Изобретение относится к автоматике и вычислительной технике и может быть использовано для-управления различными устройствами телемеханики и другими программными устрой- ствами, например гальваническими линиями, автоматизированными складами и производственными процессами.
Цель изобретения - упрощение устройства и расширение области приме- нения путем возможности управления захватом автосепаратора по трем координатам.
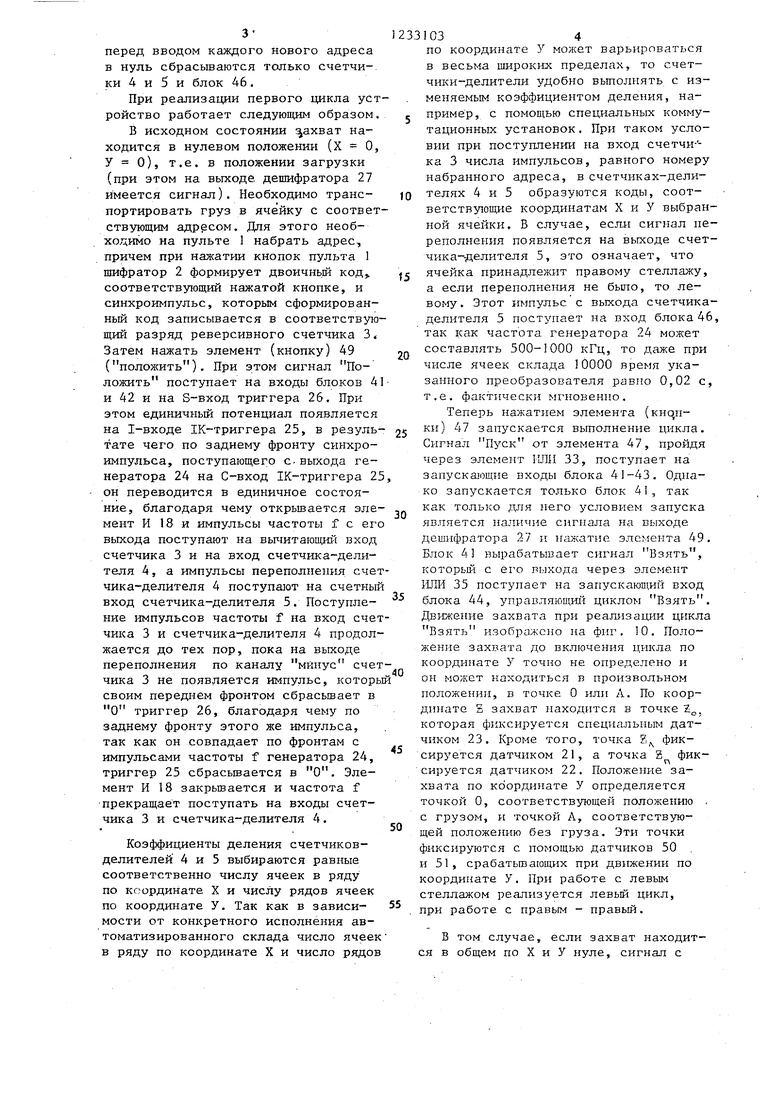
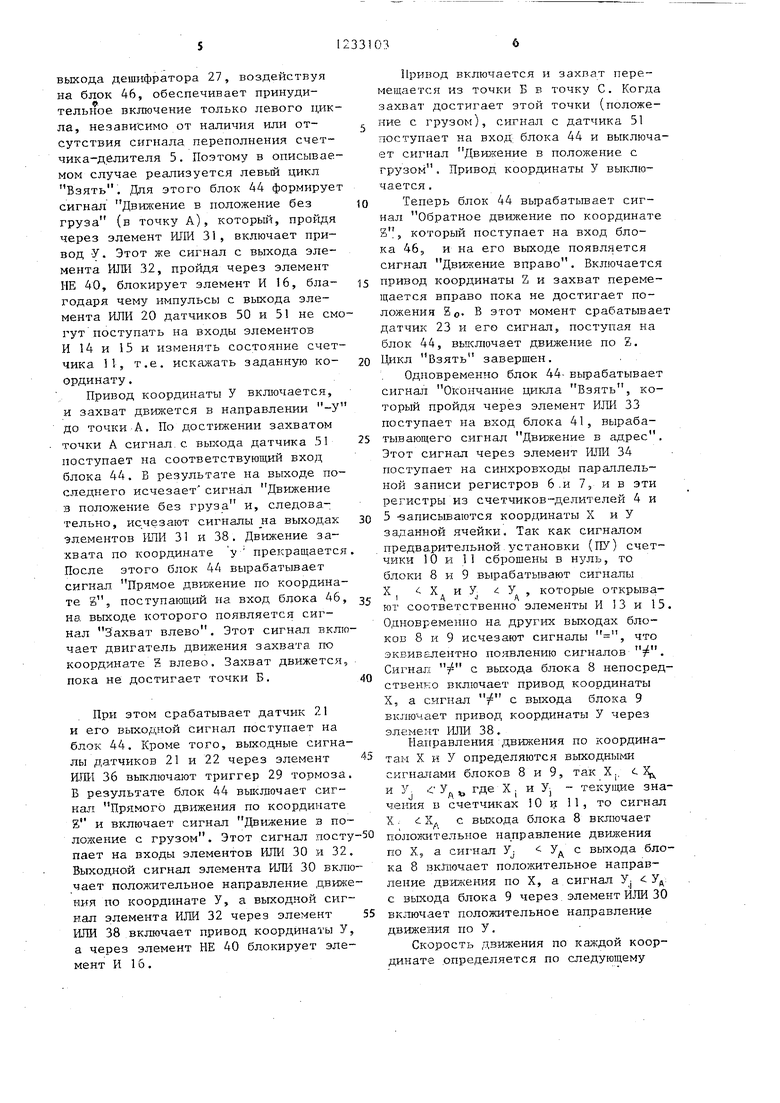
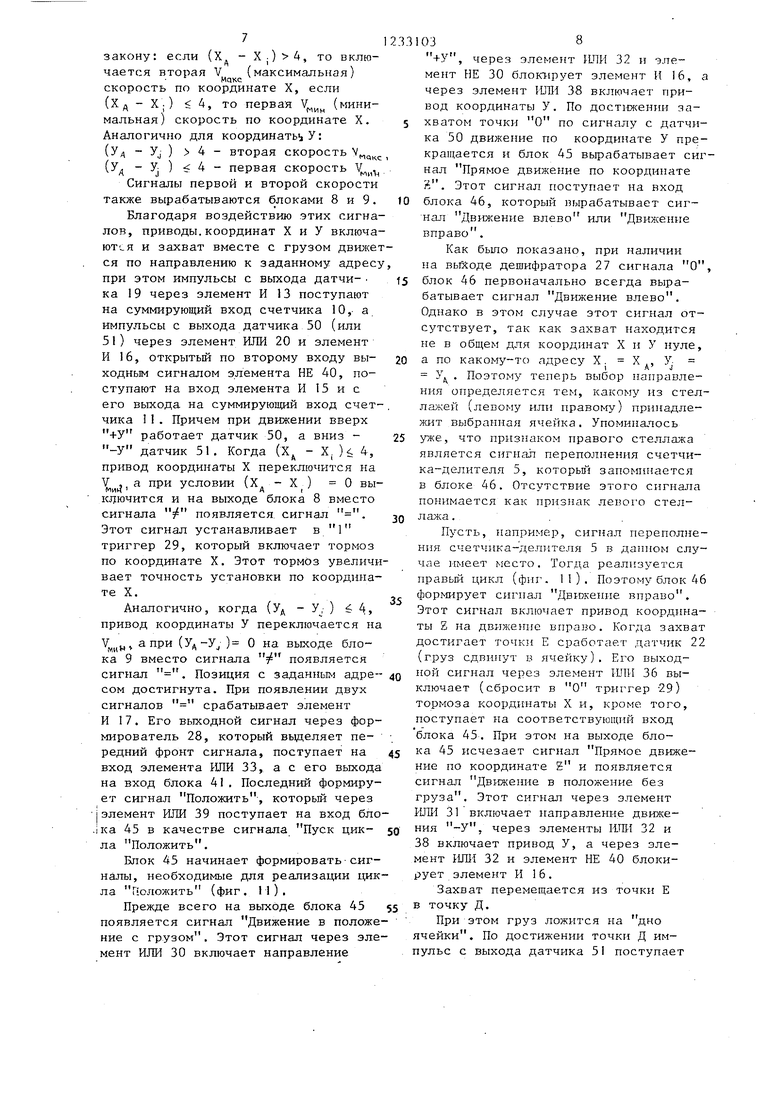
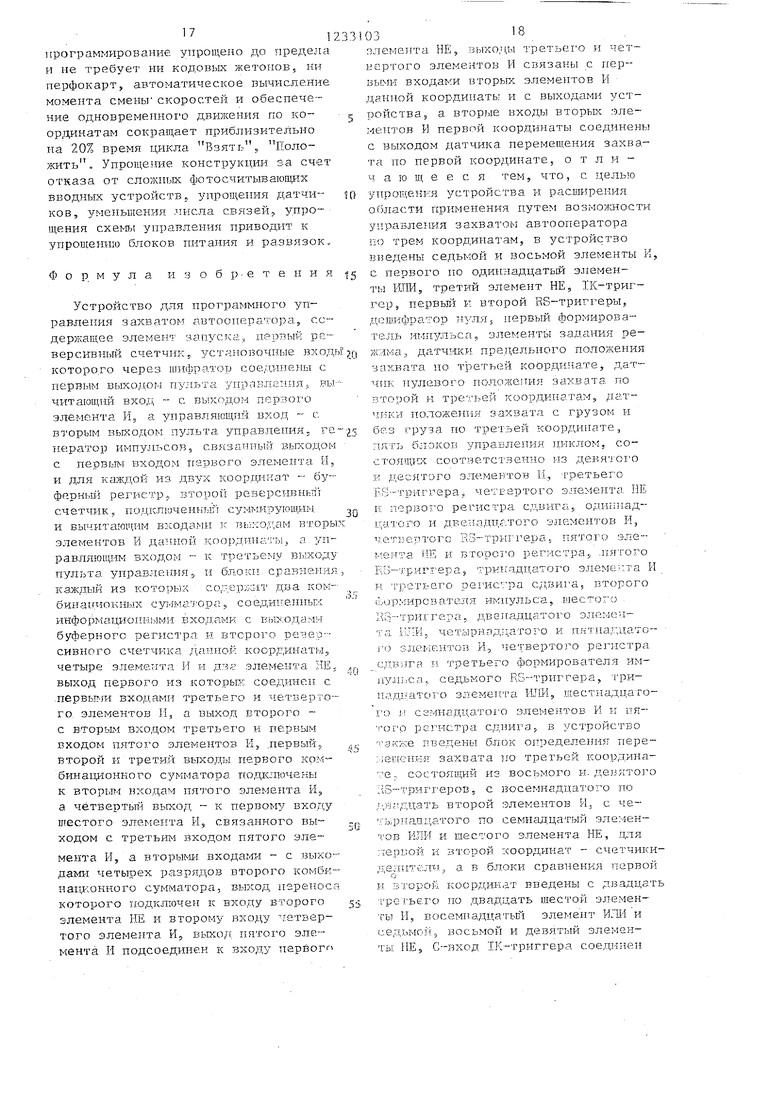
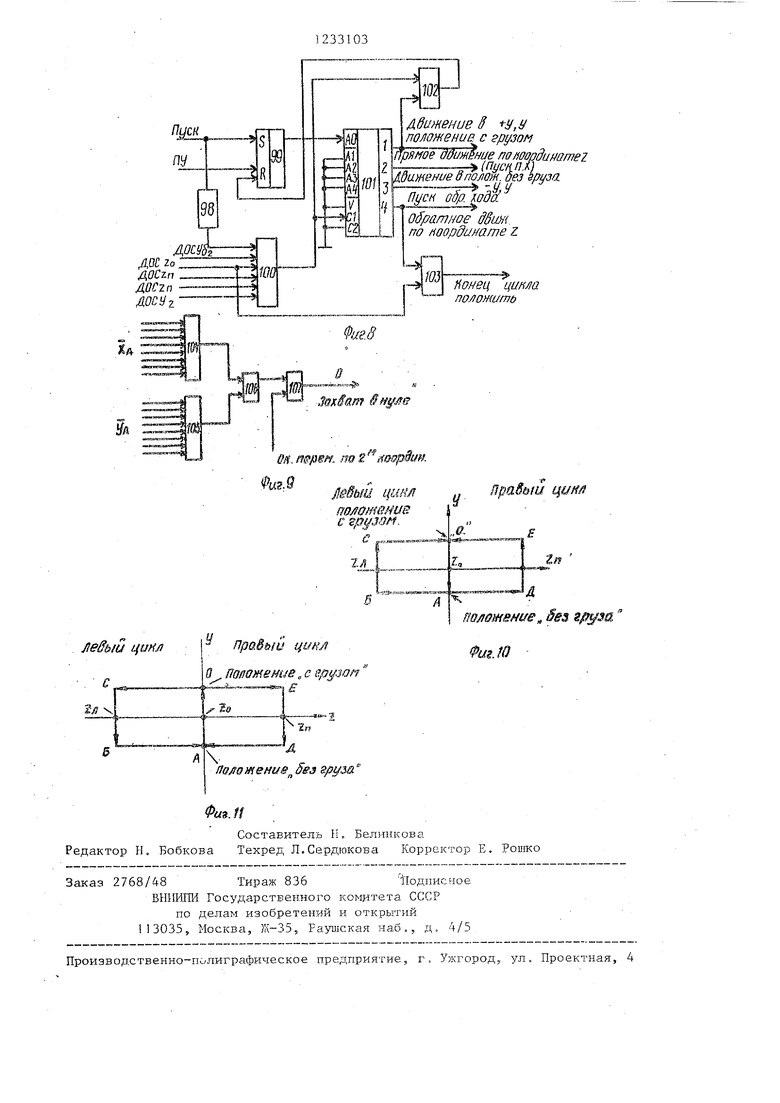
Па фиг. 1 представлена схема устройства; на фиг. 2 - схема блоков сравнения; на фиг. 3 - схема блока определения перемещения захвата по третьей координате; на фиг, 4-8 - схемы блоков управления циклом; на фиг, 9 - схема дешифратора нуля; на фиг, 10 и 1 - схемы перемещения захвата.
Устройство содерлшт (фиг. 1) пульт 1 управления, шифратор-2, первый реверсивньш счетчик 3, счетчтси- делители 4 и 5, буферные регистры 6 и 7, блоки 8 и 9 сравнения, счетчики 10 и 11, вторые 12-15, седьмой 16 восьмой 17 .и первьй 18 элементы И,
датчик 19 перемещения захвата по
