12
сл
ГС
ОС
сл
фигЛ
Изобретение относится к автоматизированным комплексам по переработке термореактивных материалов, в частности к роботизированным технологическим комплексам прессования изделий из таблетированных пресс-материалов.
Цель изобретения - расширение номенклатуры прессуемых изделий за счет изменения объема прессовой дозы высотой таблетки, либо количеством таблеток одного диаметра.
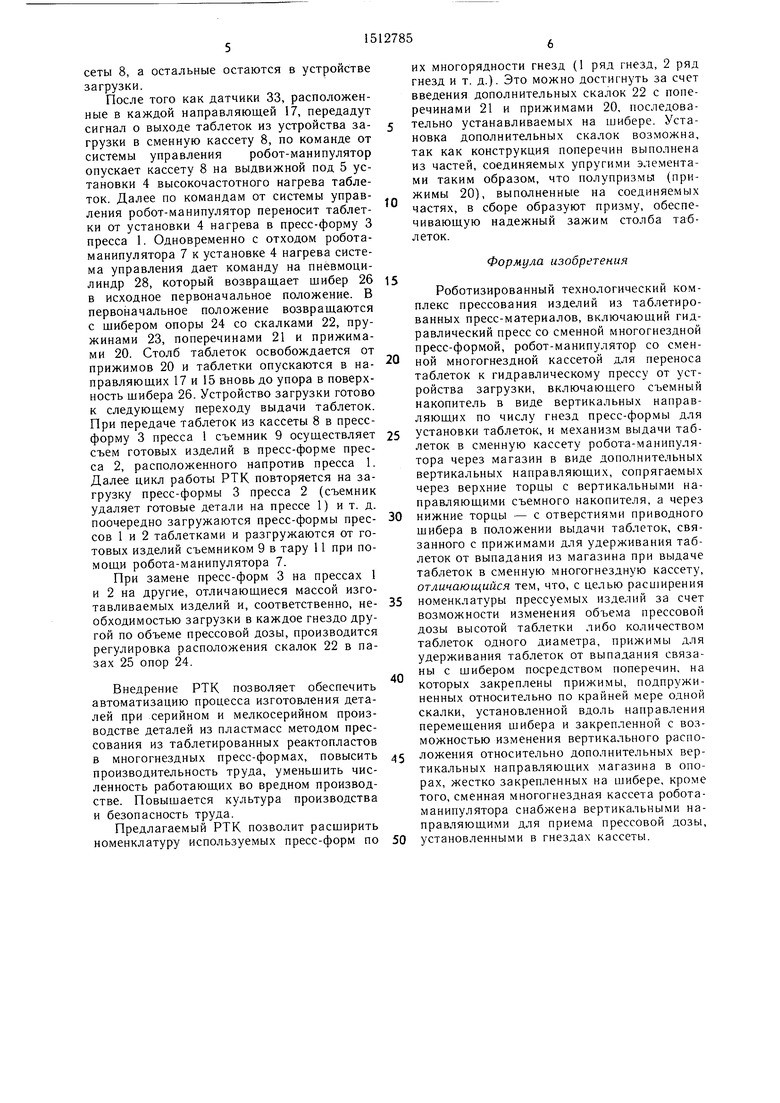
