1
Изобретение относятся к машикостронию и может быть использовано для оценки качества разлнмньк типов ма1Ш пуляторов.
Известен етенд для оценки качества маннпуляторных систем, содержащий пульт управления и устройство задания траектории перемещения охвата манипулятора, содержащее телескопические штанги с информационными блоками, включающими элемекты индикации и датчики положетй f 1 j „
Недостатком этого устройства является отсутствие контроля угловой орнентация охвата, что существенно снижает его функщюнальные возможности.
Цель изобретения - расширение функциональных возможностей стенда.
Это достигается тем, что каждый информационный блок выполнен в виде головки, с расположенным на ней эле ментом индикаций, к которой посредст вом двух шарниров с взаимно перпендикулярными осями присоединен датчрпс
положекйЯг причем оба щарннра снабжены средстБа ч{и фтссаыии, а датчик пОложенйЯ ЪыпЬпйё1Г вШёpai epHj тьтх на 180 сдвоенных конневых переключателей..
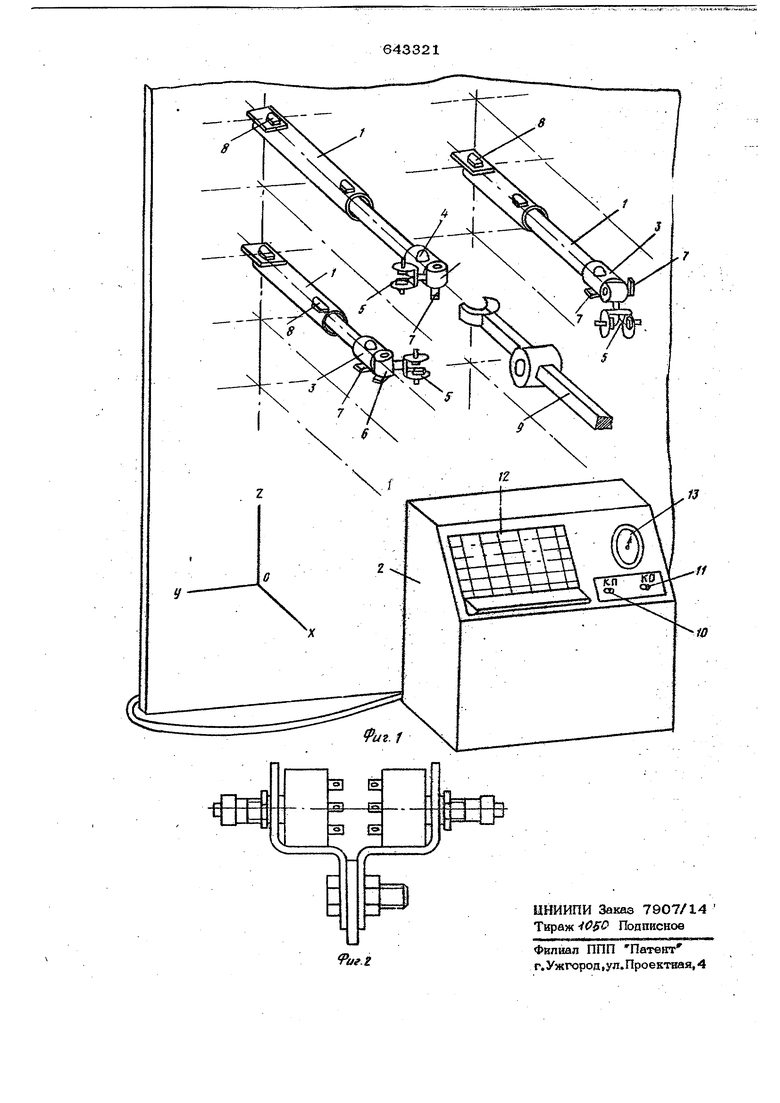
На фиг. 1 изображен предлагаемый стенд, общий вид на фиг. 2 - датчик положения ,
Стекд СОСТО5ГГ из телёскопическюс штанг 1 и пульта 2 управления. На конце каждой штанги расположена головка 3 информацио шогЬ блока, на которой размещен элемент 4 ивдикацни например сигнальная лампоч:ка. С головкой связан датчик 5 положения, -выполненный Б виде развернутых на 18О сдзоенных конневых переключателей под каждую губку охвата Подобное расположение переключателей исключает включение датчика, наприм ер, от случайного касания его внешней сто тоной схвата и вьш окдает производить втслючение датчшса тфи захвате его обеими губками схвата. Датчик присоединен к штанге при помощи шарнира 6, а также второго шариира, свйзьгоакянего шар шф 6 с гоповкой 3 (на фиг. 1 не показан). Оси указанных двух шарниров взаимно перпенйажулярны. Они снабже ны средствами 7 фиксашш углов поворота составляющих их . Кроме того, на штангах размещены средства 8 фиксации относительного располйжения их частей. Манипулятор 9 работает совместно с пультом 2 управлешш.Пупьт 2 имеет кнопку 10 включения стенда и кнопку 11 отключения, коммутаиионную панель 12 и электросекундомер 13, При подготовке стенда к работе . вначале выбираются координаты точек нространствениой траектории в проекшш на плоскость О, т. е выбираются соответствукядие тенескопяческие штанги 1, Затем для каждой яз выбранных i штанг задается, путем их выдвижения на требуемую величину, коорданата Х« В этом положении ®зеньа каждой щтанги 1 фиксируются при помовш средств 8. Неиспользуемые штанги 1 задвигаются. Далее производится ориентация датчиков 5 при