если в процессе преобразования заданного номера ячейки в координаты Х, и Уд счетчик- делитель 5 переполняется, то его импульс переполнения устанавливает триггер 68 в состояние 1, что воспринимается как команда работы с правым стеллажом.
Пусть теперь на любой из входов элемента ИЛИ 75 поступает сигнал Прямое движение по координате Z. Если захват находится не в нуле, то сигнал нулевого положения, являющийся сигналом запрета для элементов И 70 и 71, отсутствует, поэтому сигнал прямого движения поступает на входы элементов И 70 и 71. Если триггер 68 находится в состоянии О (признак работы с левым стеллажам), то на выходе элемента И 70 появляется сигнал, который устанавливается в состояние О триггер
69, а через элемент ИЛИ 78 включает движение захвата влево.
С приходом на любой из входов элемента ИЛИ 76 сигнала Обратное движение по координате Z его выходной сигнап поступает на входы элементов И 73 и 74. Но в данной ситуации от- |крыт элемент И 73, и сигнал с его выхода через элемент ИЛИ 77 включает движение захвата вправо, т.е. к положению Zp. В случае, если к моменту прихода сигнала Прямое движение по координате Z триггер 68 находится в состоянии 1 (признак работы с правы;- стеллажом), то сигнал с выхода элемента ИЛИ 75 проходит через элемент И 71, устанавливает в 1 триггер 69 и через элемент ИЛИ 77 включает правое движение по Z. С приходом сигнала Обратное движение по координате Z на любой из входов элемента ИЛ1 1 76 выходной сигнал последнего поступает на входы элементов И 73 и 74, но теперь открывается элемент И 74 и сигнал с его выхода через элемент ИЛИ 78 включает движение влево, что необходимо при реализации соотвстствуюпр1х циклов.
Гели захват находится в нулевом состоянии (состоянии загрузки), необходимо всегда реализовать левый- цикл. В этом случае на входы элементов Pi 70 и 71 воздействует сигнал О как -запрет, но этот же сигнал через элемент НЕ 79 в качестве разрешающего присутствует на входе элемента И 72. Теперь сигнал Прямого движения по координате Z с выхода элемента ИЛИ 75 проходит через элемент И 72, устанавливает в О триггер 69 и через элемент ИЛИ 76 включает движение захвата влево. С приходом сигнала Обратное движение по координате Z этот сигнал с выхода элемента ИЛР1 76 через элемент И 73 и элемент ИЛИ 77 включает движение захвата вправо.
Блок 41 (фиг. 4) работает следую- п{им образом.
Если при наличии сигнала нулевого положения захвата приходит сигнал положить, то срабатьшает элемент И 80 и устанавливает в 1 триггер 82, которьш сигналом предварительной установки сброшен в О. С приходом сигнала Пуск по его заднему фронту на вход С| регистра 83 единица с выхода триггера 82 записывается в младг
ший разряд регистра 83 и на его правом выходе поятшяется сигнал Пуск движения в адрес. Элемент Н 81 в этот раз не срабатывает, так как на его разрешающем входе сигнал появля- атся по окончании сигнала Пуск.
Следую дий сиг нал Пуск, пройдя чере элемент И 81, своим передним фронтом сбрасывает в О триггер 82, а по заднему фропту вызывает сдвиг 1 в регистре 83, в результате чего на его втором выходе появится сигнал Пуск цикла взять. С приходом следующего сигнала Пуск происходит следующий сдвиг и формируется нал Пуск цикла положить. Следующий сигнал Пуск вызьгоает сброс сдвигового регистра в О.
Блок 42 (фиг. 5) работает анало- гично блоку 41 с той разницей, что условием его запуска, т.е. записи 1 в RS-триггер 87 является отсутствие сигнала О на входе элемента НЕ 84. Только тогда по сигналу По- дожить открьшается элемент И 65 и триггер 87 устанавливается в 1. В остальном блок 42 работает аналогино блоку 41, но его регистр 88 сдвиг выполнен четырехразрядным. Блок 42 последовательно формирует четыре сигнала: Пуск движения в ноль, Пуск цикла взять, Пуск движения в адрес, Пуск цикла положить.
Блок 43 (фиг. 6) работает анало- гичцо блоку 42с той разшщей, что
запускается (записывается 1 в триггер 89) непосредственно сигналом Взять. Последовательность сигналов формируемых циклом: Пуск движения в адрес, Пуск цикла взять, Пуск движения в ноль, Пуск цикла положить.
Блок 44 (фиг. 7) работает следующим образом.
