(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВ.ПЕНИЯ С АДАПТИВНЫМ ПОЗИЦИОНИРОВАНИЕМ ПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления | 1981 |
|
SU962856A2 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Цифровая система программного управления | 1987 |
|
SU1411710A1 |
| Цифровая система для программного управления | 1987 |
|
SU1441352A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Цифровая система программного управления | 1987 |
|
SU1460713A1 |
| Цифровая система программного управления | 1980 |
|
SU924673A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Цифровая система программного управления | 1988 |
|
SU1508192A1 |
| Устройство для программного управления | 1984 |
|
SU1229730A1 |
Изобретение относится к автоматичес кому управлению следящими приводами и может быть применено в цифровых сис темах управления перемещением различн объектов. Известна цифровая система програм) много управления, содержащая входное устройство, блок текущего положения управляемого объекта, цифровую часть сравнения заданного и текущего значени положения объекта, воздействующую на релейнъ1й блох управления перемещением объекта, соединенный через редуктор и датчик обратной связи с блоком текущего положения объекта l Недостатком данной системы является то, что релейный блок управления обеспечивает наиболее й 1строе торможение лшпь малоинерционных объектов с малыми скоростями, а при большой скорости и массе объекта управления не позволяет остановить его в заданном положении, а это приводит к снижению точности и быстродействия системъ в целом. Наиболее близким по техническому рещению к данному изобретению является цифровая система программного управления, содержащая последовательно соединенные блок управления, датчик перемещения, сумматор, вход которого соединен с въкодом блока задания программы, а выходы старщих разрядов сумматора подключены к входам элемента ИЛИ, блок Выделения разрядов, один вход которого соединен с въкодом элемента ИЛИ, а другие входы подключены к соответствующим выходам младщих разрядов сумматора, преобразователь код-напряжение и усилитель 2 . Недостатком данной системы является одностороннее схемное програтлмирование движения привода, в то время как скорость следящего привода в большинстве случаев обуславливается целым рядом технологических причин.
Цель изофетения - повышетгае точности и быстродействия системы.
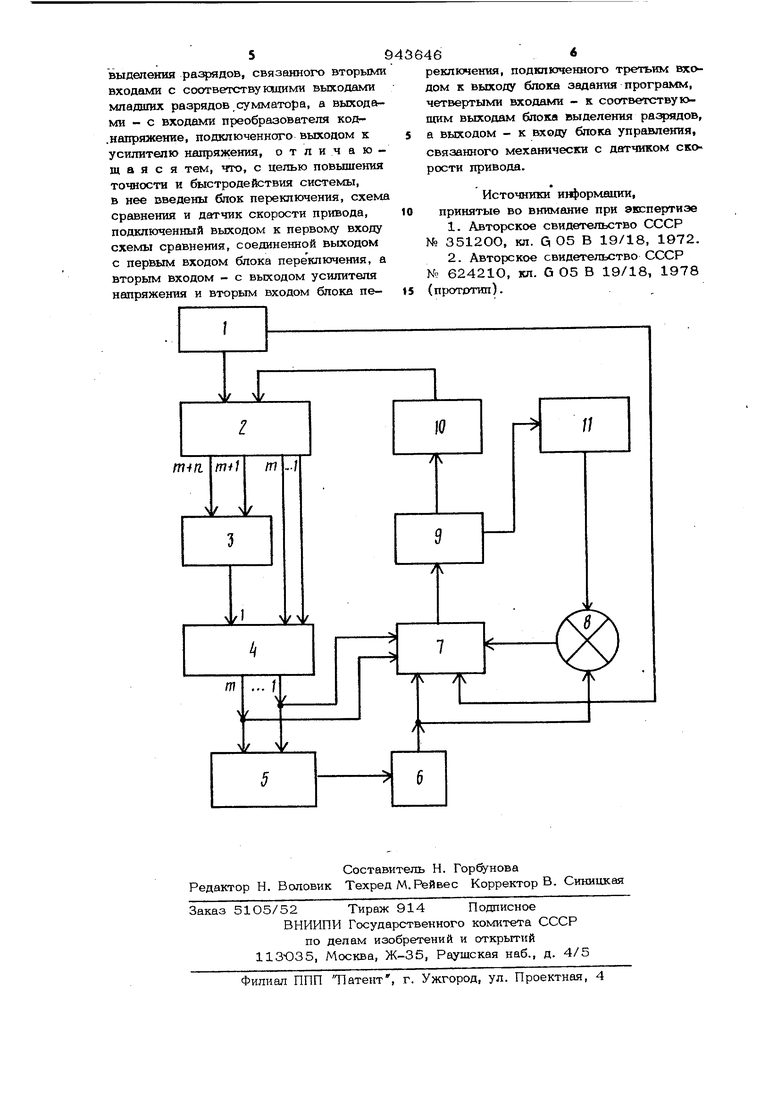
Поставленная цель достигается тем, что в цифровую систему программного управления с адаптивным позиционированием привода, содержащую включенные последовательно блок управления, датчик перемещения и сумматор, соединенный вторым в/содом с выходом блока задания программ, а выходами старших разрядов С входами элемет-а ИЛИ, подключегшого выходом к первому входу блока выделения разрядов, связанного вторыми входами с соответствующими выходами младщих разрядов сумматора, а выходами - с входами преобразователя коднапряжение, подключенного выходом к усилителю напряжения, введены блок переключения, схема сравнения и датчик скорости привода, подключенный выходом к первому ВХОДУ схемы сравнения, соединенный выходом с первым входом блог ка переключения, а вторым входом - с выходом усилителя