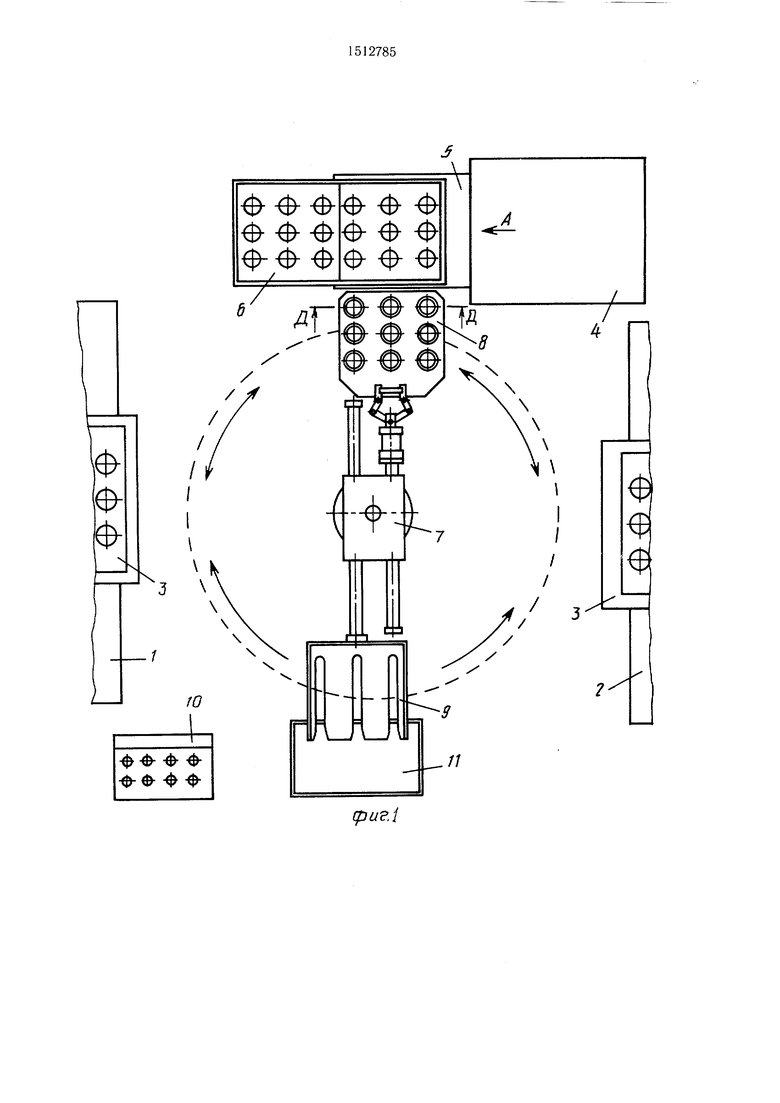
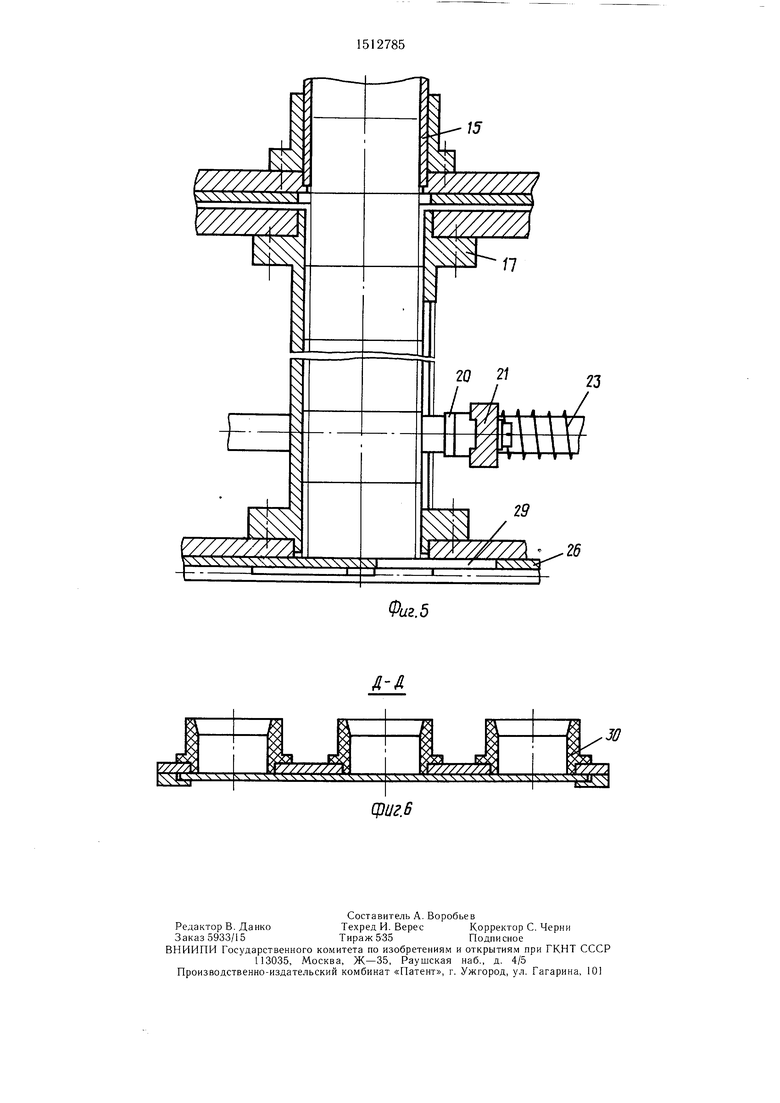
На фиг. 1 дана схема роботизированного технологического комплекса; на фиг. 2 - устройство загрузки таблеток в многогнезд- ную кассету, вид А на фиг. 1; на фиг. 3 - устройство загрузки таблеток, вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - положение таблеток в устройстве загрузки до начала выдачи; на фиг. 6 - разрез Д-Д на фиг. 1.