Сигналом предварительной установки триггер 93 сброшен в О. С приходом сигнала Пуск по его переднему фронту триггер 93 устанавливается в состояние 1, в результате чего единичньш потенциал появляется на входе последовательной записи регистра 95. Импульс, сформированньп формирователем 92 из сигнала Пуск, пройдя через элемент ИЛИ 94, поступа ет на вход (С1) сдвига регистра 95 и своим задним фронтом записывает 1 в его первый разряд, В результате на его первом выходе возникает
сигнал Движение п положсю1с бе груза. С приходом от датчика 51 сигнала Захват в положение без груза , этот сигнал, прои.дя через элемент ИЛИ 94, элемент И 96, своим передним фронтом сбрасывает в О RS-триггер 93, а своим задним сдвигает 1 в регистре 95. При птом формируется сигнал Прямое движение по координате Z. С приходо - сигнала Захват в левом положении (Z) или Захват в правом положении (Z) с соответствующего датчика этот сигнал через элемент И. Ш 94 поступает на вход сдвига регистра 95 и сдвигает 1 в сле- ДУЮП1ИЙ разряд. При этом формируется сигнал Движение в полг1жение с грузом. С приходом от датч1гка 50 сигнала Захват в положешю с грузом
0 5 0
5
0
5
0
(Угр) на выходе элемента ИЛИ 94 появляется сигнал, сдвига 01тий 1 в регистре 95.При этом формируется сигнал обратное движение по координате
IZ. С приходом ответа Захват в нулевом положении по координате Z (Zg) с датчика обратной связи сиг- на;:, пройдя через элемент И 97, фор- г-1ирует сигнал Око}1г;лние цикла и одновременно по заднепу фронту сбрасывает в О 97. 1|икл 3 а к о }гч е н.
Отличие Б работе блока 45 (фиг.8) от блока 44 состоит в последовательности формируемых сигналов, а именно: Движение в положение с грузом, Прямое движение по координате Z, Движение в положе1 ие без груза, Обратное движение по координате Z, Окончан1-:е цикла.
Дешифратор 27 (фиг. 9) работает следуюрдим образом.
Если X д 00000000, то X д 11111111, и если Уд 00000000, то Уд 11111111, тогда при X д О и У О сигналы будут на входах элемента И 106 и, следовательно, на его выходе. По окончании движения по координатам X и У соблюдается условие Х, Хд, У: Уд , в этот момент приходит сигнал на второй вход элемента И 107 и на его выходе появляется сигнал Захват в нуле.
Блок 103 (фиг. 10) работает сле- дуюшлм образом.
При появлении сигнала ПУ на счет- чиках-деаителях 4 и 5 триггер 114 устанавливается в полпхение 1, а
триггеры 115-117 - в положение О, тем самым разрешая прохождение сигналов через элементы 118 группы и преобразователь 127 на индикацию от счетчика 3. При появле1ши сигналов от кнопок 48 и 49 в 1 устанавливается триггер 115, а остальные триггеры - в О. В результате разрешается прохождение сигналов от счетчиков- делителей А и 5 через элементы 119 группы на индикацию.
I
После сигнала Пуск с элемента ИЛИ 33 на выходе элемента ИЛИ 34 появляется сигнал, переключающий триггер 116 в 1, а остальное триггеры - в О. При этом на индикацию разрешается прохождение сигналов через
0643620
элементы 120 группы от регистров 6 и 7. После начала двияГения по координатам X и У сигналы от датчиков 19 50 и 51 через элемент ИЛИ 20 устанав- лиБает триггер 117 в 1, а остальные триггеры - в О. В результате разрешается прохождение на индикацию через элементы И 121 группы выходных сигналов от счетчиков 10 и 11.
Для визуальной проверки состояния нужного регистра или счетчика независимо от переключающих сигналов кнопками 132-135 с зависимой фиксацией, подключенными через элемент ИЛИ 110- 113 к входам триггеров 114-117 группы, индикаторы 128-131 подключаются к соответствующеьгу регистру или счетчику. 20
10
15
75
Включение обратного
Фиг. 2
Фиг.
.0
54
Фиг.5
Фиг.6
Пуск
ПУ
93
92
Пусн
пу
9
98
100
Дбижение 6 положение без груза -д вкл.У
прямое . оороинате 2
о6и кение по
б положение с грузом
Пуск Пр Хода
ние с грузом у о.... //
Обратное дбижение ,по координате л Пусн of р. Хода
91
„OKOHt QHue цикла
Фи2.7
-
АО
Л8ижеиие8+У,У по/ ожение с грузом
щ
А2 А5
м
V С/ С2
fOf
прямое дбижение по ..
координате Z (пуск Л.х}
Движение б положение
de3 груза
Пуск о5р. Ходд
-У,У
Обратное д6и кение по координате 2
т
Конец цикла
ФиаЗ
J«:
т
т
cvemwutffj / cvfmvitMoi №,Н От cvemvMoS-Se/fe- От рабочих
meMH,Sрекистрой е.7
fut-IO
Редактор В.Петраш Техред А.Кравчук
Заказ 5438/50 Тираж 788Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
,Лийвт лмрвмтг нмрв.
ш
Е Е
Г5Г1
Корректор М.Шароши
