сд
со
со
22 S
стью пластины при его холостом ходе. При рабочем ходе штанги толкатели отжимают через короткое плечо рычаг 7, и,перемещая груз, проходят в пазах 16 стола 6. После прохождения толкателей рьмаг 7 под действием пружины 19 возвращается в исходное положение и перекрывает паз 16, При
холостом ходе штанги толкатели отжимаются и проходят под рычагом 7, не выступая из паза 16, что позволяет устанавливать на рабочий стол 6 устройства новый груз. Благодаря горизонтальному отводу рычагов 7 достигается уменьшение габарита устройства по высоте и длине. 6 ил.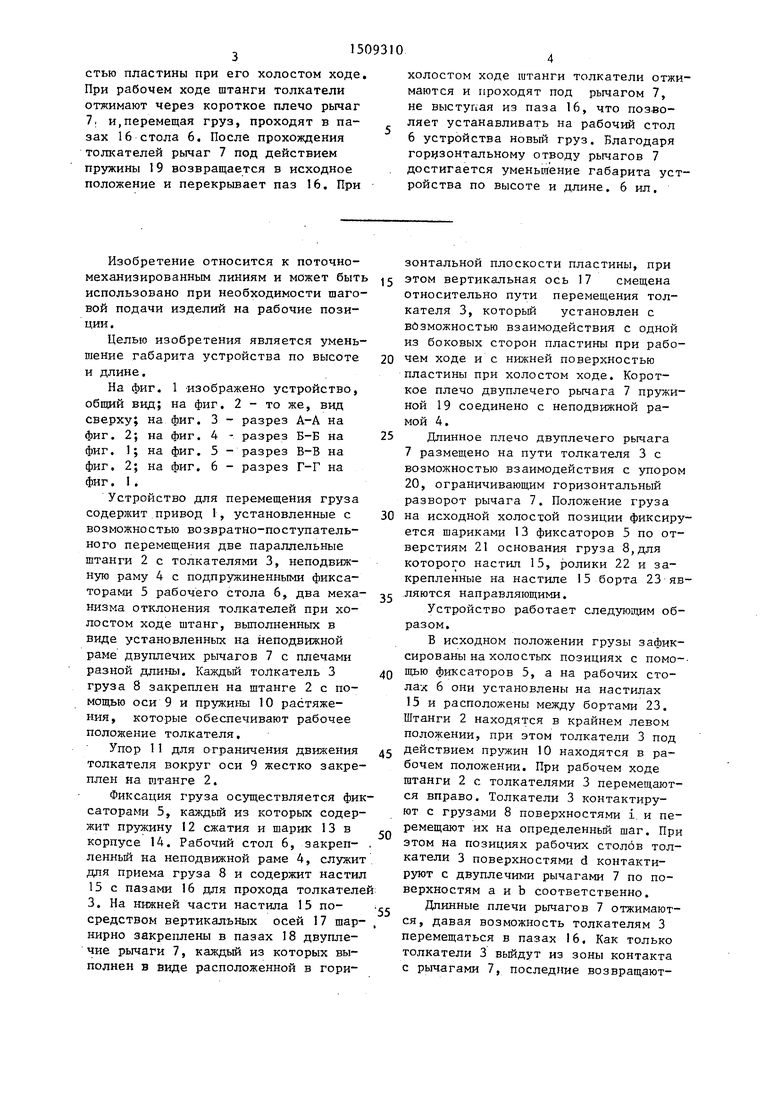
| название | год | авторы | номер документа |
|---|---|---|---|
| Штанговый конвейер | 1978 |
|
SU776959A1 |
| Многопозиционная машина для бесшвейного скрепления книжных блоков | 1989 |
|
SU1671474A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Кулачково-рычажный механизм подачи устройства для обработки деревянных заготовок | 1983 |
|
SU1167005A1 |
| Штанговый конвейер | 1986 |
|
SU1371948A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1987 |
|
RU2070296C1 |
| Устройство для шагового перемещения изделий | 1986 |
|
SU1447727A1 |
| Шаговый конвейер | 1980 |
|
SU935396A1 |
| Устройство для формирования настила ткани на закройном столе | 1985 |
|
SU1289782A1 |
Изобретение относится к промышленному транспорту и может быть использовано в поточно-механизированных линиях при необходимости шаговой подачи изделий на рабочие позиции. Целью изобретения является уменьшение габарита устройства по высоте и длине. Устройство содержит привод, установленную с возможностью возвратно-поступательного перемещения штангу с толкателями, направляющие для перемещения груза, рабочий стол 6 с пазами 16 для прохода толкателей и механизм отклонения толкателей при холостом ходе штанги. Последний выполнен в виде установленного на неподвижной раме через вертикальную ось двуплечего рычага 7 с плечами разной длины и закрепленного на неподвижной раме упора. Двуплечий рычаг 7 выполнен в виде расположенной в горизонтальной плоскости пластины, причем его длинное плечо расположено на пути перемещения толкателя с возможностью взаимодействия с упором, а вертикальная ось смещена относительно пути перемещения толкателя. Толкатель установлен с возможностью взаимодействия с одной из боковых сторон пластины при рабочем ходе толкателя и с нижней поверхностью пластины при его холостом ходе. При рабочем ходе штанги толкатели отжимают через короткое плечо рычаг 7 и, перемещая груз, проходят в пазах 16 стола 6. После прохождения толкателей рычаг 7 под действием пружины 19 возвращается в исходное положение и перекрывает паз 16. При холостом ходе штанги толкатели отжимаются и проходят под рычагом 7, не выступая из паза 16, что позволяет устанавливать на рабочий стол 6 устройства новый груз. Благодаря горизонтальному отводу рычагов 7 достигается уменьшение габарита устройства по высоте и длине. 6 ил.
