(54) КОНТЕЙНЕРОВОЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Контейнеровоз | 1980 |
|
SU921901A1 |
| Контейнеровоз | 1978 |
|
SU691316A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Контейнеровоз | 1984 |
|
SU1220960A2 |
| Контейнеровоз | 1984 |
|
SU1194725A1 |
| Контейнеровоз | 1987 |
|
SU1507611A2 |
| Транспортное средство | 1984 |
|
SU1152821A1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
1
Изобретение относится к подъемнотранспортным машинам и может быть исполъзовано для погрузки, разгрузки и перевозки различных грузов в контейнерах.
По основному авт. св. № 691316 известен контейнеровоз, содержащий вилкообразную раму с напорными колесами, установленный на ней шарнирно складывающийся Подъемный механизм, телескопическую раму с закрепленной на ее подвижной части поворотной рамкой, выполненные из продольных лонжеронов, соединенных между собой поперечинами, гидроцилиндры для подъема, горизонтального перемещения и опрокидывания контейнера, фиксатор телескопической рамы и фиксатор поворотной рамки 1.
Однако известный контейнеровоз предназначен для транспортировки одного контейнера. При перевозке легковесных грузов, например большинства сельскохозяйственных грузов, грузоподъемность этого контейнеровоза значительно снижается, что приводит к снижению его производительности на транспортных работах.
Цель изобретения - повышение грузоподъемности контейнеровоза.
Для достижения указанной цели контейнеровоз снабжен жестко прикрепленной к передней части вилкообразной рамы опорной платформой с ограждением, при этом поперечины обеих частей телескопичес5 кой рамы и поворотной рамки выполнены П-образными и установлены вертикально с возможностью охватывания поперечиной неподвижной части телескопической рамы поперечин ее подвижной части и поворот10 ной рамки.