первой координате (х), первьй элемент ИЛИ 20, датчики 21 и 22 предельного положения захвата по третьей координате (2), датчик нулевого пололсения захвата по третье: коор- ,динате (и), датчик 23 нулевого положения захвата по второй (l) и третьей (Z) координатам, генератор ,24 импульсов, 1К-триггер .25, первый RS-триггер 26, дешифратор 27 ну- ля, первьн1 формирователь 28 импульса второй RS-триггер 29, второй 30, третий 31, четвертый 32, пятый 33, шестой 34, седьмой 35, восьмой 36,, девятый 37, десятый 38 и однннадца- тьш 39 элементы ИЛИ, третий элемент НЕ 40, блоки 4i-45 управления циклом, блок 46 определения перемещения захвата по третьеьй координате, элемент 47 запуска, элементы 48 и 49 задания режима и датчики положения захвата по второй координате с грузом 50 и без груза 51.
I
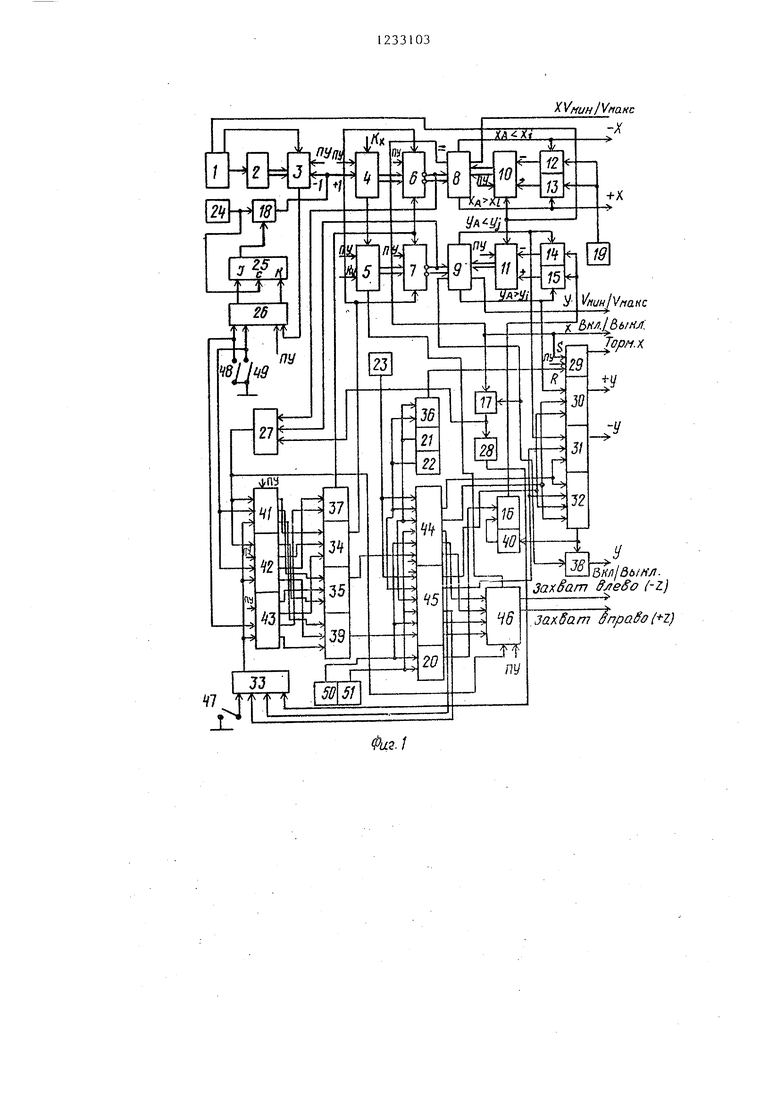
Блоки В и 9 сравнения содержат (фиг. 2) первый 52 и второй 53 комбинационные сумматоры, второй 54 я первый 55 элементы НЕ, пятый 56, .шестой 57, третий 58, четвертый 59,
1032
двадцать третий 60, двадцать четвертый 61, двадцать пятый 62 и двадцать LijecToft 63 элементы И, восемнадцатый элемент ИЛИ 64 и шестой 65, седьмой 66 и восьмой 67 элементы НЕ.