Роботизированный технологический комплекс (РТК) состоит из гидравлических прес сов 1 и 2 со сменными пресс-формами 3, установки 4 высокочастотного нагрева с выдвижным подом 5, устройства 6 загрузки, робота-манипулятора 7 с многогнездной сменной кассетой 8 и съемником 9, системы 10 управления РТК, приемной тары 11 для готовой продукции.
Устройство 6 загрузки таблеток в кассету 8 (фиг. 2-4) имеет основание 12, на котором крепится механизм 13 выдачи таблеток. На механизме 13 выдачи таблеток закреплен накопитель 14 с направляющими 15 в виде металлических труб. Металлических труб в накопителе столько, сколько гнезд в пресс-форме.
Механизм 13 выдачи таблеток состоит из магазина 16 в виде вертикальных направ- ляюндих 17 с пазами 18 и 19. Вертикальные направляющие 17 магазина являются как бы продолжением накопителя 14 и представляют собой металлические трубы, которые через торцы Е имеют возможность сопряжения их внутренней полости с внутренней полостью направляющих 15. В пазах 18 установлены датчики, регистрируюп1.ие выход таблетки из полости направляющих 17. В пазах 19 располагаются прижимы 20, которые закреплены на поперечинах 21. Поперечины 21 установлена на двух скалках 22 и подпружинены пружинами 23 относительно скалок. Скалки установлены в опорах 24 с пазами 25.
Пазы 25 предназначены для изменения расположения скалок 22 с поперечинами 21 по высоте. Опоры 24 жестко закреплены на щибере 26, входящем в состав механизма выдачи таблеток и который связан через рычаг 27 с пневмоцилиндром 28, установленным на основании 12. В шибере 26 выполнены отверстия 29, через которые таблетки выходят из магазина в вертикальные направляющие 30 для таблеток сменной многогнездной кассеты 8. Шибер 26 перемещается
в направлении, указанном стрелкой Г. Положение поперечин 21 может изменяться передвижением хомутов 31 по скалкам 22. Для того, чтобы повысить надежность удерживания таблеток от выпадания в среднем ряду направляющих 17, поперечина 21 выполнена из двух частей, соединенных плоской пружиной 32. Датчик, регистрирующий выход таблетки из полости направляющих 17, обозначен позицией 33. На основании 12 устанавливаются два накопителя 14 для увеличения времени бесперебойной работы комплекса. У снятого накопителя в нижней части устанавливается съемная заслонка 34, которая удаляется после установки накопителя
в рабочее положение.
РТК работает следующим образом. Вначале производится подготовительная работа. На гидравлических прессах 1 и 2 .. закрепляются необходимые для изготовления деталей многогнездные пресс-формы 3. На одной руке робота-манипулятора 7 закрепляется соответствующая установленной на пресс-форме многогнездная сменная кассета 8, а на другой руке закрепляется съем5 ник 9 для снятия готовых изделий с пресс- форм 3. Накопитель 14 заполняется таблетками заранее непосредственно у таблетирую- щей мащины, транспортируется и устанавливается на механизм выдачи таблеток. Заслонка 34 удаляется и таблетки опуска0 ются в направляющие 17 до упора в поверхность щибера 26 (фиг. 5). Скалки 23 устанавливаются по высоте расположения в зависимости от объема требующейся прессовой дозы за счет их переустановки в пазах 25 опор 24.
5 По команде от системы 10 управления РТК рука робота с кассетой выходит на позицию загрузки таблеток под механизм 13 выдачи таблеток. Вертикальные направляющие 30 многогнездной сменной кассеты 8
0 устанавливаются напротив вертикальных направляющих 17. Срабатывают датчики положения руки робота-манипулятора 7 и от системы 10 управления подается сигнал на работу пневмоцилиндра 28, который через рычаг 27 сдвигает щибер 26. При этом пере5 двигаются опоры 24 со скалками 22. Прижимы 20 входят в пазы 19 направляющих 17 и упираются в боковую поверхность таблетки, расположившейся напротив прижима в столбе таблеток, образованном из таблеток в направляющих 15 и 17. Шибер 26 продол0 жает свое движение до тех пор, пока его отверстия 29 не совместятся с полостями направляющих 17 механизма выдачи таблеток. При движении щибера до конечного своего положения перемещаются также поперечиг ны 21, сжимая пружины 23 и прижимы 20, в результате надежно зажимая столб таблеток в направляющих 15 и 17. Таблетки, находящиеся ниже зажатой прижи.мами 20, выпадают в направляющие 30 сменной кассеты 8, а остальные остаются в устройстве загрузки.
