Изобретение относится к конструкции захватных устройств для отделения и поштучного переноса листов и подобных плоских заготовок от стопы (пакета), а именно к вакуумным захватам.
Цель изобретения - повышение надежности работы захвата.
На фиг.1 представлен предлагаемый захват, общий вид с частичным разрезом по его оси; на фиг.2 - то же, вид сверху; на фиг.З - то же, в момент отрыва листа от стопы.
Вакуумный захват состоит из сильфона 1 с гофрами 2, размещенными на цилиндрической поверхности упругого опорного элемента 3 для контактирования с присасываемой деталью 4, жестко связанного с сильфо- пом, а также установленной в нем упорной пяты 5. Сильфом 1 выполнен в виде усеченного плоскостью, параллельной его продольной оси, цилиндра, гофры 2 которого расположены параллельно его продольной оси, а опорный элемент 3 выполнен в виде рамки. Вакуумный захват подводят, например, с помощью руки манипулятора или робота к стопе листов 6 так, чтобы рамка 3 легла на поверхность верхнего листа 4.
При включении вакуума в полости, ограниченной листом 4 и сильфоном 1, начинает создаваться разрежение, и разница давлений с обеих сторон листа 4 обеспечи
5
0
5
вает плотный прижим последнего к рамке 3. По мере увеличения вакуума происходит сжатие гофров 2 сильфона 1 в направлении к оси пяты 5, что приводит к загибанию противоположных краев листа 4 через эластичную пяту 5 (которая в это время упруго деформируется от середины к краям) и отрыву листа 4 от стопы 6. Затем рука манипулятора переносит захват в.месте с листом к месту обработки или сборки, после чего захват отпускает лист (при отключении вакуума), рука с захватом возвращается к стопе за следующим листом, и цикл повторяется.
Поскольку предлагаемый вакуумный захват имеет простую конструкцию и не требует для отделения одной нлоской заготовки от другой применения механических отсе- кателей или магнитных распушителей пакета, затрудняющих переналадку оборудования с одного типа заготовки на другой, его особенно выгодно использовать в роботизированных комплексах для мелкосерийного производства, где такая переналадка часто имеет место.
Применение предлагаемого захвата, обес- печивающ.его высокую надежность работы, эффективно для плоских заготовок, толщина которых значительно меньше их п.ющади и где особенно затруднено их поштучное отделение.
( оставите.. Е. .Xi-aHH
Редактор Е. Па 1 1Техред . ВересКорректор И.
Заказ 2976/18Тираж 590 1од| иеное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж 35, наб., д. 4/5
Филиал ПГШ «Патент, г. Ужгород, ул. Проектная, 4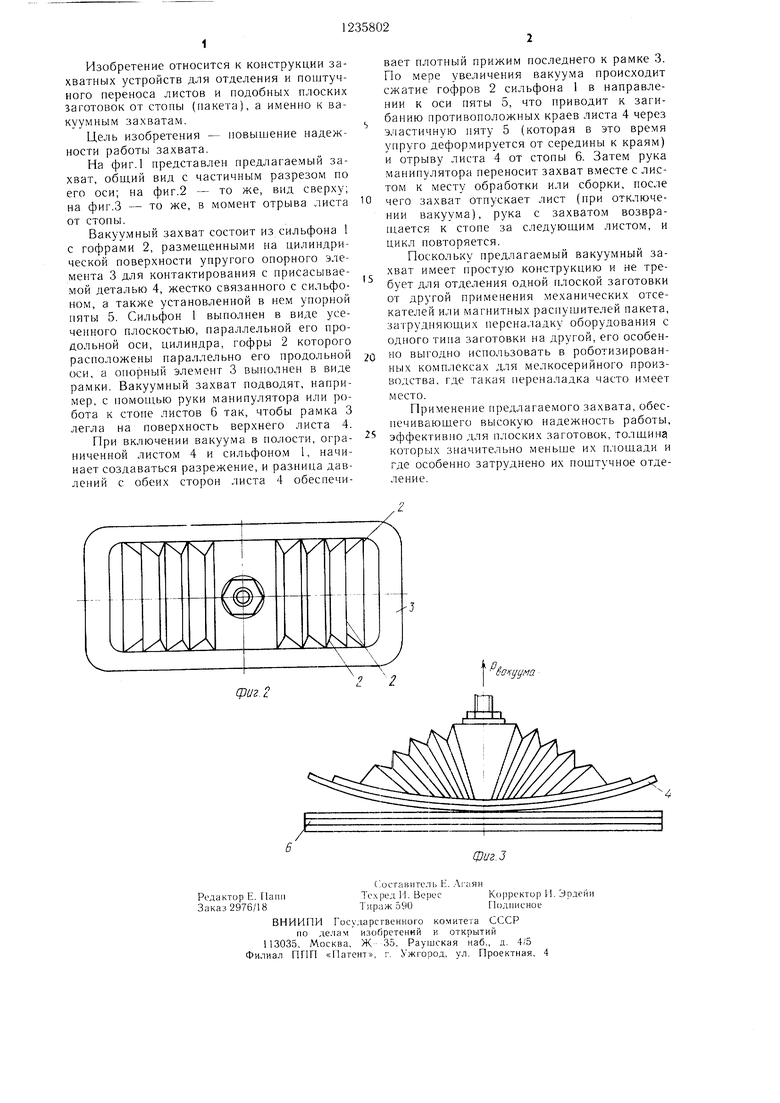
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1988 |
|
SU1509319A2 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Устройство для отделения листовых заготовок от стопы и подачи к обрабатывающей машине | 1983 |
|
SU1162532A1 |
| Устройство для поштучной выдачи листов из стопы | 1988 |
|
SU1595770A1 |
| Устройство для поштучного отделения верхнего листа от стопы | 1986 |
|
SU1382548A1 |
| МАНИПУЛЯТОР С ВАКУУМНЫМ ЗАХВАТОМ | 1995 |
|
RU2099176C1 |
| Устройство для изготовления пакетов керамических конденсаторов | 1981 |
|
SU1003164A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для отделения верхнего листа от стопы | 1985 |
|
SU1291258A1 |

| КЕРАМИЧЕСКАЯ МАССА ДЛЯ ИЗГОТОВЛЕНИЯ СТЕНОВЫХ МАТЕРИАЛОВ | 2016 |
|
RU2633831C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