Изобретение относится к поточно- механизированным линиям и может быть использовано при необходимости шаговой подачи изделий на рабочие позиции.
Целью изобретения является уменьшение габарита устройства по высоте и длине.
На фиг. 1 -изображено устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. I.
Устройство для перемещения груза содержит привод 1, установленные с возможностью возвратно-поступательного перемещения две параллельные штанги 2 с толкателями 3, неподвижную раму 4 с подпружиненными фиксаторами 5 рабочего стола 6, два меха- низма отклонения толкателей при холостом ходе штанг, вьшолненных в виде установленных на неподвижной раме двуплечих рычагов 7 с плечами разной длины. Каждьй толкатель 3 груза 8 закреплен на щтанге 2 с помощью оси 9 и пружины 10 растяжения, которые обеспечивают рабочее положение толкателя.
Упор 11 для ограничения движения толкателя вокруг оси 9 жестко закреплен на штанге 2.
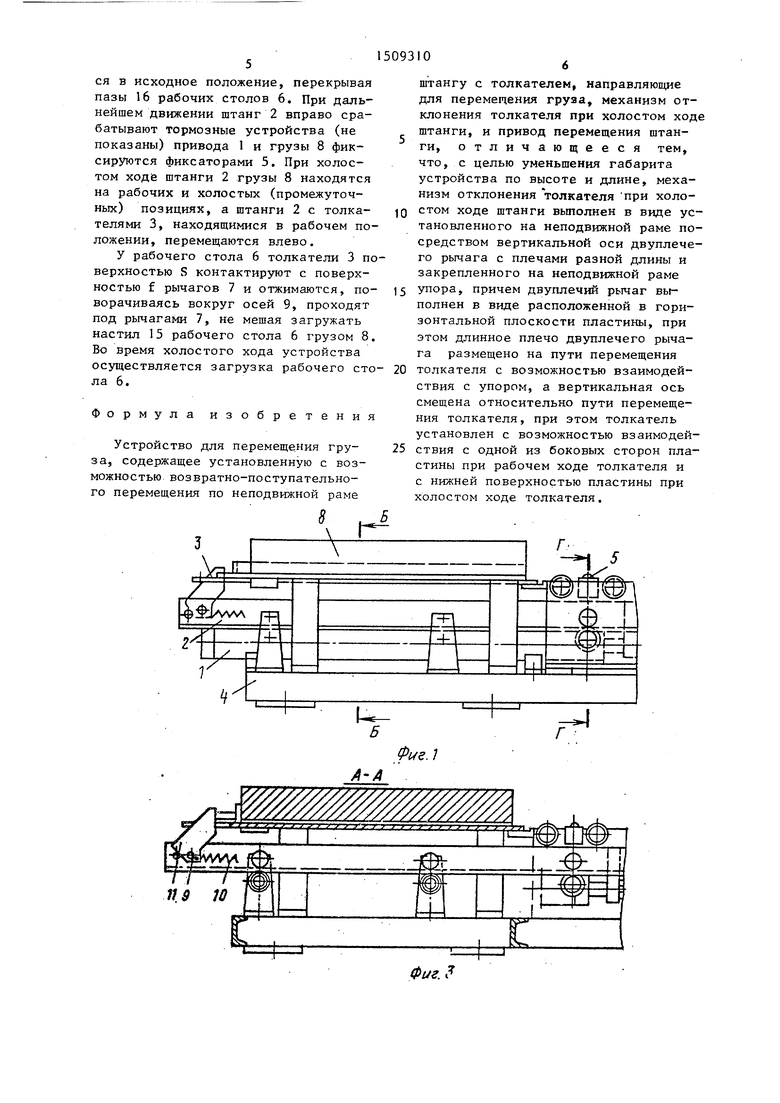
Фиксация груза осуществляется фиксаторами 5, каждый из которых содержит пружину 12 сжатия и шарик 13 в корпусе 14. Рабочий стол 6, закреп- ленньй на неподвижной раме 4, служит дня приема груза 8 и содержит настил 15 с пазами 16 для прохода толкателе 3. На нижней части настила 15 посредством вертикальных осей 17 шар- нирно закреплены в пазах 18 двуплечие рычаги 7, каждьй из которых выполнен в виде расположенной в гори
5
0
5
0 5 0
з
5
зонтальной плоскости пластины, при этом вертикальная ось 17 смещена относительно пути перемещения толкателя 3, который установлен с возможностью взаимодействия с одной из боковых сторон пластины при рабочем ходе и с нижней поверхностью пластины при холостом ходе. Короткое плечо двуплечего рычага 7 пружиной 19 соединено с неподвижной рамой 4.
Длинное плечо двуплечего рычага 7 размещено на пути толкателя 3 с возможностью взаимодействия с упором 20, ограничивающим горизонтальный разворот рычага 7. Положение груза на исходной холостой позиции фиксируется шариками 13 фиксаторов 5 по отверстиям 21 основания груза 8,для которого настил 15, ролики 22 и закрепленные на настиле 15 борта 23 являются направляющими.
Устройство работает следующим образом.