помощи двух шарниров (один из них - шарнир 6) и фиксаций средствами 7. Производится комм тация гнезд панели 12 пульта управлеййя, соответствующих выбранным нггангам 1, а также устано а на ноль эл |росекундомера 13 стенда. Этан получения оценки качества сас темы начинается вк ючетием кнопки 1р пульта управления. После этогю на ЕОНйе каждой штанги, задающей траекторию, загораются элементы 4 индикации Одновременно включается электросекунд мер 13. Оператор обход рукой машшулятора заданной траёкто14рии от одной ее крайней топси к другой, последовательно включая схватом требуемые датчики положешш. При вклюении очередного датчика 5 гаснет соответствующий элемент 4 индикации. Это является для оператора сигналом о том, что можно переходить к очередному датчику, определяющему следую- . ую точку траектории. При обходе всех точек траектории все элементы индикации гаснут и электросекундомер останавливается. На нем зафиксирована величина, представляющая собой оценку ачества манипуляториой системы, изобретения ормула 1.Стенд-тренажер для оценки качества манипуляторных систем, содержащий пульт управле1юя и устройство задания траектории перемещения схвата манипулятора, содержащее телескопические щтанги с информационными блоками,, включающими индгасации и датчики положения, отличающийся тем, что, с пелью расщирения функциональных возможностей, каждый информационный блок выполнен в виде головки с расположеш ым на ней элементом нндшсании, к которой посредством двух шарниров с взаимно перпендикул5фными осями присоед1шен датчик положения, причем оба шарнира снабжены средствами фиксации 2.Стенд по п, 1, отличающий с я тем, что датчик положения в виде развернутых на ISO выполнен сдвоенных концевых переключателей. Источники; информации, принятые во тшимание при экспертизе; 1. Заявка № 2343651/25- 08 от ЗО,О1,77, по которой принято решение о выдаче авторского свидетельства.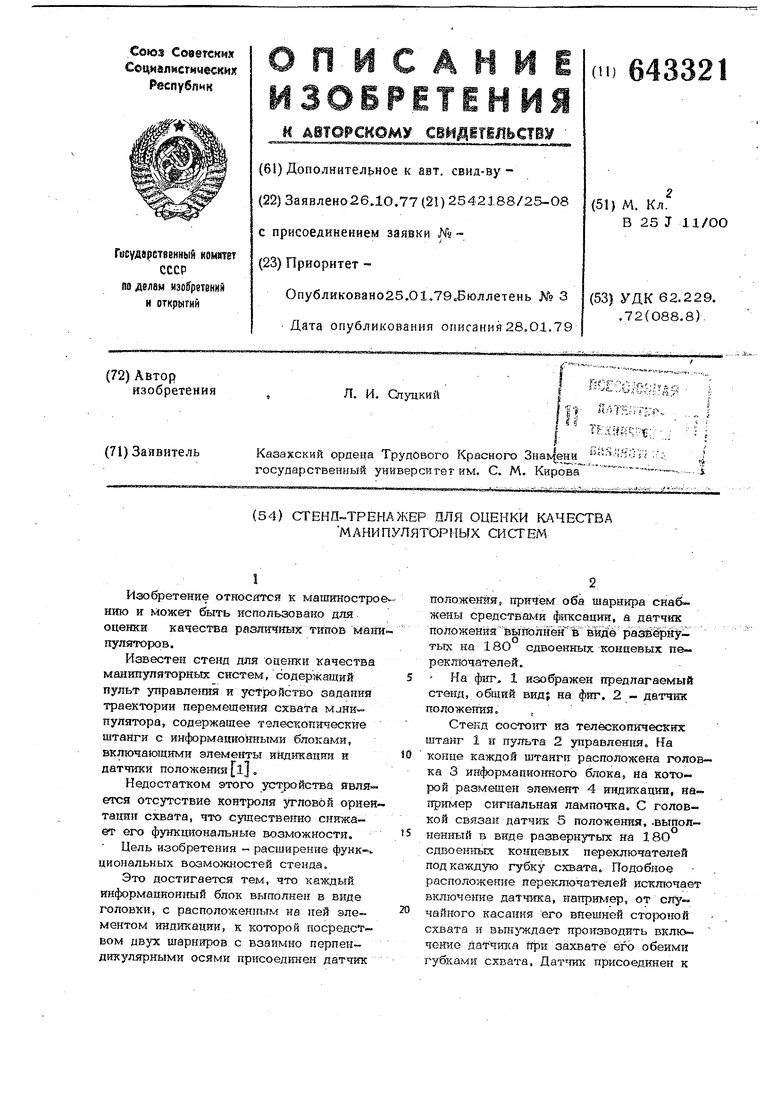
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для оценки качества манипуляторных систем | 1976 |
|
SU580113A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| Стенд для оценки качества манипуляторных систем | 1979 |
|
SU872252A1 |
| СТЕНД ДЛЯ ОЦЕНКИ .КАЧЕСТВА МАНИПУЛя'тВРБЫХ СИОТЕЯ"" | 1979 |
|
SU825313A2 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Стенд для испытания роботов | 1986 |
|
SU1335448A2 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| Стенд для испытания манипуляторов | 1987 |
|
SU1465307A1 |
| Стенд для испытания роботов-манипуляторов | 1984 |
|
SU1171308A1 |
| Стенд-тренажер для испытания манипуляторов | 1985 |
|
SU1240576A1 |