После того как датчики 33, расположенные в каждой направляющей 17, передадут сигнал о выходе таблеток из устройства за- грузки в сменную кассету 8, по команде от системы управления робот-манипулятор опускает кассету 8 на выдвижной под 5 установки 4 высокочастотного нагрева таблеток. Далее по командам от системы управления робот-манипулятор переносит таблетки от установки 4 нагрева в пресс-форму 3 пресса 1. Одновременно с отходом робота- манипулятора 7 к установке 4 нагрева система управления дает команду на пнёвмоци- линдр 28, который возвращает щибер 26 в исходное первоначальное положение. В первоначальное положение возвращаются с щибером опоры 24 со скалками 22, пружинами 23, поперечинами 21 и прижимами 20. Столб таблеток освобождается от прижимов 20 и таблетки опускаются в на- правляющих 17 и 15 вновь до упора в поверхность шибера 26. Устройство загрузки готово к следующему переходу выдачи таблеток. При передаче таблеток из кассеты 8 в пресс- форму 3 пресса 1 съемник 9 осуществляет съем готовых изделий в пресс-форме пресса 2, расположенного напротив пресса 1. Далее цикл работы РТК повторяется на загрузку пресс-формы 3 пресса 2 (съемник удаляет готовые детали на прессе 1) и т. д. поочередно загружаются пресс-формы прес- сов 1 и 2 таблетками и разгружаются от готовых изделий съемником 9 в тару 11 при помощи робота-манипулятора 7.
При замене пресс-форм 3 на прессах 1 и 2 на другие, отличающиеся массой изготавливаемых изделий и, соответственно, не- обходимостью загрузки в каждое гнездо другой по объеме прессовой дозы, производится регулировка расположения скалок 22 в пазах 25 опор 24.
Внедрение РТК позволяет обеспечить
автоматизацию процесса изготовления деталей при серийном и мелкосерийном производстве деталей из пластмасс методом прессования из таблетированных реактопластов в многогнездных пресс-формах, повысить производительность труда, уменьщить численность работающих во вредном производстве. Повышается культура производства и безопасность труда.
Предлагаемый РТК позволит расширить номенклатуру используемых пресс-форм по
их многорядности гнезд (1 ряд гнезд, 2 ряд гнезд и т. д.). Это можно достигнуть за счет введения дополнительных скалок 22 с поперечинами 21 и прижимами 20, последовательно устанавливаемых на шибере. Установка дополнительных скалок возможна, так как конструкция поперечин выполнена из частей, соединяемых упругими элементами таким образом, что полупризмы (прижимы 20), выполненные на соединяемых частях, в сборе образуют призму, обеспечивающую надежный зажим столба таблеток.
Формула изобретения