В исходном положении грузы зафиксированы на холостых позициях с ПОМО-- щью фиксаторов 5, а на рабочих столах 6 они установлены на настилах 15 и расположены между бортами 23. Штанги 2 находятся в крайнем левом положении, при этом толкатели 3 под действием пружин 10 находятся в рабочем положении. При рабочем ходе штанги 2 с толкателями 3 перемещаются вправо. Толкатели 3 контактируют с грузами 8 поверхностями i. и перемещают их на определенный шаг. При этом на позициях рабочих столов толкатели 3 поверхностями d контактируют с двуплечими рычагами 7 по поверхностям а и b соответственно.
Дпинные плечи рычагов 7 отжимаются, давая возможность толкателям 3 перемещаться в пазах 16. Как только толкатели 3 вьйдут из зоны контакта с рычагами 7, последние возвращаются в исходное положение, перекрывая пазы 16 рабочих столов 6. При дальнейшем движении штанг 2 вправо срабатывают тормозные устройства (не показаны) привода 1 и грузы 8 фиксируются фиксаторами 5. При холостом ходе штанги 2 грузы 8 находятся на рабочих и холостых (промежуточных) позициях, а штанги 2 с толкателями 3, находящимися в рабочем положении, перемещаются влево.
У рабочего стола 6 толкатели 3 по верхностью S контактируют с поверхностью f рычагов 7 и отжимаются, поворачиваясь вокруг осей 9, проходят под рычагами 7, не мешая загружать настил 15 рабочего стола 6 грузом 8. Во время холостого хода устройства осуществляется загрузка рабочего сто ла 6.
Формула изобретения
Устройство для перемещения груза, содержащее установленную с возможностью возвратно-поступательного перемещения по неподвижной раме
штангу с толкателем, направляющие для переметения груза, механизм отклонения толкателя при холостом ходе штанги, и привод перемещения штанги, отличающееся тем, что, с целью уменьшения габарита устройства по высоте и длине, механизм отклонения толкателя при холо Q стом ходе штанги выполнен в виде установленного на неподвижной раме посредством вертикальной оси двуплечего рычага с плечами разной длины и закрепленного на неподвижной раме
)5 упора, причем двуплечий рычаг выполнен в виде расположенной в горизонтальной плоскости пластины, при этом длинное плечо двуплечего рычага размещено на пути перемещения 20 толкателя с возможностью взаимодействия с упором, а вертикальная ось смещена относительно пути перемещения толкателя, при этом толкатель установлен с возможностью взаимодей25 ствия с одной из боковых сторон пластины при рабочем ходе толкателя и с нижней поверхностью пластины при холостом ходе толкателя.
Г
Фиг.
| Штанговый конвейер | 1978 |
|
SU776959A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