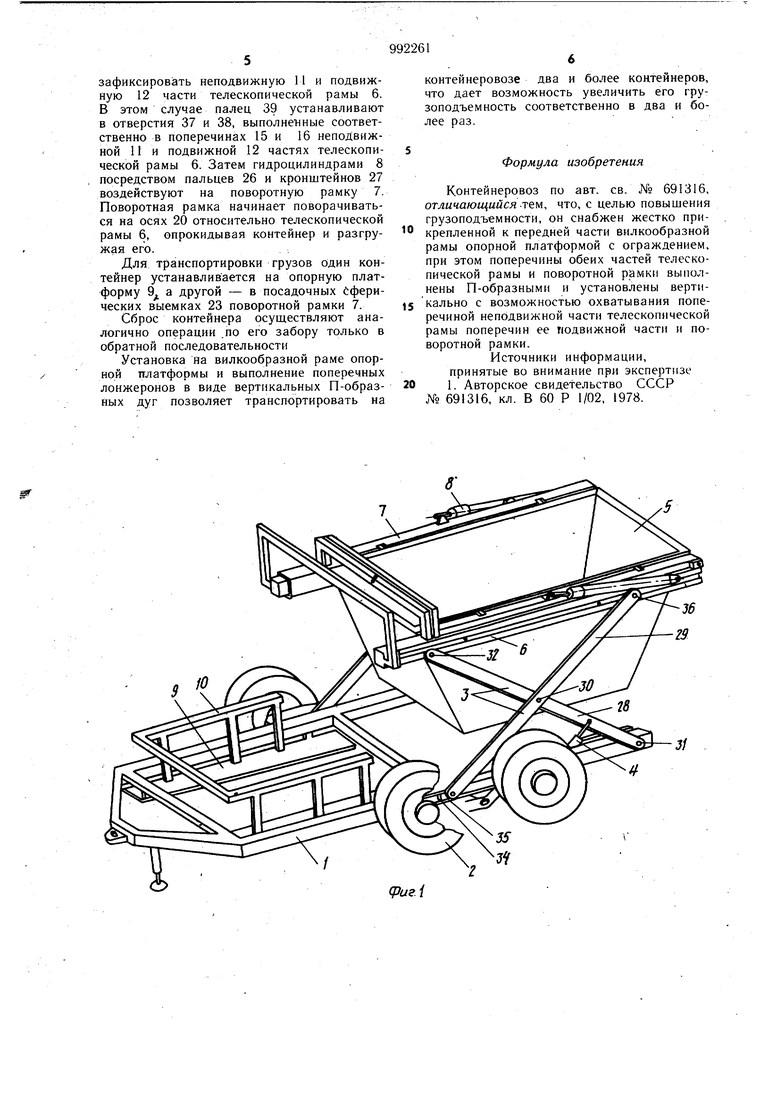
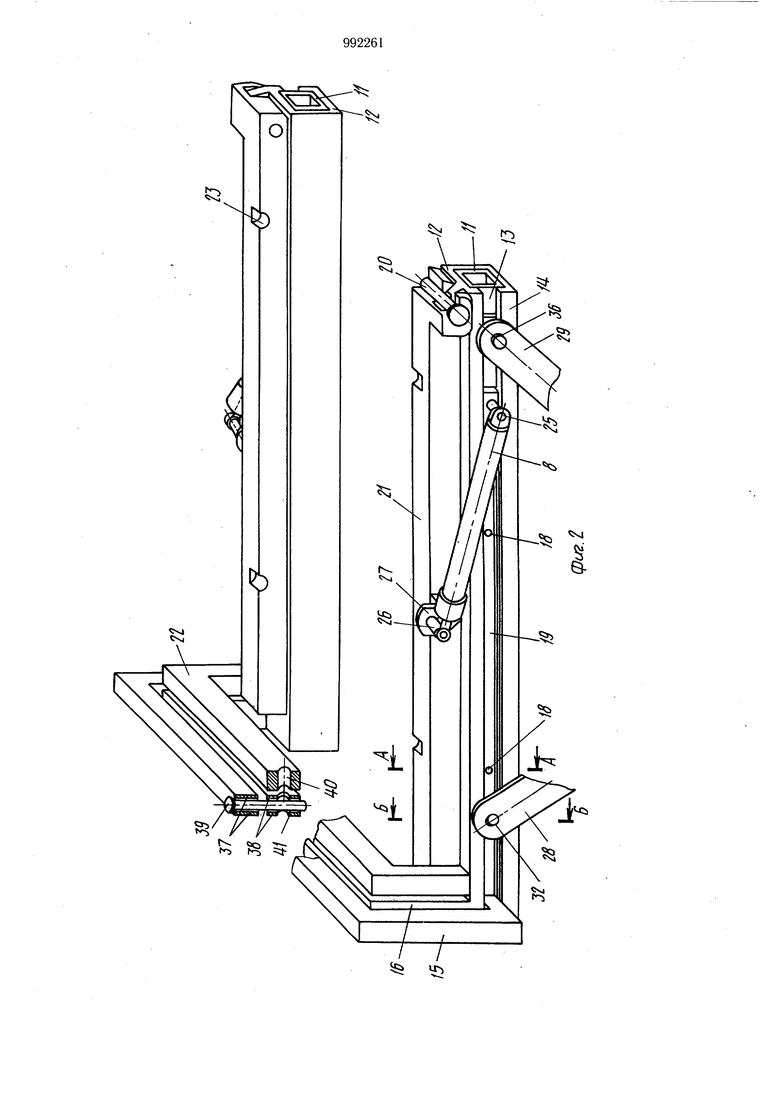
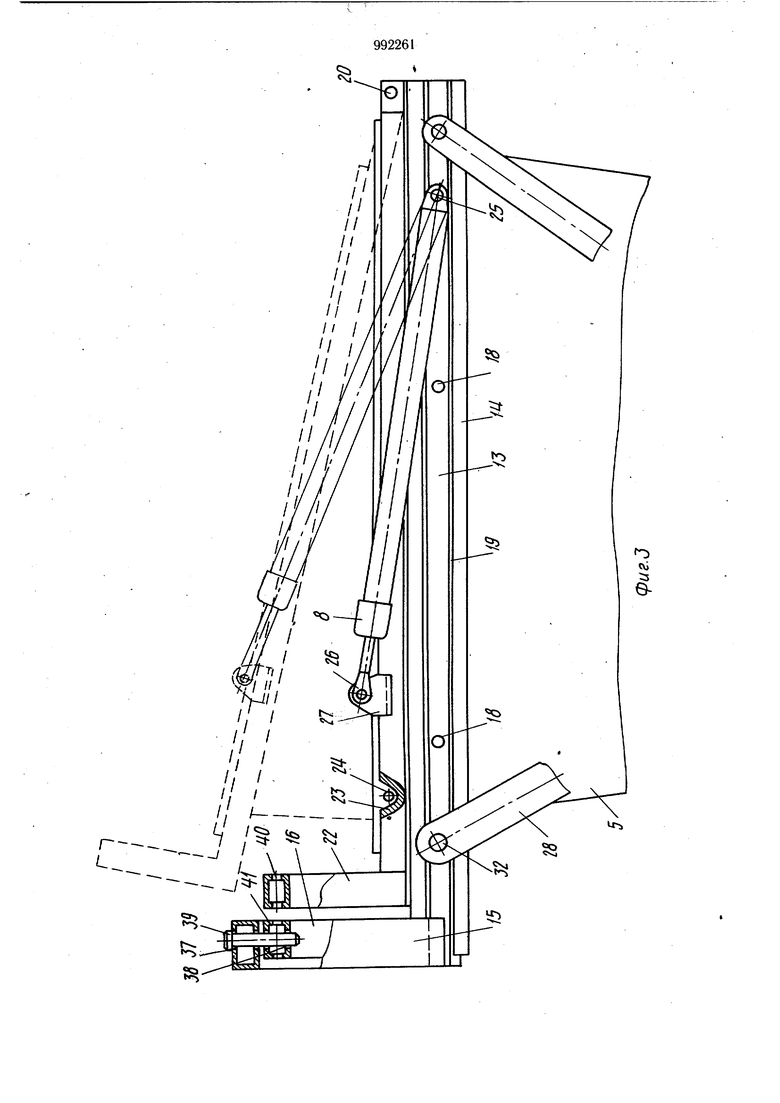
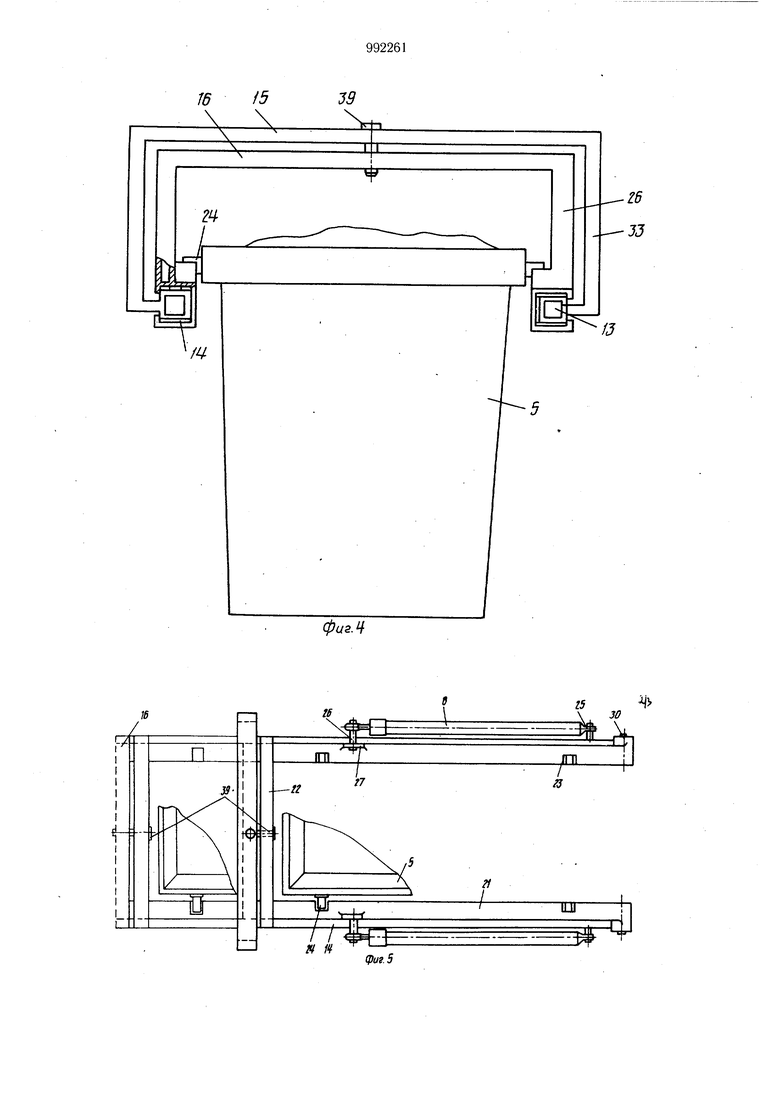
На фиг. 1 изображен контейнеровоз, общий вид; на фиг. 2 - телескопическая рама и поворотная рамка; на фиг. 3 - то же, вид сбоку; на фиг. 4 - то же, вид спереди; на фиг. 5 - то же, вид сверху;
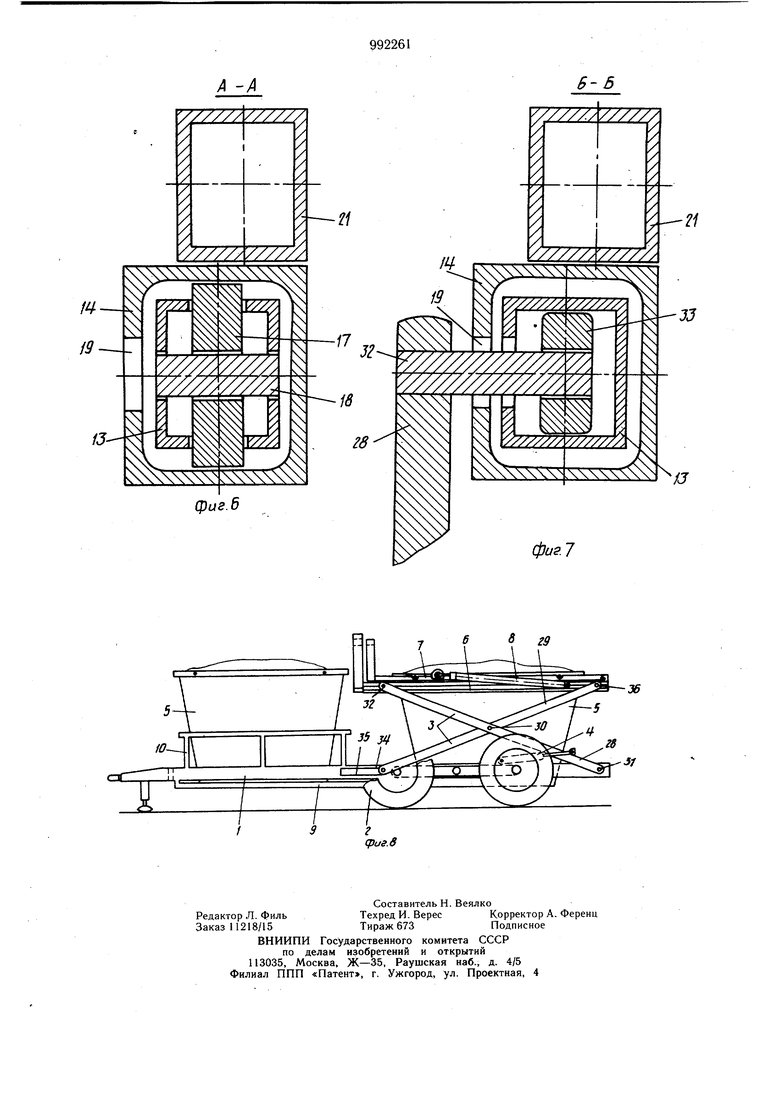
15 на фиг. 6 - сечение А-А на фиг. 2; на фиг. 7 - сечение Б-Б на фиг. 2; на фиг. 8 - контейнеровоз, вид сбоку.