Блок 46 содержит (фиг. З) восьмой 68 и девятый 69 RS-триггеры, во- семна.,а.цатый 70, девятнадцатый 71, двадцатый 72, двадцать первьй 73 и двадцать второй 74 элементы И, четырнадцатый 75, пятнадцатый 76, шестнадцатый 77 и семнадцатый 78 элементы ИЛИ и пятый элемент.; НЕ 79.
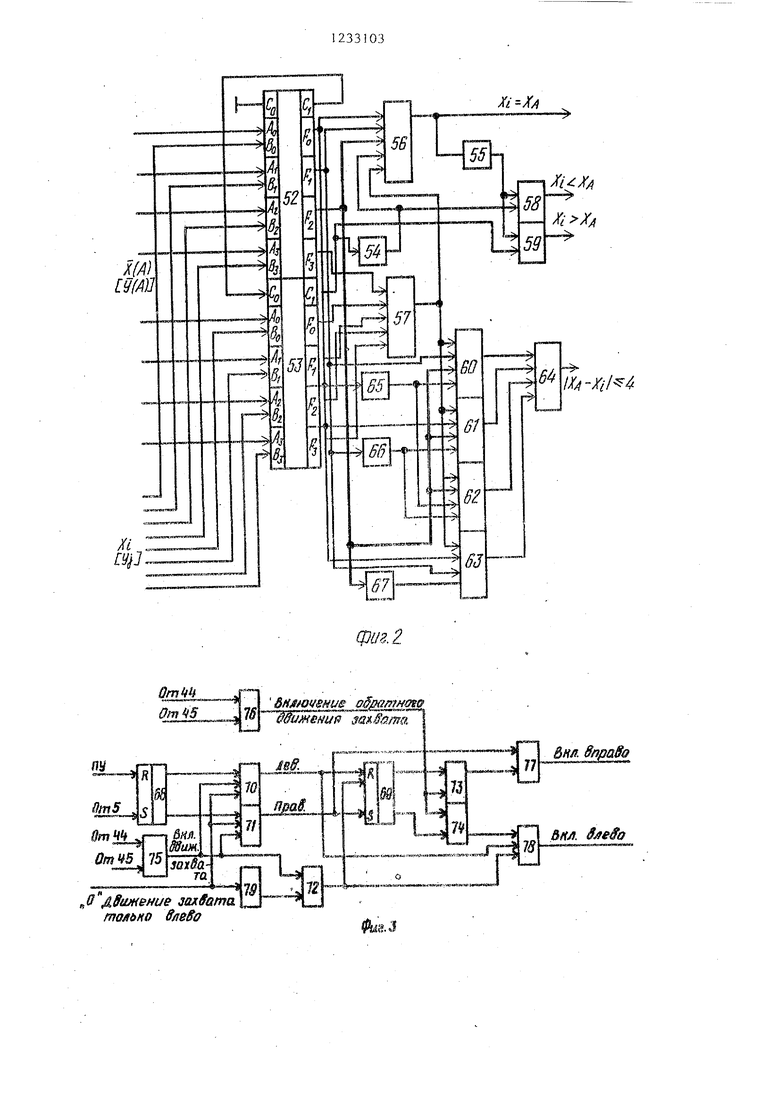
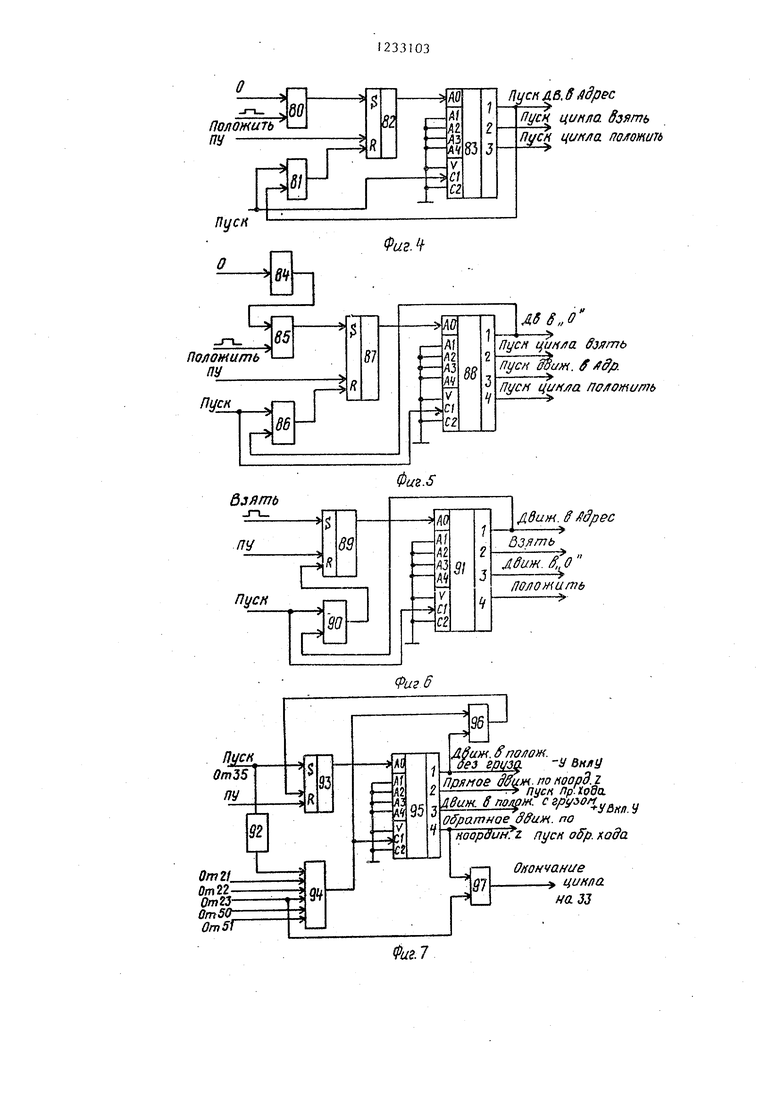
Блок 41 содержит (фиг. 4) девятый 80 и десятый 8 элементы И, третий RS-TpPirrep 82 и первый регистр 83 сдвига, блок 42 (фиг. 5) - четвертый элемент НЕ 84, одиннадцатый 85 и две- падцатьш 86 элементы И, четвертый RS-триггер 87 к второй регистр. 88 сдвига, блок 43 (фиг. 6) пятый RS-трнггер 89, тринадцатьй элемент И 90 и третий регистр 91 сдвига, )3лок 44 (фиг. 7) содержит второй формирователь 92 импульса, шестой RS-триггер 93, двенадцатый элемент ИЛИ 94, четвертый регистр 95 сдвига, четырнадцатьй 96 и пятнадцатый 97 элементы И, Блок 45 (фиг. В) - третий формирователь 98 импульса, седьмой НВ-триггер 99, тринадцатьй элемент ЕЛИ 100, пятьй регистр 101 сдвига и шестнадцатый 102 и семнадцатый 103 элементы И.
Дешифратор 27 нуля состоит (фиг.9) из элементов И 104-107.
Устройство должно реализовывать три основных цикла работы, задавае- оператором, а именно первый цикл: (положить из нуля в адрес) захват идет по адресу, захват берет, двшкется до заданного адреса, захват кладет и остается по адресу второй цик.п: (положить не из ну- ля в адрес) захват идет в О,. захват берет, захват идет в адрес, захват кладет и остается по адресу; третий цикл (взять из адреса), захват и.цет по адресу, захват берет, захват ил,ет в , кладет и остается в нуле.
Кроме того, имеется два вспомога- те.п.ьных цикла Взять и Положить, причем эти циклы имеют в свою редь особенности в зависимости от того с .каким стеллажом - левым или правым, работает захват.
Сигиап предварительной установки сбрасывает в пуль все счетчики, регистры устройства и триггер 26, а
перед вводом каждого нового адреса в нуль сбрасываются только счетчики 4 и 5 и блок 46.
При реализации первого цикла устройство работает следующим образом.
В исходном состоянии ахват находится в нулевом положении (Х О, У 0), т.е. в положении загрузки (при этом на выходе дешифратора 27 имеется сигнал). Необходимо транс- портировать груз в ячейку с соответствующим адресом. Для этого необходимо на пульте 1 набрать адрес, причем при нажатии кнопок пульта 1 шифратор 2 формирует двоичньщ код соответствующий нажатой кнопке, и синхроимпульс, которым сформирован- ньй код записывается в соответствующий разряд реверсивного счетчика 3 Затем нажать элемент (кнопку) 49 (положить). При этом сигнал Положить поступает на входы блоков 41 и 42 и на S-вход триггера 26. При этом единичный потенциал появляется на 1-входе 1К-триггера 25, в резуль- тате чего по заднему фронту синхроимпульса, поступающего с-выхода генератора 24 на С-вход 1К-триггера 25 он переводится в единичное состояние, благодаря чему открывается эле- мент И 18 и импульсы частоты f с его выхода поступают на вычитающий вход счетчика 3 и на вход счетчика-делителя 4, а импульсы переполнепь-ш счетчика-делителя 4 поступа от на счетньй вход счетчика-делителя 5. Поступле- ние импульсов частоты f на вход счетчика 3 и счетчика-делителя 4 продолжается до тех пор, пока на выходе
переполнения по каналу минус счето
чика 3 не появляется импульс, которы
своим переднем фронтом сбрасьшает в О триггер 26, благодаря чему по заднему фронту этого же импульса, так как он совпадает по фронтам с импульсами частоты f генератора 24, триггер 25 сбрасьшается в О. Элемент И 18 закрьшается и частота f прекращает поступать на входы счетчика 3 и счетчика-делителя 4.
