1
Изобретение относится к манипуляторам и может быть применено для оценки их качества.
Известны средства оценки эффективности манипуляторных систем с использованием аналоговых вычислительных машин 1.
Недостатком указанного средства является сложность задания траектории и определения координат схвата манипулятора.
Цель изобретения - автоматизация процесса оценки качества манипуляторных систем при прохождении схватом пространственной траектории.
Цель достигается за счет того, что устройство задания траектории представляет собой набор телескопических штанг со средствами фиксации относительного расположения их звеньев, на конце каждой из которых расположена система индикации и датчик, срабатывающий при приближении губок схвата.
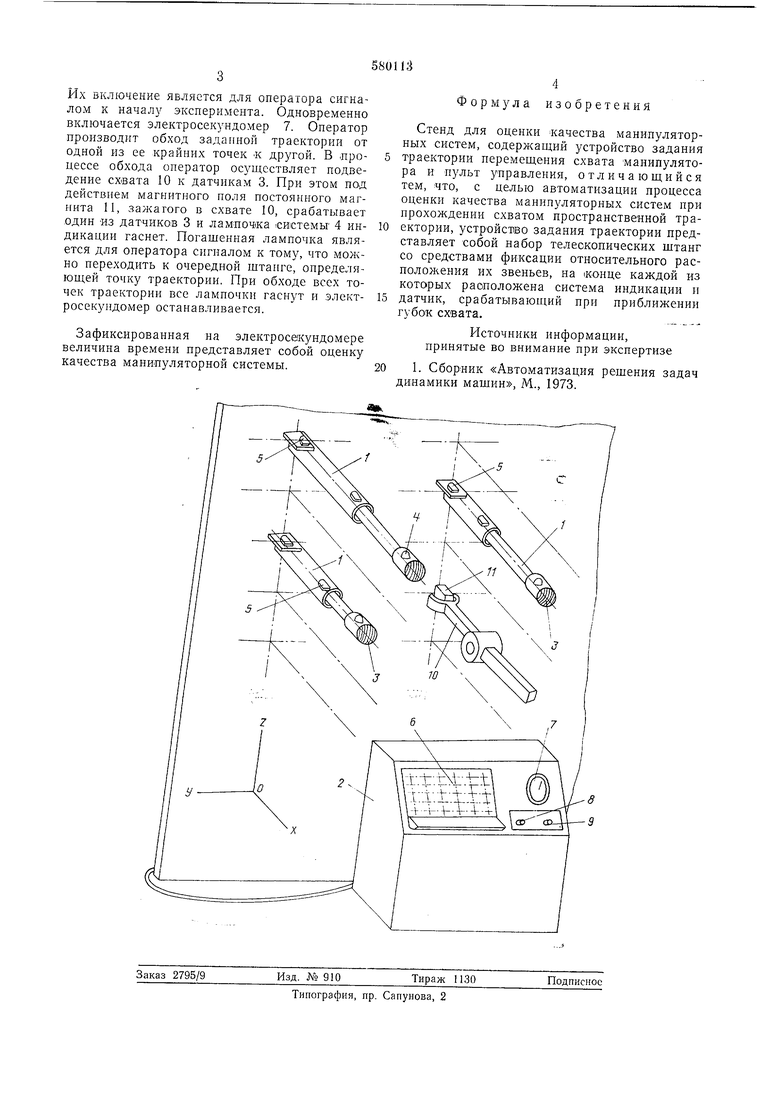
На чертеже изображен предлагаемый стенд.
Стенд содержит установленные на вертикальной стенке телескопические штанги 1 и пульт 2 управления. Каждая штанга содержит датчик 3, систему 4 индикации, например лампочку, средства 5 фиксации относительного расположения звеньев штанги 1. На пульт управления вынесена наборная штеккерная панель 6, электросекундомер 7, кнопка 8 запуска стенда и кнопка 9 его отключения. В губках схвата 10 зажат постоянный магнит 11.
Работа стенда происходит в два этапа, первым из которых является этап подготовки
стенда к процедуре получения оценки, а вторым - сам процесс получения оценки.
На первом этапе выбираются координаты точек пространственной траектории в проекции на плоскость YOZ, то есть выбираются
соответствуюш,ие телескопические штанги 1. Затем для каждой из штанг задается путем их выдвижения величина координаты X. В этом положении звенья каладой штанги фиксируются с помош,ью средств 5. Неиспользованные штанги задвигаются.
При испытаниях автоматического манипулятора координаты датчиков 3 на коицах штанг могут быть заданы оператору-программисту, а при исследовании копируюш,его манипулятора координаты этих датчиков определяются визуально. Этап подготовки стенда заканчивается подключением на панели G гнезд, соответствуюш,их выдвинутым штангам, а также установкой На «ноль электросекундомера 7.
При получении оценки системы, например «оператор-манипулятор, оператор включает кнопку 8 запуска стенда. После этого на конце каждой штанги, задаюшей траекторию,
загораются лампочки системы 4 индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Стенд для оценки качества манипуляторных систем | 1979 |
|
SU872252A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| СТЕНД ДЛЯ ОЦЕНКИ .КАЧЕСТВА МАНИПУЛя'тВРБЫХ СИОТЕЯ"" | 1979 |
|
SU825313A2 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Стенд для испытания манипуляторов | 1987 |
|
SU1465307A1 |
| Тренажер-имитатор бурового станка | 2019 |
|
RU2725451C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| Стенд для испытания роботов-манипуляторов | 1984 |
|
SU1171308A1 |
| Тренажер для подготовки операторов и оценки качества задания программы перемещений промышленных технологических роботов | 1991 |
|
SU1825728A1 |