напряжения и вторым входом блока переключения, подключенного третьим входом к вькоду блока задания программ, четвертыми входами - к соответствукщим выходам блока выделения разрядов, а выходом к входу блока управления, связанного меха нически с датчиком скорости привода. На чертеже изображена структурная схема системы. Система содержит блок 1 задания программ, сумматор 2, элемент ИЛИ 3, блок 4 выделения разряда, преобразователь 5 код-напряжение, усилитель 6 напряжения, блок 7 переключения, схема 8 сравнения, блок 9 управления, датчик 1О перемещения, датчик 11 скорости привода. Система работает следующим образом. Блок 1 задания программы выдает заданные величины перемещения на второй вход сумматора 2 и скорости привод на блок 7 переключения на третий вход. Заданная величина скорости поступает в блок 7 переключения, который передает его в блок 9 -управления. Блок 9 управления воздействует на датчики 10 и 11 Импульсы с датчика 10 перемещения поступают на первый вход сумматора 2. Сумматор 2 формирует код разности заданного и текущего положения привода при этом ГМ младщих разрядрв кода разности, которые соответствуют схемно заложенной зоне торможения, поступают в блок 4 выделения разр5ща, а Н стар-
ших -разрядов в элемент ИЛИ 3. С выхода элемента ИЛИ 3 в блок 4 выделешия разряда поступает запрещакяций сигнал. При достижении приводом зоны торможения запрещающий сигнал, соответствующий обнулению старщих разрядов снимается и блок 4 выделения разрядов разрещает прохождение Л1 младших разрядов в преобразователь 5 код-напряжение. По ,w младших разрядов преобразователь 5 код-напряжение формирует напряжение, соответствующее зоне торможения, которое через усилитель 6 поступает в блок 7 переключения и в схему 8 сравнения как сигнал скорости программного торможения. В схеме 8 сравнения сравнивается текущее значение скорости привода, поступающей от датчика 11 скорости с Величиной скорости программного торможения. При равенстве сигналов схема 8 сравнения выдает импульс в бцок 7 переключения, что приводит к переключению бпока 7. Блок 9 управления переходит на режим программного торможения по сигналу, поступающему из усилителя 6 через блок 7 переключения. При совпадении кодов текущего и заданного значений код разности становится равным нулю, напряжение на входе блока 9 управления равно нулю, что соответствует остановке привода в заданной точке. С выхода блока 4 вьщеления разрядов, находящихся в нулевом состоянии, в блок 7 переключения поступает сигнал, переключающий его в первоначальное положение. Использование новых элементов датчика скорости, схемы сравнения скоростей, блока переключения, обеспечивает автоматическое регулирование величины тормозного пути в функции от величины скорости привода, что о славливает повышение точности и бьютродействие системы и расширение области применения систем, например, в станкостроении, радиолокации и т.п. Формула изобретения Цифровая система программного управления с адаптивным позиционированием привода, содержшдая включенные последовательно блок управления, датчик перемещения и сумматор, соединенный вторым входом с выходом блока задания программ , а выходами старших разрядов - с входами элемента ИЛИ, подключенного выходом к первому входу блока