Коэффициенты деления счетчнков- делителей 4 и 5 выбираются равные соответственно числу ячеек в ряду по координате X и числу рядов ячеек по координате У. Так как в зависи- мости от конкретного исполнения автоматизированного склада число ячеек в ряду по координате X и число рядов
ю с 20 25 ...
0
5
5
по координате У может варьироваться в весьма широких пределах, то счетчики-делители удобно вьтолнять с изменяемым коэффициентом деления, например, с помощью специальных коммутационных установок. При таком условии при поступлении на вход счетчи- - ка 3 числа импульсов, равного номеру набранного адреса, в счетчиках-делителях 4 и 5 образуются коды, соответствующие координатам X и У выбранной ячейки. В случае, если сигнал переполнения появляется на выходе счетчика-делителя 5, это означает, что ячейка принадлежит правому стеллажу, а если переполнения не было, то левому. Этот импульс с выхода счетчика- делителя 5 поступает на вход блока 46, так как частота генератора 24 может составлять 500-1000 кГц, то даже при числе ячеек склада 10000 время указанного преобразователя равгго 0,02 с, т.е. фактически мгновенно.
Теперь нажатием элемента ( кн) 47 запускается выполнение цикла. Сигнал Пуск от элемента 47, пройдя через элемент ИЛИ 33, поступает на запускающие входы блока 41-43. Однако запускается только блок 41, так как только для него условием запуска является наличие сигнала на выходе дешифратора 27 и нажатне элемента 49. Блок 41 вырабатывает сигнал Взять, которьш с его яыхода через элемент ИЛИ 35 поступает на запускающий вход блока 44, управляющш г циклом Взять. Движение захвата при реализации цикла Взять изображено на фиг. 0. Положение захвата до включения цикла по координате У точно не определено и он может находиться в произвольном положении, в точке О илп А. По координате 2 захват наход1ггся в точке Z. которая фиксируется специальным датчиком 23. Кроме того, точка , фиксируется датчиком 21, а точка Z фиксируется датчиком 22. Положение захвата по координате У определяется точкой О, соответствующей положению - с грузом, и точкой Л, соответствующей положению без груза. Эти точки фиксируются с помощью датчиков 50 . и 51, срабатывающих при движении по координате У. При работе с левым стеллажом реализуется левый цикл, при работе с правым - правый.
В том случае, если захват находится в общем по X и У нуле, сигнал с
выхода дешифратора 27, воздействуя на блок 46, обеспечивает принудительное включение только левого циксутствия сигнала переполнения счетчика-делителя 5. Поэтому в описываемом случае реализуется левьш цикл. Взять. Для этого блок 44 формирует сигнал Двкяшние в положение без груза (в точку А), который, пройдя через элемент ИЛИ 31, включает привод У. Этот же сигнал с выхода элемента ШШ 32, пройдя через элемент НЕ 40, блокирует элемент И 16, бла- годаря чему импульсы с выхода элемента ИЛИ 20 датчиков 50 и 51 не смогут поступать на входы элементов И 14 и 15 и изменять состояние счетчика 11, т.е. искажать заданную ко- ординату.
Привод координаты У включается, и захват движется в направлении -У до точки А. По достижении захватом точки А сигнал.с выхода датчика 51 поступает на соответствующий вход блока 44. В результате на выходе последнего исчезает сигнал Движение в положение без груза и, следовательно, ис,чезают сигналы на выходах элементов 1ШИ 31 и 38, Движение захвата по координате у прекращается После этого блок 44 вырабатывает сигнал Прямое двшке ше по координате и, поступающий на вход блока 46, на выходе которого появляется сигнал Захват влево. Этот сигнал включает двигатель движения захвата по координате Z влево. Захват движется, пока не достигает точки Б.
При этом срабатывает датчик 21 и его выходной сигнал поступает на блок 44. Кроме того, выходные сигналы датчиков 21 и 22 через элемент ИЛИ 36 выключают триггер 29 тормоза. Б результате блок 44 вьжлючает сигнал Прямого дв1гасения по координате Z и включает сигнал Движение в положение с грузом. Этот сигнал посту пает на входы элементов ИЛИ 30 и 32. Выходной сигнал элемента ИЛИ 30 включает полоясительное направление движения по координате У, а выходной сигнал элемента ИЛИ 32 через элемент ИЛИ 38 включает привод координаты У, а через элемент НЕ 40 блокирует элемент И 16.
Привод включается и захват перемещается из точки Б в точку С. Когда захват достигает этой точки (положение с грузом), сигнал с датчика 51 поступает на вход блока 44 и выключает сигнал Двюкение в положение с грузом. Привод координаты У выключается .
Теперь блок 44 вырабатьтает сигнал Обратное движение по координате 2, который поступает на вход блока 46, и на его выходе появляется сигнал Движение вправо. Включается привод координаты Z и захват перемещается вправо пока не достигает положения Zo. В этот момент срабатывае датчик 23 и его сигнал, поступая на блок 44, вьжлючает движение по Z. Цикл Взять завершен.
Одновременно блок 44- вырабатывает сигнал Окончание цикла Взять, который пройдя через элемент ИЛИ 33 поступает на вход блока 41, вырабатывающего сигнал Движение в адрес. Этот сигнал через элемент ИЛИ 34 поступает на синхровходы параллельной записи регистров 6.и 7, и в эти регистры из счетчиков-делителей 4 и 5 -записываются координаты X и У заданной ячейки. Так как сигналом предварительной,установки (ПУ) счетчики 10 и 11 сброщены в нуль, то блоки 8 и 9 вьфабатывают сигналы X I X и д которые открывают соответственно элементы И 13 и 15 Одновреме пю на других выходах блоков 8 и 9 исчезают сигналы , что эквивглентно появлению сигналов т. Сигнал - с выхода блока 8 непосредственно включает привод координаты X, а сигнал т с выхода блока 9 включает привод координаты У через
элемент ИЛИ 38.
Папраззления движения по координатам X и У определяются выходными сигналами блоков 8 и 9, так X,, с Хр и у. i УЛ ъ г Дб X . и У - текущие значения в счетчиках 10 и 11, то сигнал X , 1 Х с вьпсода блока 8 включает пололштельное направление двшкения по Х.5 а сигнал yj Уд с выхода блока 8 включает положительное направление дв:шкения по X, а сигнал У| с выхода блока 9 через.элемент ИЛИ 30 включает положительное направление движения по У.
Скорость движения по каждой координате определяется по следующему
закону: если (Х - Х|)4, то включается вторая V (максимальная) скорость по координате X, если (Хд - X;) 4, то первая V, (минимальная) скорость по координате X. Аналогично для координатьь У: (УД - yj ) 4 - вторая скорость V,q (УД У; ) -s 4 - первая скорость Хл,
Сигналы первой и второй скорости также вырабатываются блоками 8 и 9.
Благодаря воздействию этих сигналов, приводы, координат X и У включаются и захват вместе с грузом двилсет ся по направлению к заданному адресу при этом импульсы с выхода датчи- ка 19 через элемент И 13 поступают на суммирующий вход счетчика 10,- а импульсы с выхода датчика 50 (или 51) через элемент ИЛИ 20 и элемент И 16, открытьй по второму входу выходным сигналом элемента НЕ 40, поступают На вход элемента И 15 и с его выхода на суммирующий вход счетчика I1. Причем при движении вверх +У работает датчик 50, а вниз - -У датчик 51, Когда (Х - Х,) 4, привод координаты X переключится на V ., а при условии (Х - Х) 0 вы- кдючится и на выходе блока 8 вместо сигнала V появляется сигнал . Этот сигнал устанавливает в 1 триггер 29, который включает тормоз по координате X. Этот тормоз увеличивает точность установки по координате X.
Аналогично, когда (Уд - У, ) 4, привод координаты У переключается на
а при ( ) О на выходе блока 9 вместо сигнала V появляется сигнал , Позиция с заданным адресом достигнута. При появлении двух сигналов срабатывает элемент И 17. Его выходной сигнал через формирователь 28, который выделяет передний фронт сигнала, поступает на вход элемента РШИ 33, ас его выхода на вход блока 41. Последний формирует сигнал Положить, которьш через I элемент ИЛИ 39 поступает на вход бло |ка 45 в качестве сигнала Пуск цикла Положить.
Блок 45 начинает формировать сигналы, необходимые для реализации цикла Г оложить (фиг. 11).
