Изобретение относится к машиностроению и может быть использовано для оценки качества различных типов манипуляторов.
Целью изобретения является повышение производительности и точности оценки качества манипуляторов путем обеспечения возможности непрерывного измерения положения схвата при определении траектории его перемещения.
На фиг.1 изображен стенд-тренажер с манипулятором, общий вид; на фиг.2 - блок измерения.
Стенд содержит основание 1, на котором установлен испытуемый манипулятор 2, устройство для определения положения схвата 3 манипулятора, включающее шар 4 из магни- топроводного материала, размещаемый в схвате 3 при определении его положения, и блоки 5 и 6 измерения, каждый из которых состоит из трех датчиков Холла 7, расположенных по трем взаимно перпендикулярным осям, и двух магнитов 8, установленных на пластине 9 из немагнитопровод- ного материала по обе стороны от датчиков 7, при этом блоки 5 измерения установлены на основании 1 с возможностью перемещения и служат для определения точности позиционирования схвата 3 в отдельных точках пространства, а блоки 6 измерения жестко связаны с основанием 1 и служат для определения положения манипулятора 2 на основании 1 перед его испытанием.
Кроме того, стенд содержит устройство для регистрации траектории перемещения схвата 3, выполненное в виде магнитного стержня 10, например, из феррита или самарий-кобальтовых магнитов, шарнирно связанного одним концом с основанием, и трех датчиков Холла (не показаны), расположенных по трем взаимно перпендикулярным осям, которые закрепляются в схвате 3 при
0
5
0
5
регистрации его отклонений от заданной траектории. Сигналы от датчиков через усилитель 11 поступают на пульт 12 управления.
Стенд-тренажер работает следующим образом.
После установки манипулятора 2 на основание (фиг.1) оператор производит подготовку стенда к работе. Для этого в схват
3манипулятора 2 закрепляется шар 4. Оператор последовательно вводит шар 4 со схва- том 3 в зону магнитов 8 блоков 6 измерения, по сигналам которых определяют точные координаты местоположения манипулятора 2 на основании 1.
После подготовки стенда к работе оператор устанавливает блоки 5 измерения в рабочей зоне манипулятора 2, потом вносит щар
4последовательно в магнитное поле блоков 5 измерения. Измерение точности позиционирования производится при многократном автоматическом воспроизведении манипулятором 2 перемещений, задаваемых с пульта управления.
Различие в уровнях сигналов датчиков 7 при каждом цикле позиционирования в зоне магнитов 8 пропорционально ошибке позиционирования манипулятора 2 и фиксируется пультом 12 управления.
При регистрации точности воспроизведения заданной траектории оператор в схвате 3 устанавливает три датчика Холла устройства для регистрации траектории перемещения схвата, расположенные по трем взаимно перпендикулярным осям. Затем многократно воспроизводится прямолинейная траектория движения схвата 3 вдоль магнитного стержня 10 между двумя выбранными на нем точками. Различие в уровнях сигналов датчиков при каждом цикле воспроизведения траектории пропорционально отклонению движения схвата 3 от прямолинейного и фиксируется пультом 12 управления.
фиг. 2
Составитель Ф. Майоров
Редактор Л. ВеселовскаяТехред И. ВересКорректор О. Луговая
Заказ 3437/11Тираж 1051Подписное
ВНИИПИ Государственного комитета СССР
по де.пам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4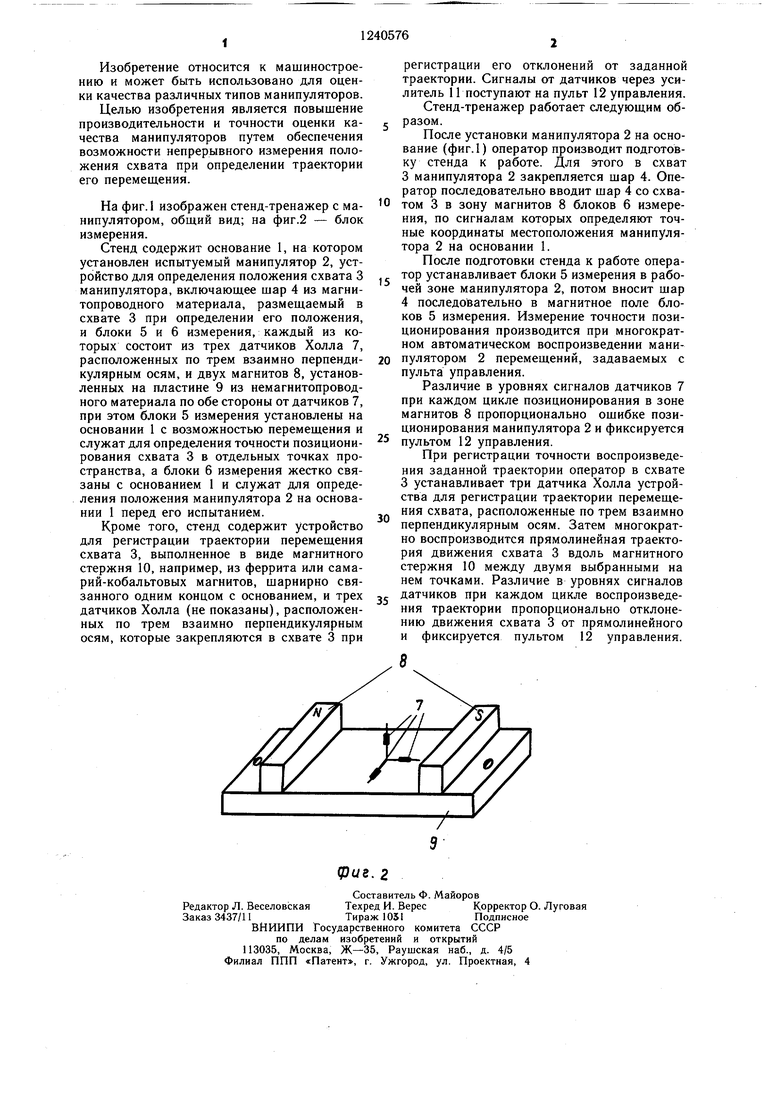
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Стенд для испытаний манипуляторов | 1983 |
|
SU1135638A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| ШАРИКОВЫЙ ВИСКОЗИМЕТР ДЛЯ МОЛОКА | 2021 |
|
RU2769878C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |

| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