Роботизированный технологический комплекс прессования изделий из таблетированных пресс-материалов, включающий гидравлический пресс со сменной многогнездной пресс-формой, робот-манипулятор со сменной многогнездной кассетой для переноса таблеток к гидравлическому прессу от устройства загрузки, включающего съемный накопитель в виде вертикальных направляющих по числу гнезд пресс-формы для установки таблеток, и механизм выдачи таблеток в сменную кассету робота-манипулятора через магазин в виде дополнительных вертикальных направляющих, сопрягаемых через верхние торцы с вертикальными направляющими съемного накопителя, а через нижние торцы - с отверстиями приводного щибера в положении выдачи таблеток, связанного с прижимами для удерживания таблеток от выпадания из магазина при выдаче таблеток в сменную многогнездную кассету, отличающийся тем, что, с целью расширения номенклатуры прессуемых изделий за счет возможности изменения объема прессовой дозы высотой таблетки либо количеством таблеток одного диаметра, прижимы для удерживания таблеток от выпадания связаны с щибером посредством поперечин, на которых закреплены прижимы, подпружиненных относительно по крайней мере одной скалки, установленной вдоль направления перемещения щибера и закрепленной с возможностью изменения вертикального расположения относительно дополнительных вертикальных направляющих магазина в опорах, жестко закрепленных на щибере, кроме того, сменная многогнездная кассета робота- манипулятора снабжена вертикальными направляющими для приема прессовой дозы, установленными в гнездах кассеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Агрегат для загрузки пресс-форм прессматериалами при изготовлении пластмассовых деталей | 1961 |
|
SU145342A1 |
| Автоматический агрегат для изготовления изделий из термореактивных пресс-материалов | 1985 |
|
SU1525007A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ТАБЛЕТКАМИ ПРЕСС-МАТЕРИАЛА ПРЕСС-ФОРМ ПРЕССА | 1970 |
|
SU279029A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Автоматизированный технологический комплекс для изготовления изделий из пластмасс | 1983 |
|
SU1248835A1 |
| Загрузочное устройство | 1985 |
|
SU1310168A2 |
| Пластикатор-дозатор для полимерных материалов | 1985 |
|
SU1303428A1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕРЕВОМЕТАЛЛИЧЕСКИХ БАЛОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254229C2 |
Роботизированный технологический комплекс прессования изделий из таблетированных пресс-материалов относится к оборудованию по переработке термореактивных материалов. Цель изобретения - расширение номенклатуры прессуемых изделий за счет изменения объема прессовой дозы высотой таблетки, либо количеством таблеток одного диаметра. Для этого прижимы 20 для удерживания таблеток от выпадения связаны с шибером 26 посредством поперечин 21, на которых закреплены прижимы, подпружиненных относительно по крайней мере одной скалки 22, установленной вдоль направления перемещения шибера и закрепленной с возможностью изменения вертикального расположения относительно дополнительных вертикальных направляющих магазина в опорах 24, жестко закрепленных на шибере. Кроме этого, сменная многогнездовая кассета робота-манипулятора снабжена вертикальными направляющими для приема прессовой дозы, установленными в гнездах кассеты. 6 ил.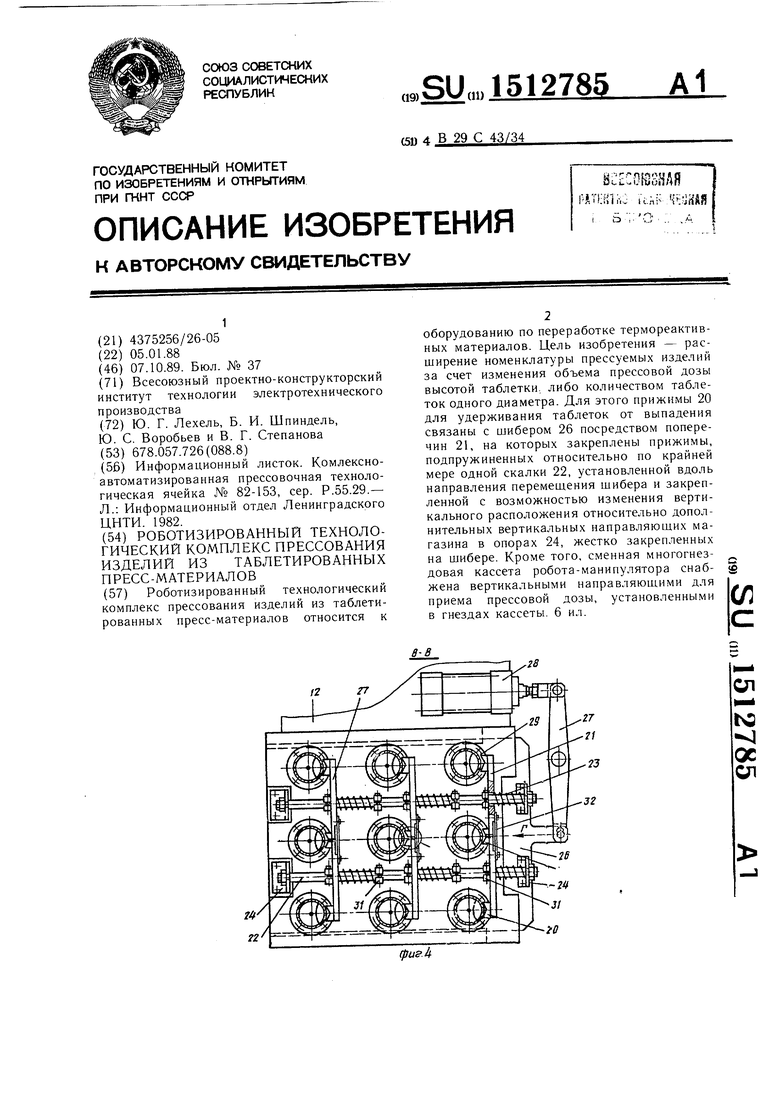
(риг
9/;5 / / 2 - 7В 27
5
/////
| Информационный листок | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