Прежде всего на выходе блока 45 появляется сигнал Движение в положение с грузом. Этот сигнал через элемент ИЛИ 30 включает направление
331038
+У, через элемент ИПИ 32 и элемент НЕ 30 блокирует элемент И 16, а через элемент ИЛИ 38 включает привод координаты У. По достижении за- 5 хватом точки О по сигналу с датчика 50 движение по координате У пре- кращается и блок 45 вьфабатывает сигнал Прямое движение по координате и. Этот сигнал поступает на вход 10 блока 46, который вырабатывает сигнал Двийсение влево или Движение вправо.
Как быпо показано, при наличии на выходе дешифратора 27 сигнала О, 15 блок 46 первоначально всегда вырабатывает сигнал Движение влево. Однако в этом случае этот сигнал отсутствует, так как захват находится не в общем для координат X и У нуле, 20 а по какому-то адресу X. X , У- У . Поэтому теперь выбор направления определяется тем, из стеллажей (левому или правому) принадлежит выбранная ячейка. Упоминалось 25 уже, что признаком правого стеллажа является сигнал переполнения счетчика-делителя 5, которьй запоминается в блоке 46. Отсутствие этого сигнала понимается как признак левогю стел- 30 лажа..
Пусть, например, сигнал переполнения счетчика-деллтеля 5 в данном случае место. Тогда реализуется правьп цикл (фиг. 1 1 ) . Поэтому блок 46
сигнал Двюкение вправо.
Этот сигнал включает привод координаты Z на движение вправо. Когда захват достигает точки Е сработает датчик 22 (груз сдвинут в ячейку). Его выходQ ной сигнал через элемент ШШ 36 выключает (сбросит в О триггер -29) тормоза координаты X и, кроме того, поступает на соответствующий вход блока 45. При этом на выходе бло5 ка 45 исчезает сигнал Прямое движение по координате Z и появляется сигнал Движение в положение без груза. Этот сигнал через элемент ИЛИ 31 включает направление движе0 ния -У, через элементы ИЛИ 32 и 38 включает привод У, а через элемент ИЛИ 32 и элемент НЕ 40 блокирует элемент И 16.
Захват перемещается из точки Е
5 в точку Д.
При этом груз ложится на дно ячейки. По достижении точки Д импульс с выхода датчика 5I поступает
91
на вход блока 45. В результате на его выходе исчезает сигнал Движешие в .положение без груза и появляется сигнал Обратное движение по координате Е. Этот сигнал поступает на вход блока 46, на выходе которого появляется сигнал Движение влево. Привод координаты Z начинает перемещать захват влево до тех пор, пока не сработает датчик 23 (нулевого по- ложения захвата по координате Z). Захват без груза выходит из стеллажа в точку А. Выходной сигнал датчика 23 поступает на вход блока 45, при этом выключается сигнал Обратно движение по координате Z. Цикл Положить завершен. Иа выходе блока 45 появляется сигнал Окончание цикла Положить, которьй через элемент ИЛИ 33 поступает на вход Пуск бло- ка 41. Первый цикл завершен, поэтому в блоке 41 происходят лишь внутренние сбросы и никаких внешшо: сигналов не вырабатывается. Действительно захват взяв груз из нулевого (по X и у) положения, положил его в ячейку с заданным адресом.
При реализации второго цикла устройство работает следующим образом.
Первоначально захват находится около ячейки с некоторым адресом X , У,- . Причем значения X - и У находятся в счетчиках 10 и 11. Эти же величины находятся та1сже в счетчиках- делителя 4 и 5 и регистрах б и 7. На вькоде дешифратора 27 отсутствует сигнал нулевого положения координат X и У,
Для реализации второго цикла необходимо на пульте 1 набрать номер ячейки, куда необходимо положить груз. Работа пульта 1, шифратора 2 и счетчика 3 описана. Затем нажатием элемента (кнопки) 49 формируют сигнал Положить,, который поступает на входы блоков 41 и 42 и запускает (устанавливает в ) триггер 26. Б результате включается преобразование набранного номера ячейки в координаты Xд и Уд, которые оказывают- ся в счетчиках-делителях 4 и 5 точно также, как это описано при работе первого цикла, Затем замыканием элемента (кнопки) 47 формируется сигнал Пуск, которьй через элемент ШШ 33 поступает на входы блоков 41-43,, Однако теперь запускается только блок 42, так как только его услови
Ш
s 10 15 2о 25
зо
р 5
5
ем запуска является наличие сигнала от элемента 48 и отсутствие .сигнала нуля координат X, У на выходе дешифратора 27.
По сигнапу Пу ск блок 42 формирует сигнал Движение в нуль, который через элемент ИЛИ 37 поступает на входы сброса регистров б и 7 и сбрасывает их в нуль. При этом на выходах блоков 8 и 9 появляются сигналы X. Хд и Уд и сигналы г. Сигнал X X с выхода блоо
ка о включает направление двилсения -Х и открывает элемент И 12. Сиг- н.ал с выхода блока 8 включает привод координаты X, Сигнал У. У.
- 4
С выхода блока 9 через элемент ИЛИ 31 включает направление движения -У, а сигнал т через элемент ИЛИ 38 влхючает привод У. Захват начинает перемещаться по координатам X и У в направлении нуля.
Выбор и переключения скоростей движения ((,H происходит точно, так же, как и в первом цикле. Импульсы обратной связи по координате X с датчика 19 через элемент И 12 поступают на вычитающий вход счетчика 10, а импульсы обратной связи по координате У с выхода датчика 20 через элемент ИШ-1 16, открытый вы- ходньп- сигналом элемента НЕ 40, и элемент И 14 поступают на вычитающий вход счетчика 11.
При появлении нуля в счетчике 10 на вьссоде блока 8 поя вляется сигнал , который вк.гаЬчает триггер 29 (тормоза) и одновременно выключается привод X. При появлении нуля в счетчике 11 на вькоде блока 9 появляется
сигнал
Этот сигнал выключает
двюкение по координате У. Захват прип.е.т в нуль по X и У. I
При наличии двух сигналов на входе элемента И 17 формируется сигнал, передний фронт которого через форьшрователь 28 и элемент ИЛИ 33 поступает на вход Пуск блока.42, Последнга с формирует сигнал Пуск цикла Взять, которьй через элемент liTlM 35 запускает блок 44 (управления циклом Взять). С этого момента устройство работает точно так же, как и при реализации первого цикла. По окончании цикла Взять захват идет в а,п,рес, по достижении а/зреса реализуется цикл Положить, после
11
чего действия прекращаются, Второй цикл завершен.
При реализации третьего цикла устройство работает следующим образом.
Первоначально захват находится в произвольном положении, координаты которого X и У хранятся в счетчиках 10 и 11 соответств-енно.
Для реализации третьего цикла на пульте 1 необходимо выбрать номер ячейки, из которой необходимо взять rpyj. Этот номер записывается в счетчик 3. Далее, нажав элемент (кнопку 48) Взять, подготавливают блок 43 и устанавливают в 1 триггер 26. При этом запускается преобразование номера ячейки в ее координаты X и УЛ точно так же, как это
А г
описано. При этом новые значения X и У. записываются в счетчики-делители 4 и 5, а признак .стеллажа - в блок 46.
Затем элементом 47 формируется сигнал Пуск, которьш через эле- мент ИЛИ 33 поступает на входы Пуск блоков 41-43, но запускается только блок 43. При этом на выходе блока 43 формируется сигнал Движение в адрес, который через элемент ИЛИ 34 включает подцикл Движение в адрес. Движение в адрес осуществляется так лее, как описано при работе первого цикла. По окончании Двккения в адрес выходной сигнал формировате ля 28 через элемент ИЛИ 33 поступает на вход блока 43 и последний формирует сигнал Пуск цикла Взять, который через элемент ИЛИ 35 запускает блок 44. Цикл Взять реализуется точно так же, как это было описано с учетом направления, т.е. левого или правого стеллажа. Захват берет нужный груз. Сигнал Окончание цикла с выхода блока 44 через эле- мент ИЛИ 33 поступает на вход блока 43. Блок 43 формирует сигнал через элемент ИЛИ 37 Движение в нуль а затем формирует сигнал цикла Положить. Этот сигнал через эле- мент ИЛИ 39 запускает блок 45 (управления циклом Положить), причем, если на выходе дешифратора 27 имеет- ся CI гнал нулевого состояния, воздействующий на блок 46, то цикл По- ложить реализуется в левом варианте точно так же, как это описано. За- хват кладет груз. Сигнал Окончание
цикла с выхода блока 45 через элемент 1-ШИ 33 поступает на вход блока 43, но никаких внешних сигналов блок 43 не вырабатывает, а лишь производит внутренние сбросы. Третий цикл завершен. Связь пульта 1 со счетчиками 10 и 11 необходима для знесения исходной информации при вклчении питания, если захват не в нул
Блок 8 (.9) работает следующим образом (фиг. 2).
На первую группу входов суь мато- ров 52 и 53 подается обратный код X (УД) координаты X или У с выходов регистров 6 или 7 соответственно. Па вторую группу входов сумматоров 52 и 53 подается прямой код Xj , У текушд х координат X, У с выходов счетчиков 10 и И соответственно. В основу работы схемы заложен следующий алгоритм: Х. X. (У, У ), если код на выходе сумматоров (F) равен П 1 1 1 1 1 1 1, а перенос из старшего разряда отсутствует, т.е. С X . с Хд (У i Уд ) ,если FT 1 1 11 11 1 1 , а С1 0.(У Уд), если F + 111 1 П 1 1 , а С1 1 . Хд- XjU , то сигнал X. Х () формируется с помощью элемента И 57, элемента НЕ 54 и элемента И 56. Дей- твительно, если код F на выходах все разрядов сумматоров 52 и 53 равен единице, то на всех входах элемента П 57 присутствуют еди1Н1чные сигналы и, следовательно, имеется сигнал и на его выходе, который воздействует на вход элемента И 56, но на других ег о входах так;;:е единицы, так как на вьп :одак F , F , F сумматора 52 единицы, а на выходе С1 сумматора 53 - нуль, то на выходе элемента НЕ 54 - единица.