Контейнеровоз состоит из вилкообразной рамы 1 с опорными колесами 2, шар2Q нирно складывающегося подъемного механизма 3, гидроцилиндров 4 для подъема контейнера 5, телескопической рамы 6, поворотной рамки 7, гидроцилиндров 8 для горизонтального перемещения и опрокидывания контейнера, опорной платформы 9 с
ограждением 10, фиксатора телескопической рамы и фиксатора поворотной рамки.
Телескопическая рама 6 установлена на шарнирно складывающемся подъемном механизме 3 и состоит из неподвижной 11 и подвижной 12 частей. Неподвижная и подвижная части телескопической рамы состоят из продольных лонжеронов 13 и 14, соединенных между собой поперечинами 15 и 16, выполненными в виде вертикальных П-образных дуг. Продольные лонжероны 13 неподвижной части 11 телескопической рамы 6 охватываются продольными лонжеронами 14 подвижной части 12 телескопической рамы 6, которые в свою очередь опираются на катки 17, установленные на осях 18, закрепленных в продольных лонжеронах 13 неподвижной части 11. Поперечина 15 неподвижной части 11 телескопической рамы проходит через продольную прорезь 19 в подвижной части 12.
На телескопической раме 6 установлена поворотная рамка 7, соединенная с ней осями 20. Эта рамка состоит из продольных лонжеронов 21, соединенных между собой поперечиной 22, выполненной в виде вертикальной П-образной дуги. Поперечина 22 и поперечина 16 подвижной части 12 телескопической рамы 6 охватываются поперечиной 15 неподвижной части 11 тег лескйпической рамы 6 для обеспечения возможности их взаимного пере.мещения. В продольных лонжеронах 21 поворотной рамки выполнены посадочные сферические выемки 23 под паль-цы 24 контейнера 5.
Гидроцилиндры 8 для горизонтального перемещения и опрокидывания контейнера 5 закреплены на осях 25, соединенных с неподвижной частью 11 телескопической рамы 6 и взаимосвязаны посредством осей 26 и кронштейнов 27 с поворотной рамкой 7.
Шарнирно складывающийся подъемный механизм состоит из подъемных рычагов 28 и 29, соединенных между собой осями 30. Подъемные рычаги 28 одними концами щарнирно закреплены на осях 31, соединенных с вилкообразной рамой 1,а другими -соединены с осями 32 катков 33, перемещающихся по внутренней поверхности продольных лонжеронов 13 неподвижной части 1) телескопической рамы 6. Оси 30 установлены в продольных прорезях 19 лон; еронов 14 подвижной части 12 телескопической рамы 6 и продольных прорезях в неподвижной части 11 этой рамы. Подъемные рычаги 29 одними концами закреплены на катках 34, установленных в направляющих 35, соединенных с вилкообразной рамой 1, а другими - соединены с осями 36, закреп-ленными в неподвижной чакта 11 телескопической рамы 6. Этот механизм приводится в движение гидроцилиндрами 4, закрепленными на вилкообразной раме-и соединенными с подъемными рычагами 28.
Фиксатор телескопической рамы 6 выполнен в виде отверстия 37 в поперечине 15 ее Неподвижной части 11, отверстия 38 в поперечине 16 ее подвижной части 12 и входящего в них пальца 39. Фиксатор поворотной рамки 7 выполнен в виде отверстия 40 в ее поперечине 22, отверстия 41 в поперечине 16 подвижной части 12 телескопической рамы 6 и входящего в них пальца 39.
