ел
о ;о
сд
сх
Изобретение относится к автоматизации процессов обработки металлов давлением и может быть использовано для подачи листового материала в рабочую зону пресса координатной штамповки.
Цель изобретения - расширение технологических возможностей путем обеспечения подачи заготовок, установленных вертикально под углом 90° к оси подачи, в зону обработки.
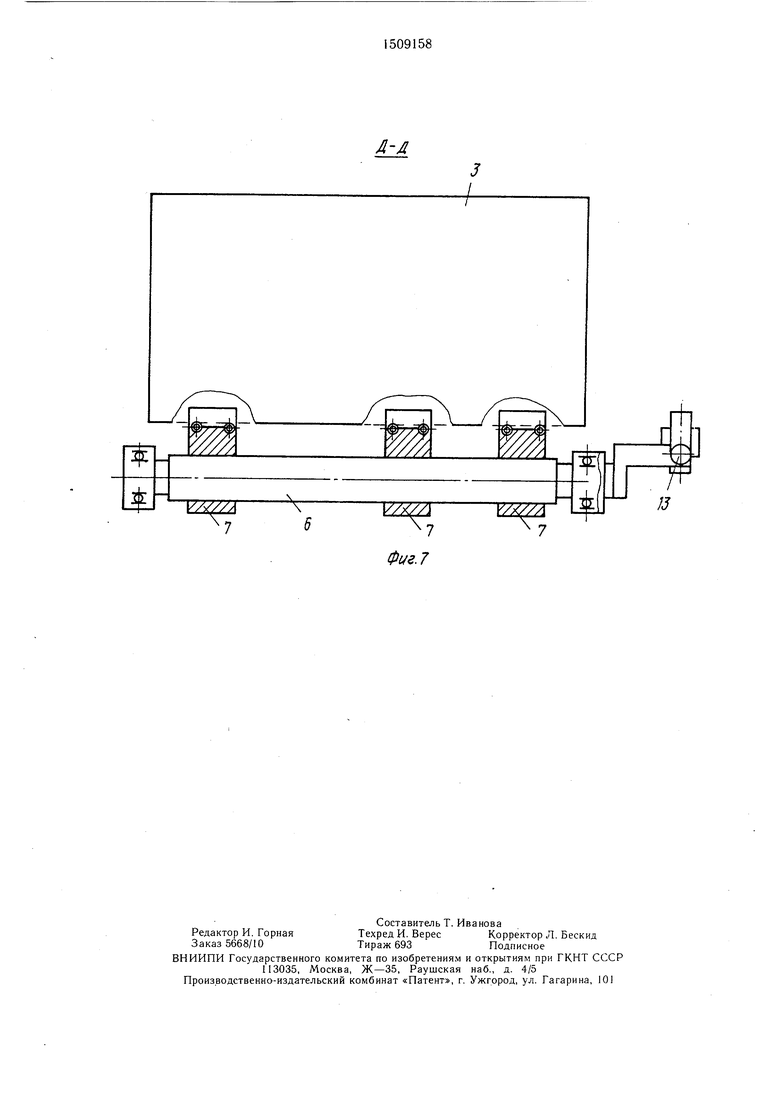
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - вид Г на фиг. 2; на фиг. 7 - разрез Д-Д на фиг. 2.
Устройство содержит основание 1, на котором смонтирован механизм 2 манипулирования для перемещения заготовок 3, состоящий из каретки 4, на которой установлен привод 5 поворота, позволяющий повора- чивать траверсу 6 с удерживающими захватами 7 на угол 90°, при этом каретка 4 установлена на каретке 8 с возможностью возвратно-поступательного движения по направляюш.ей 9 перпендикулярно оси подачи заготовок 3 в зону обработки. Каретка 8 установлена на основании 1 с возможностью возвратно-поступательного движения вдоль оси подачи по направляющей 10.
Заготовки 3 подаются в кассете II вертикально и под углом 90° к оси подачи. Кассета 11 установлена на приемном столе 12 с возможностью качения в плоскости расположения заготовок 3 и шагового перемещения.
На траверсе- 6 со смещением в сторону кассеты 11 установлен дополнительный тянущий захват 13, который служит для извлечения заготовок 3 из кассеты 11. На оси 14 установлена также направляющая стойка 15 с пазом 16, в котором смонтированы дополнительные удерживающие захваты 17 и датчик 18. В паз 16 заходит крон- щтейн 19, установленный на траверсе 6, посредством которого стойка 15 поворачивается на 90°. На траверсе 6 установлены датчики 20 и 21, реагирующие на кромку коротких и длинных листов соответственно.
Для предотвращения самопроизвольного поворота траверсы 6 на основании 1 установлен фиксатор 22. Кассета 11 имеет прорези, в которые заходят ролики 23.
Устройство работает следующим образом.