Сигнал X. Хд фop иpyeтcя с помощью элемента И 58, при совпадении сигналов С , снимаемого с выхода элемента НЕ 54 и сигнала f 11111111 снимаемого через элемент ПЕ 55 с выхода элемента И 56.
Сигнал X с помощью элемента И 59 при совпадении сигналов С1 1 с выхода Ci сумматора 53 и F 11111111 с выхода элемента НЕ 55.
Сигнал I Хд - Х| 1 4 формируется дешифратором, построенным на элементах И 60-63, ШШ 64 и НЕ 65-67. Элементы НЕ 65-67 служат соответственно для образования сигналов F , F , F, .
131
Сигналы на выходах элементов И 60-63 формируются при следующих кодах на выходах сумматоров 52 и 53; 1, 2, 3, 4, что отличается от состояния Х. X соответственно на 1, 2, 3, 4 импульса. Следовательно, на выходе элемента ИЛИ 64 имеется единичный сигнал только тогда, когда необходимо включить низкую скорость.
Задача блока 46 (фиг. 3) правиль- но выбирать направления движения захвата при реализации циклов Взять и Положить в зависимости от того, с каким стеллажом, левым или правым, реализуется тот или иной цикл. Кроме того, особым случаем является работа в. нуле, т.е. в положении загрузки, когда необходимо реализовать только левый цикл. Работает блок следующим образом.
Первоначально, сигналом предварительной установки триггер 68 устанавливается в нулевое состояние, что воспринимается блоком как работа с левым стеллажом. Если в процессе преобразования заданного номера ячейки в координаты X . и У счетчик-делитель 5 переполняется, то его импульс переполнения устанавливает триггер 68 в состояние единицы, что воспринимается, как команда работы с правым стеллажом.
Пусть теперь на любой из входов элемента ИЛИ 75 поступает сигнал; Прямое движение по координате Z. Если захват находится не в нуле, то сигнал нулевого положения, являющийся сигналом запрета для элементов И 7 и 71, отсутствует, поэтому сигнал прямого движения поступает на входы элементов И 70 и 71. Если триггер 68 находится в состоянии нуля (признак работы с левым стеллажом), то на выходе элемента И 70 появляется сигнал который устанавливает в состояние нуля триггер 69, а через элемент ИЛИ 78 включает движение захвата влево .
С приходом на любой из входов элемента ИЛИ 76 сигнала Обратное движение по координате и его выходной сигнал поступает на входы элементов И 73 и 74. Но в рассматриваемой ситуации открыт элемент И 73 и сигнал с его выхода через элемент ИЛИ 77 включает движение захвата вправо, т.е. к положению S. В слу- чае, если к моменту прихода сигнала
5
O s 0
5
Q
0
5
10314
Прямое движение по координате Z триггер 68 находится в состоянии единицы (признак работы с правым стеллажом), то сигнал с выхода элемента ИЛИ 75 проходит через элемент И 71, устанавливает в единицу триггер 69 и через элемент ИЛИ 77 включает правое движение по Z. С приходом, сигнала Обратное движение по координате Z на любой из входов элемента ИЛИ 76 13ЫХОДНОЙ с.игнал последнего поступает на ВХОДЫ элементов И 73 и 74, но теперь открывается элемент И 74. и сигнал с его выхода через элемент Р1ГШ 78 включает движение влево, что и необходимо при реализации соответствующих циклов.
В случае, если захват находится в нулевом состоянии (состоянии загрузки), необходимо всегда реаЛизо- вать левьш цикл. В этом случае на входы элементов И 70 и 71 воздействует сигнал О как запрет, но этот же сигнал через элемент НЕ 79 в качестве разрешающего присутствует на входе элемент И 72. Теперь сигнал Прямого двилсения по координате Z с выхода элемента ИЛИ 75 проходит через элемент И 72, устанавливает в нуль триггер 69 и через элемент ШИ 78 включает движение захвата влево. С приходом сигнала Обратное движение по координате и этот сигнал с выхода элемента ИЛИ 76 через элемент И 73 и элемент ИЛИ 77 включает движение захвата вправо.
Блок 41 (фиг. 4) работает следу- ющ.им образом.
Если при наличии сигнала нулевого положения захвата приходит сигнал Пологшть, то срабатьгаает элемент И 80 (f устанавливает в единицу триг- rej) 82, который сигналом предварительной установки сброшен в нуль.
С прюсодом сигнала Пуск по его заднему фронту на вход С регистра 83 с выхода триггера 82 записывается в младший разряд регистра 83 и на его первом выходе появляется сигнал / Пуск движения в адрес. Элемент И 81 в этот раз не срабатывает,, так как на его разрешающем входе сигнал появляется по окончании сигнала Пуск. Следующий сигнал Пуск, пройдя через элемент И 81, своим передним фронтом сбрасьшает в нуль триггер 82, а по задне -1у фронту вызьшает сдвиг единицы в регист15 1
ре 83, в результате чего на его втором выходе появляется сигнал Пуск цикла Взять. С приходом следующего сигнала Пуск происходит следующий сдвиг и формируется сигнал Пуск цикла Положить. Следующий сигнал Пуск вызьшает сброс сдвигового регистра в нули.
Блок 42 (фиг. 5) работает аналогично блоку 41 с той розницей, что условием его запуска, т.е. записи едишщы в RS-триггер 87, является отсутствие сигнала нуля на входе элемента НЕ 84, Только тогда по сигналу Положить открывается элемент И 85 и триггер 87 устанавливается в единицу. В остальном блок 42 работает аналогично блоку 41, но его регистр 88 сдвига выполнен четырехразрядным. Блок 42 последовательйо формирует четыре сигнала: Пуск движения в нуль, Пуск цикла Взять, Пуск движения в адрес, Пуск цикла Положить.
Блок 43 (фиг. 6) работает аналогично блоку 42 с той разницей, что запускается (записывается единица в триггер 89) непосредственно сигналом Взять. Последовательность сигналов,формируемых циклом:; Пуск двгокения в адрес, Пуск цикла Взять, Пуск движения в , Пуск цикла Положить.
Блок 44 (фиг. 7) работает следующим образом. .
Сигналом предварительной установки триггер 93 сброшен в ноль. С приодом сигнала Пуск по его переднему фронту триггер 93 устанавливается в состояние единицы, в результате чего единичный потенциал появляется на входе (А) последовательной записи регистра 95. Импульс, сформированный формирователем 92, из сигнала Пуск, пройдя через элемент ИЛИ 94, поступает на вход (С,) сдвига регистра 95 и своим задним фронтом записывает единицу в его первьй разряд. В результате на его первом выходе возникает Движение в положение без груза. С приходом от датчика 51 сигнал Захват в положение без груза этот сигнал, пройдя через элемент ИЛИ 94 и элемент И 96, своим передним фронтом сбрасывает в ноль RS-триггер 93, а своим задним фронтом сдвигает единицу в регистре 95.
10316
При этом формируется сигнал Прямого движения ПО координате Z. С пр11ходом сигнала Захват в левом положении (Z.) или Захват в правом положении (Z } с соответствующего
hi
датчика этэт сигнал через элемент РШИ 94 поступает на вход сдвига регистра 95 и сдвигает единицу в следующий разряд.
При этом фop fflpyeтcя сигнал Дни-- жение в положение с грузом. С приходом от датчика 50 сигнала Захват в положение с грузом (У) на выходе элемента РШИ 94 появляется сигнал,
сдвигающий единицу в регистре 95. При этом формируется сигнал Обратное движение по координате Z. С приходом ответа Захват в нулевое поло- . жение по координате Z (2) с датчика обратной связи Z ,сигнал, пройдя через элемент И 97, формирует сигнал Окончание цикла и одновременно по своему заднему фронту сбрасрлвает в ноль регистр 97, Цикл закончен.
Отличие в работе блока 45 (фиг,8) от блока 44 сос тоит лишь в последовательности формируемых сигналов, а именно: Движение в положение с грузом, Прямое движение по координате Z, Движение в положение без
груза, Обратное движение по коордите Z, Окончание цикла.
Дешифратор 27 (фиг. 9),работает следующим образом.
Если Хд 00000000, то Хд
11111111 и если У 00000000, то У 1 1 П 11 1 1, тогда при Xf, О и Уд О сигналы имеются на входах элемента И 106 и, следовательно, на его
выходе. По окончании движения по координатам X и У соблюдается условие X, X., У( , в этот момент приходит сигнал на второй вход элемента И 107 и на его выходе появляется
сигнал Захват в нуле.
Предлагаемое устройство обеспечивает возможность работы с двухстоеч- ными автоматизированными складами, при этом число ячеек в ряду и число
рядов ячеек может быть произвольно, сложные фотоэлектрические вводные устройства отсутствуют, что чрезвычайно упрощает конструкцию в целом, количество простейших датчиков обратных связей (магнит + геркоп) всего шесть, и также на зависит от числа ячеек, следовательно, минимально и число связей с электроавтоматикой.