Q Опорная платформа 9 для перевозки дополнительных контейнеров с ограждением 10 прикреплена к передней части вилкообразной рамы 1.
Во время работы контейнеров может выполнять следующие операции: забор
5 контейнера,установкаконтейнера
на опорную платформу, съем контейнера с опорной платформы, транспортировка контейнера, разгрузка контейнера и сброс контейнера.
При заборе контейнера гидроцилиндром 4 телескопическую раму 6 устанавливают в нижнее положение. Зате.м контейнеровоз подается назад, охватывая вилкообразной рамой 1 контейнер до упора последнего в поперечину 22 поворотной рамки 7. В этом
5 положении пальцы 24 контейнера находятся над посадочными сферическими выемками 23 в продольных лонжеронах 21 поворотной рамки 7. Далее гидроцилиндром 4, воздействуя на щарнирно складывающийся подъемный механизм 3, захватывают
контейнер 5.
Для установки контейнера на опорную платформу 9 необходимо зафиксировать поворотную рамку 7 на подвижной части 12 телескопической рамы 6. В этом случае па5 лец 39 устанавливают в отверстия 40 и 41, выполненные соответственно в поперечинах 22 и 16 поворотной рамки 7 и подвижной части 12 телескопической рамы 6. Гидроцилиндрами 8 посредством пальцев 26 и кронщтейнов 27 воздействуют на пово0 ротную рамку 7, которая совместно с подвижной частью 12 перемещается в продольном направлении относительно неподвиж-. ной части 11 телескопической рамы 6. При этом поперечины 22 и 16 проходят вну, три поперечины 15. В момент, когда контейнер 5 занимает положение над платформой 9, гидроцилиндром 4 опускают телескопическую раму 6 до выхода пальцев 24 из посадочных сферических выемок 23. Контейнер становится на опорную платфор0 му. Далее гидроцилиндром вдвигают подвижную часть 12 телескопической рамы 6. При этом поперечины 22 и 16 свободно проходят над контейнером 5, не захватывая его. Съем контейнера 5 с опорной платформы 9 осуществляют аналогично операции по
его установке на платформу только в обратной последовательности.
Для разгрузки контейнера, установленного на поворотной рамке 7, необходимо
зафиксиров1ать неподвижную 11 и подвижную 12 части телескопической рамы 6. В этом случае палец 39 устанавливают в отверстия 37 и 38, выполненные соответственно в поперечинах 15 и 16 неподвижной 11 и подвижной 12 частях телескопической рамы 6. Затем гидроцилиндрами 8 посредством пальцев 26 и кронштейнов 27 воздействуют на поворотную рамку 7. Поворотная рамка начинает поворачиваться на осях 20 относительно телескопической рамы 6, опрокидывая контейнер и разгружая его.
Для транспортировки грузов один контейнер устанавливается на опорную платформу 9 а другой - в посадочных Сферических выемках 23 поворотной рамки 7.
Сброс контейнера осуществляют аналогично операции .по его забору только в обратной последовательности
Установка на вилкообразной раме опорной платформы и выполнение поперечных лонжеронов в виде вертикальных П-образных дуг позволяет транспортировать на
контейнеровозе два и более контейнеров, что дает возможность увеличить его грузоподъемность соответственно в два и более раз.
Формула изобретения
Контейнеровоз по авт. св. № 691316. отличающийся-тем, что, с целью повышения грузоподъемности, он снабжен жестко прикрепленной к передней части вилкообразной рамы опорной платформой с ограждением, при этом поперечины обеих частей телескопической рамы и поворотной рамки выполнены П-образными и установлены вертикально с возможностью охватывания поперечиной неподвижной части телескопической рамы поперечин ее подвижной части и поворотной рамки.
Источники информации, принятые во внимание при экспертизе
U)
r L
9
Г6 f5
24п
7
фиг. Ч
/д
/
П
im
-//
t
/
/J
15
30
im
а
21
IUI
фиг. 5 У////У У/////////А y/7/9%W//-. фиг.6 /////////////7 фиг7