Кассета 11 с вертикально установленными заготовками 3 устанавливается на приемный стол 12 с шаговой подачей. Каретка 4 перемещается вправо по направляющей 9 (ось X) до тех пор, пока дополнительный тянущий захват 13 не окажется под передней частью нижней кромки заготовки 3. Далее захват 13 закрывается и механизм 2 манипулирования перемещается влево до момента срабатывания датчика 18 от задней заготовки 3, находящейся в пазу 16 направляющей стойки 15. Если каретка 4 переместилась влево на весь свой ход, а датчик 18 не сработал (что имеет место при большой длине заготовки 3, то включаются дополнительные захваты 17, а захват 13 раскрывается и механизм 2 манипулирования начинает перемещаться вправо до момента срабатывания датчика 21 от передней кромки заготовки 3. Губки захватов 7 находятся при этом в открытом состоянии. После остановки движения механизма 2 манипулирования губки захватов 7 смыкаются, захватывая заготовку, удерживающие захваты 17 открываются и механизм 2 манипулирования начинает двигаться влево, вытаскивая оставшуюся часть заготовки 3 из кассеты 1 до срабатывания датчика 18 от задней кромки листа. Далее срабатывают дополнительные удерживающие захваты 17, захваты 7 разжимаются и механизм 2 манипулирования перемещается вправо до расположения крайних захватов 7 симметрично относительно передней и крайней кромки листа, что определяется программным устройством управления механизма 2 манипулирования. Захваты 7 срабатывают, фиксатор 22 отходит и траверса 6 с закрепленными на ней удерживающими захватами 7 под воздействием привода 5 поворота поворачивается на 90°, переводя лист из вертикального в горизонтальное положение. Правая часть листа опирается при этом на направляющую стойку 15. В горизонтальном положении механизм 2 манипулирования перемещает заготовку 3 посредством каретки 8 до взаимодействия передней кромки заготовки с датчиком установки ее в исходное положение (по оси У).
Если при первом перемещении заготовки 3 влево срабатывает датчик 18, что свидетельствует о малой длине заготовки, то движение механизма 2 манипулирования прекращается, захваты 7 открываются и каретка 4 перемещается вправо до срабатывания датчика 20. При этом правые два захвата 7 устанавливаются посередине заготовки 3 и далее перевод последней и ее подача для дальнейшей обработки производятся описанным способом.
Формула изобретения
Устройство для отделения листа от стопы и подачи его для дальнейшей обработки, содержащее смонтированные на основании приемный стол с кассетой для стопы заготовок, механизм манипулирования, выполненный в виде поворотной траверсы с удерживающими захватами и каретки,и средство для подачи заготовок в зону обработки, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения подачи заготовок, установленных вертикально под углом 90° к оси подачи, в зону обработки, оно снабжено дополнительным тянущим захватом, установленным на траверсе, а также установленной на траверсе между тянущим и удерживающими захватами направляющей стойкой с открытым пазом для прохода заготовок, в котором смонтированы дополнительные удерживающие захваты и датчик положения заготовок, при этом каретка механизма кантования выполнена с возможностью возвратно-поступательного движения перпендикулярно оси подачи, а средство для подачи заготовок в зону обработки выполнено в виде каретки, установленной на основании с возможностью возвратно-поступательного движения вдоль оси подачи заготовок в зону обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки листовых заготовок | 1979 |
|
SU919759A1 |
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для подачи листа в зону обработки | 1985 |
|
SU1357108A1 |
| Установка для подачи листов к ножницам | 1982 |
|
SU1031717A2 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в зону захвата | 1988 |
|
SU1680417A1 |
| Устройство для отделения листа от стопы и подачи его в зону обработки | 1985 |
|
SU1263407A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |


Изобретение относится к автоматизации процессов обработки металлов давлением и может быть использовано для подачи листового материала в рабочую зону пресса координатной штамповки. Цель изобретения - расширение технологических возможностей путем обеспечения подачи заготовок, установленных вертикально под углом 90° к оси подачи. Устройство содержит установленную на основании 1 каретку 8, которая перемещается по направляющей 10 вдоль оси подачи заготовки 3 в зону обработки. На каретке 8 установлен механизм манипулирования, состоящий из каретки 4 и траверсы 6 с приводом поворота, смонтированных на каретке 4. На траверсе 6 смонтированы удерживающие захваты 7, кронштейн 19, дополнительный тянущий захват 13 и датчики 20 и 21. Датчики 20 и 21 реагируют на кромку коротких и длинных листов соответственно. На оси установлена направляющая стойка 15. В пазу, выполненном в стойке 15, установлены дополнительные удерживающие захваты и датчик. В паз стойки 15 заходит кронштейн 19 для поворота ее 90° вместе с траверсой 6. Устройство позволяет расширить диапазон подаваемых заготовок и обеспечить базировку по краям. 7 ил.
2/
5 б
/2
Фие. 1
фие.З
Б-Б
Фие.
Фае. 5
:.
ВидГ
18Фие.6
/J
Фиг. 7
| Устройство для отделения листа от стопы и подачи его для дальнейшей обработки | 1985 |
|
SU1294429A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