1
программирование упрощено до предела и не требует ни кодовых жетонов, ни перфокарт, автоматическое вычисление момента смены скоростей и обеспечение одновремепног о движения по ко- ординатам сокращает приблизительно на 20% время цикла Взять, Положить. Упрощение конструкции за ечет отказа от сложных фотосчитьшающих вводных устройств, упрощения датчи-- ков, уменьшения .-числа связей, упрощения cxeMii управлениг приводит к упро1деиию блоков питания и развязок.
Формула и 3 о б р е т е н и я
Устройство для программного управления захватом aBTOoinjpa roj a, содержащее элемеил запуска,, первый ре- версивнглй счетчик 5 установочные вход которого через шифратор сое.дипены с первым BbixojiOM пульта управлеппя, вы читаюицтй вход -- с вь содом первого элемента И, а управляющий вход - с вторым вькодоь пульта управления, гс нератор импульсов, связанный с первым входом ггервого элемепта И, и для калсдой из двух координат - буферный реп-тетр, BTOpof i реверсивнъп
счетчик, подключенюлй сумми1:|угош,им.
и вычитаю1цим взгодами к вьи-;одам вторы элементов И данной координаты, а управляющим входом - к третьему выходу пульта управлеп1- яэ и блоки сравнения каждый из которых содерхзп два ком- бинаттрюкных сумматора, соединенны информащюнкыми вхо,г1амк с вгац юдами буферного регистра и второго реаео- сивного счетчика данлюй координаты, четыре элемента И и два элемента НЕ, выход первого из которьк соединен с .первыми входами третьего и чем верто- го элементов И, а выход второго с вторым входом третьei o и входом пятого элементов И, .первый., второй и третий вькоды первого комбинационного сумматора подключены к вторьм входам пятого элемепта И, а четвертый выход, к первому входу шестого элемента И, связанного вы- ходом с третьим входом пятого элемента И, а втopы ш входа1.ет - с выходами четырех разрядов второго комби- нацконного сумматора, В1яход переноса которого 1юдк,гаочен к входу второго элемента НЕ и второму входу ч етвер- того элемента И, выход пятого элемента Н подсоединен к входу первог
318 ,
:шеме1гга НЕ, выхо,ды третьег О и четвертого элементов И связаны с пер-- вьми входами вторьк э.пемептов И данной координаты и с выходами устройства, а BTopjiie входы вторых элементов И первой координаты- соедз1нены с выходом датчика неремещения захвата по первой координате, о т л и - ч а ю щ е е с я тем, что, с целью упрощеь кя устройства и расширения области применения путем возможности уп.равлеиия захватом автооператора Г О трем координатам, в устройство введены седьмой и восьмой элементы К, с первох о но одиннадцатый элементы ШШ, третий НЕ, НС-триггер, первый к второй RS-триггеры,. дешифратор ну,ля5 первый формирова-- те.ль ш-нгульса, э.пементь1 задания режима,, д;з.. пред.ельпого положения захвата по третьей координате, датчик нулевого ноло. захвата по второй i-i третьей координатам, дат- ЧГ5КИ положения захвата с грузом: и без груза по третьей координате, п.я- гъ блоков упра.в.ления н иклом, со- стоящк-с соответственно из девятот о к десятого э,пемевтов И, -гретьет о Б8--триггера, четвертого элемента, ИЕ и первого регистра сдвигг ; одиннадцатого и двенадцатого элементов И, чет1зе;П, ого ВЗ-трити ера, пятог-о элемента НЕ и BTopoi o регистра ,1ятого ЕВ- грип ера, тринадцатого элемента И н ч ретьего рег исг ра сдвигс, втор.ого ОАГрмирователя икнульса, шесто: о З-триггера.. двенадцатого элемента , четырнадцатого и нятпадцато- | о элементов И, че гвертого регистра сдвутга li третьего формирователя импульса,, седьмого RS-триггера, три- падпатс го элемепта ШШ, таестнадцато- го 1.V сймнадцатоА о элементов И и пя- i о Г о Р е Г и С; т р а с д i i и г а , в у с т р о и с т в о введены б.пок определения пере- :.jeiucHK.H захвата по третьей координате... состоящ ий из восьмого и. де.ятого лЗ-т ригт еров, с 13осемнадцатого по ,, : - ДЦЯ 1 ь второй элементов И. с че- .i:bip:iianLf,aToro по семнадцатый элементов iiHI f и шестого э.пемента НЕ, для первой и второй координат - счетчики- . лелптелгт,, а в блоки сравнения первой . второй координат введены с дв.аддать ч ре.гьег о по двадцать шестой элементы И, 1 осемпадп,атьй элемент ИЛИ и седьмой:,,, восьмой и девятый элементы: НЕ, С-вход 1К --триггера соед1-П1еп
с выходом генератора импульсов, выход - с вторым входом первого элемента И,; а I- и К-входы с выходами первого RS-триггера, подключенного S-входами к выходам элементов зада- ния режима и R-входом - к выходу переполнения первого реверсивного счетчика, выход первого элемента И связан со счетным входом счетчика делителя первой координаты, выход пере- полнения которого подсоединен к счетном- входу суетчика-делителя второй координаты, выход пятого элемента И блока сравнения первой координаты соединен с одним из вькодов устрой- ства, с S-входом второго RS-триггера. и с первым входом восьмого элемента И, подключенного вторым входом к выходу пятого элемента И блока сравнения второй координаты и к пер- вому входу десятого элемента 1-ШИ, выход которого соединен с одним из выходов устройства, а второй вход - с выходом четвертого элемента ЖШ и через третий элемент НЕ с первьп входом седьмого элемента И, связанного выходом с вторыми входами вторых элементов И второй координаты, а вторым входом через первый элемент ИЛИ с выходами датчиков положений захват с грузом и без груза по второй коор- динате и с первыми входами двенадца- того и тринадцатого элементов ИГШ, подключерн1ых вторыми входами к выходам датчиков предельных положений захвата по третьей координате, со- ,единенным через восьмой элемент ИЛИ с В-входом второго RS-триггера, вы- ход восьмого элемента И через первый формирователь импульса .соединен с пер вым входом пятого элемента 1Ш.1, второй вход которого подключен к выходу элемента запуска, третьи входы - к выходам пятнадцатого и семнадцатого элементов И, а выход - к первым вхо дам десятого, двенадцатого и тринадцатого элементов И и к синхровходам первого, второго и третьего регистров сдвига, входы дешифратора нуля соединены с выходами буферных регистров первой и второй координат и с выходок восьмого элемента И, а выход с входами четвертого, пятого элементов НЕ,с вторым-входом девятого элемента И и с первыми входами восемнадцатого и девятнадцатого элементов И, подключенных вторыми входами к входу двадцатого элемента И
j )о 5 20 25 д g j
5
10320
и к выходу четырнадцатого элемента ШШ, входы которого подсоединены к первым выходам четвертого и пятого регистров сдвига, выход первого элемента задания режима соединен с В-входом пятого RS-триггера, подключенного выходом к информационному входу третьего регистра сдвига, а Н-входом - к выходу тринадцатого элемента И, выход второго элемента задания режима подсоединен к первым входам девятого и одиннадцатого элементов И, выход четвертого элемента НЕ Связан с вторым входом девятого элемента И, выход которого соединен с В-вхОдом третьего RS-триггера, подключенного выходом к информационному входу перво1 о регистра сдвига и R-входом к выходу десятого элемента И, второй вход которого соединен с первым выходом первого регистра сдвига и с первым входом шестого элемента Ш1И, связанного вторым входом с первым выходом второго регистра сдвига, третьим входом - с первым выходом третьего регистра сдвига, подключенным к BTopor jy входу тринадцатого элемента И, а выходом - к синх- ровходам буферных регистров первой и второй координат, второй выход первого регистра сдвига подсоединен к первому входу седьмого элемента ИЛИ, с вторыьш входами которого соединены вторые выходы второго и третьего регистров сдвига, а с выходом - S-вход шестого RS-триггера и через второй формирователь импульса третий вход двенадцатого элемента ИЛИ, четвертьп вход которого подключен к выходу датчика нулевого положения захвата по второй и третий координат-ам и к первому входу пятнадцатого элемента И, третий выход первого регистра сдвига соединен с нервьм входом од1 ннадцато- го элемента ШШ, связанного вторыми входами с третьим выходами второго и третьего регистров сдвига, четвертый выход третьего регистра сдвига подключен к первому входу девятого элемента ИШ-f, второй вход которого соединен с четвертым выходом второго регистра сдвига и с вторьм входом двенадцатого элемента И, связанного выходом с R-входом четвертого -RS- триггера, выход которого подключен к информационном входу второго регистра сдвига, а S-вход - к выходу одиннадцатого элемента И, соединенно251
(1 вх(1дом с выходом пятот о элемента ИГ , выход девятого элемента И1М подключен к входу сброса буферных регистров первой и второй координат, выход двенадцатого элемента ИЛИ со- единен с синхровходом четвертого регистра сдвига и с первым входом четырнадцатого элемента И, выходом подключенного к F.-входу шестого В3-триг гера, связанного выходом с информа- 1ЩОННЫМ входом четвертого регистра сдвига, второй выход которого подсоединен к второму входу четырнадцатого элемента И и к первому входу третьего элемента ИЛИ, подключенного вы- ходом к одному из выходов устройства вторым входом - к выходу третьего элемента И блока сравнения второй координаты, а третьим входом - к второму выходу пятого регистра сдвига, информационный вход которого связан с выходом седьмого RS-триггера, а синхровход - с первым входом шестнадцатого элемента И и с выходом тринадцатого элемента ИШ1, третий вход ко- торого соединен с выходом датчика нулевого положения захвата по второй и третьей координатам и с первым входом семнадцатого элемента И, а четвертый вход через третий фop tиpoвa- тель импульса - с выходом одрпгнадца- того элемента ИЛИ и 3--входом седьмого BS-триггера, R-входом подключенного к выходу шестнадцатого элемента И, второй вход которого связан с вторьм выходом пятого регистра сдвига и с первыми входами второго и четвертого элементов ИЛИ, подключенных вторыми входами к третьим выходам четвертого и пятого регистров сдвига четвертые выходы которьпс подсоединены к входам пятнадцатого элемента ИЛИ, соединенного выходом с первыми входами двадцать первого и два,д цать-второго элементов И, вторые входы которых связаны с выходами девятого RS-триггера5 а выходы - с первыми входами соответственно шестнадцатого и семнадцатого элементов ИЛИэ соединенных выходами с одними из выходов устройства, выход нереполне
0322
ния счетчика-делителя второй координаты подключен к входу восьмого RS- триггера, связанного выходами с третьими входами восемнадцатого и девятнадцатого элементов И, выход каждого из которых соединен соответственно с R- и В-входами девятого RS-триггера, связанными с вторыми входами семнадцатого и шестнадцатого элементов ШШ соответственно, второй вход двадцатого элемента И подключен к выходу шестого элемента НЕ, а выход к R-входу девятого RS-триггера и третье гу входу семнадцатого элемента ИЛИ., вторые входы пятнадцатого и семнадцатого элементов И соединены с четвертыми выходами соответственно четвертого и пятого регистров сдвига, причем в калсдом блоке сравнения выходы с два,ддать третьего по двадцать шестой элементов И подключены к вь ходам восемнадцатого элемента ИЛИ а первь е входы - к выходу шестого элемента И, вторые входы двадцать третьего и двадцать пятого элементов И связаны через седьмой элемент НЕ с четвертым выходом первого комбинационного сумматора, соединенным с вторыми входами двадцать чет- )зертого и двадцать пятого элементов И, третьи входы двадцать четвер- 1 ого и двадцать девятого элементов И подключены через восьмой элемент НЕ к первому выходу первого комбинационного сумматора, связанному с третьими входами двадцать третьего и двадцать -шестого элементов И, четвертый вход двадцать шестого элемента И через девятьш элемент. НЕ соединен с вторым вьЕ-содом первого комбинационного сумматора, подключенным к четвертым входам двадцать третьего, двадцать четвертого и двадцать пятого элементов И, разрядные выходы счетчи ков-де. штелей первой и второй координат подсоединены с информационным входам буферного регистра соответст- :зуюи1;ей координаты, а выходы восем- надца.тв,1Х элементов ИЛИ и второго RS- триггера ЯВЛЯЕОТСЯ одними из выходов устройства,
(VffUH/VftaHc
k
5
LJ &Hj fOi/SNtie oSmnwo e
I УЛ l iiujyifytii |Ш ««1В щ«|я,яд|. и. Hi,%n...jcT.|i;
Щ &&итения
(Тт. 2.
т
fltnS
атщ
т
От 45
75
№u)K.
3QWUта
StuHeHue захвати только влеКо
т
1
11
4i.J
О
ПОЛОН и7Ь
пу
т
S
Пуск
Писк
ПУ
Ц
Пуск А&,8 Адрес
Пусн цинпа §уять
nyck i4Lffi/ia полотигь
Фиг. //
5
и/йгж. . . -у dHJitJ
-Прямое dSuifi.noHoopB.i . И И -lPl-9
1 iifj- fti/uu.
. 6 подоен, сгрулом .
-
Off/}amHoe ffu)f. по
HoopduH z пуск offp. кода
Р
Омончан /е цикла
на 33
Фиг. 7
лу
досд§г до zo :
ДОСгп ЛОСгп ДОС у 2
. ЗакЗат Sftyj e
.
fj. Прабми ц(Л1И
Л
-г
i l
I0J™J
Авижвиие S ty,y положение: с ерузом
fJpMoTWUMme потординат
- -шро
{ПускП.}
пот. дез spt/за.
, ди.)нение в по лот. „.
Обратное д6ин по наординате z
Понец цинм положить
Л
I,
Л
левый цим праёыи цик/1
Фиг. 11
Составитель И. Белинкова Редактор Н. Бобкова Техред Л.Сердюкова Корректор Е. Рошко
Заказ 2768/48 Тираж 836 11од1шсное
BHIfflnii Государственного комитета ССС Р
по делам изобретений и открытий 113035, Москва, , Раушская наб., д 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
aoflomsHi/e Ses ФигЛЗ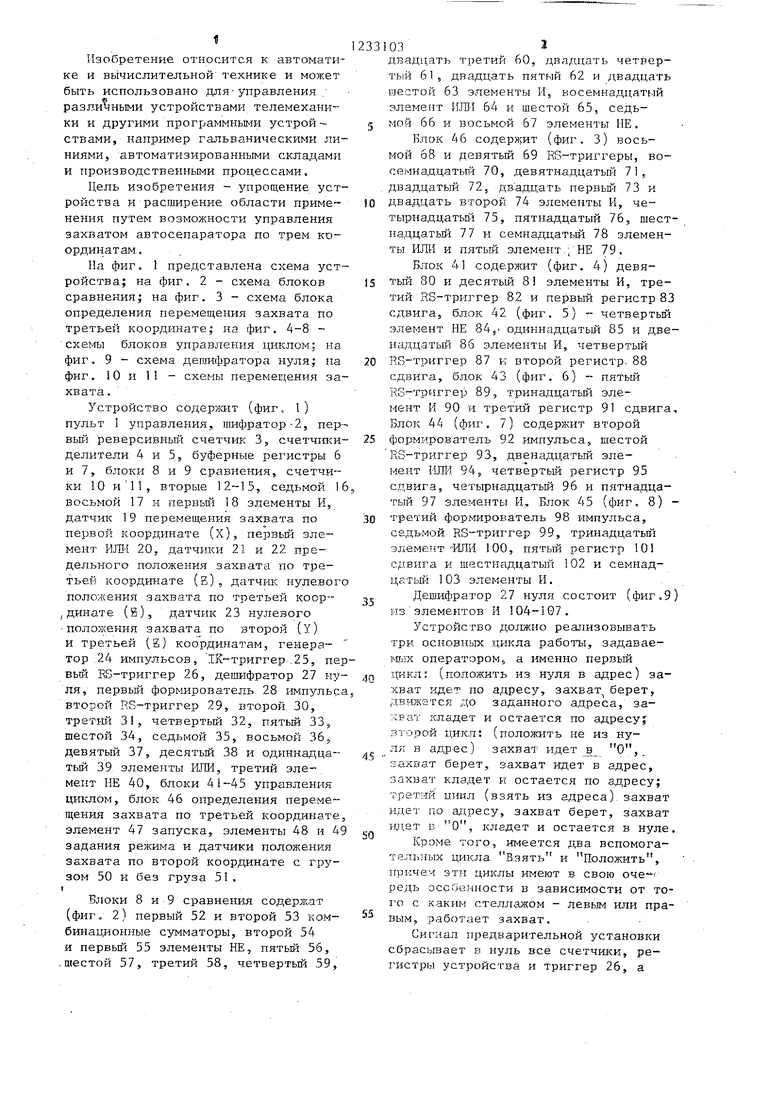
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления захватом автооператора | 1985 |
|
SU1506436A2 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ М-ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1994 |
|
RU2112313C1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления различными устройствами телемеханики и другими программными уст- рор1ствами, например гальваническими линиями, автоматизированными складами и производственными процессами. Цель изобретения - упрощение устройства и распмрение области .применения путем возможности управления захватом автооператора по трем координатам. Устройство содержит пульт управления, элементы И, НЕ, ЮШ, RS- триггеры, IFI-триггер, генератор им- пульсов, блок сравнепия, комбинационные су№)аторы, датчики положения захвата по координатам и блоки управления циклом. Устройство обеспечивает возможность работы с двухстоечны- ми автоматиз1 рованньми складами, при этом число ячеек в ряду и число рядов быть произвольным, сложные фотоэлектрические вводные устройства отсутствуют, что чрезвычайно упрощает конструкцию и позволяет использовать простейшие датчики обратных связей, количество которых также пе зависит от количества яче-- ек, следовательно минимально и количество связей с электроавтоматикой. Программирование упрощено и не требует ни кодовых жетонов, ни перфокарт, автоматическое вычисленное момента смепы скоростей и обеспечение одновременного движения по координатам сокращает время Взять, Положить. Все это позволяет упростить блокн литания и развязок. П ил. (О (Л ьо оо со
| Устройство для программного управления | 1975 |
|
SU600525A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство цифрового программного управления | 1976 |
|
SU601663A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
