сд
а
ел
Изобретение относится к обработке металлов давлением, в частности к уст- poiiciBaM для гибки труб, преимущественно в стесненных условиях на месте монтажа.
1Дель изобретения - расширение тех- но. югических возможностей путем обеспечения в условиях ограниченного пространства гибов в различных плоскостях.
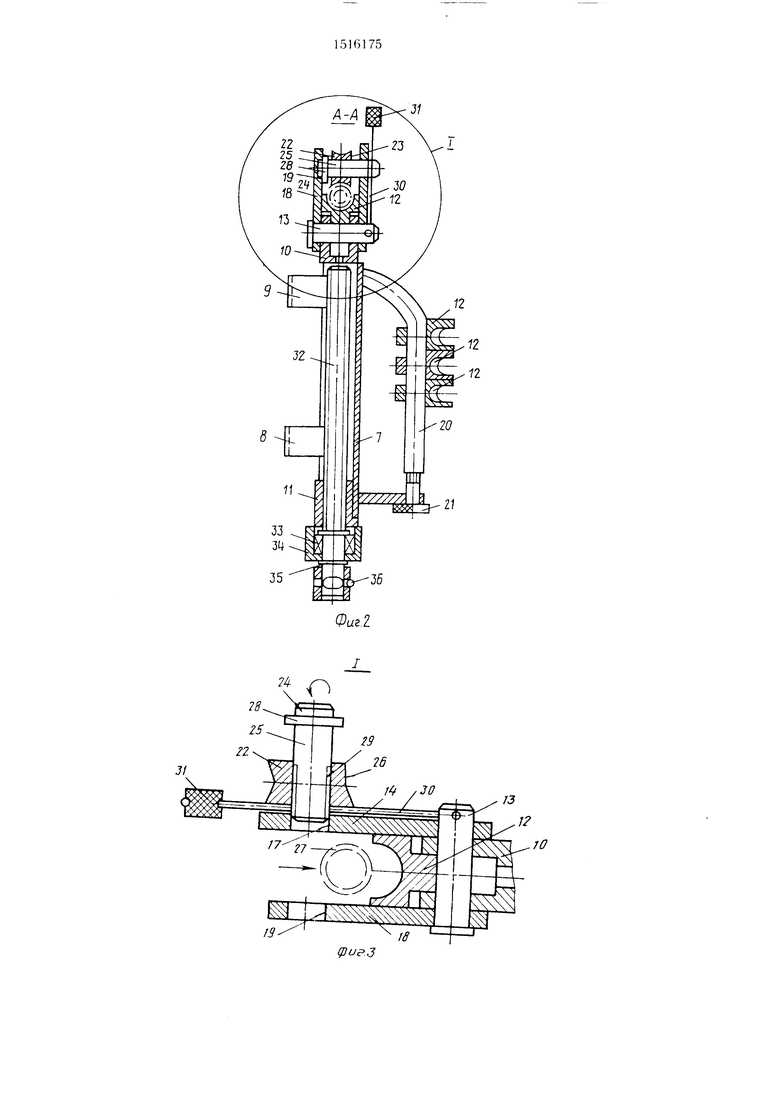
На фиг. 1 показано устройство, общий вид сверху; на фиг. 2 - разрез А -А на фиг. 1; на фиг. 3 - узел I на фиг. 2 (устройство в исходном положении для установки трубы или установки устройства на трубу); на фиг. 4 - то же, устройство в исходном положении перед началом гиба; на фиг. 5 - П1кала углов гибки груб на 1паб. 1опах.
Устройство для гибки труб содержит опору 1,11 1пар)1ирно закрепленные на ней Д 5у11лечие рычаги 2 и 3, связанные ре- ллируемыми тя1 ами 4 и 5 с силовым приводом поворота рычагов 6.
Onojja 1 представляет собой сварную конструкции) и содержит корпус 7 с при- иа|)Н1)1ми к)о |111тейна 1и 8 и 9 д.1я работы в стициопа1)11ых условиях, один торец кор- 7 вьиюлнен в виде скобы 10. а другой снабжен резьбовой гайкой 11.
С.коба К) предназначена для установки пес с имп11 1х гибочных шаблонов 12 и осей 13. на к()то)ых П1арнирпо закреплены двуплечие рыча1и 2 и 3, причем плечи малой Д.1ИНЫ выполнены в виде щек 14, жестко еиязани1)1х с плечами 15 и 16, болыпей .1.-|ипы, в которых выполнены открытые с одной стороны пазы 17, и параллельно распо.юженных щекам 14 щек IX с от- версгиями 19.
Корпус 7 снабжен рукояткой 20 для переноски ус1ройства и хранения сменных ги- оочных шаблонов 12. Рукоятка 20 имеет ВИ1Г1 21 для крепления П1аблонов на рукоятке.
.Межд пи ками 14 и 18 установ,тены ролики 22 с зазором 23 между плоскостью роликов 22 и щеками 14 с пазами 17, который на 0,3 - 0,6 мм бол)П1е Д.1ИИЫ конца 24 оси 25. Такая длина конца 24 необходима, чтобы при извлечении осей 25 и.5 отверстий 19 щек 18 между концом 24 оси 25 и щекой 18 образова. 1ся зазор 0,5 0,(i мм, в противном случае выведение oceii 25 с ролнкамп 22 невозможно.
Ролики 22 имеют лыску 26 на нижней грани руч1)Я, которая необходима с одной стороны Д/1Я удобства установки осей 25 с юликами в пхеки 14 и 18 при установленной в гибочный шаблон 12 т)убе 27, а с друюйдля уменьшения холостого
o.ia niiii гибке трубы. Это объясняется тем, чп) ||)и установке ролика 22 без лыс- ки 2Г) он должен пройти своим наружным диамст)ом мимо диаметра трубы 27, а
посте начала гибки выбрать зазор, равный глубине профиля ролика, что и является холостым ходом привода,а наличие лыски 26 позволяет практически его исключить.
Ролики 22, установленные на осях 25, выполнены с одной стороны с упорным буртом 28, высота которого равна зазору 23 между плоскостью гибочного ролика 22 и щекой 14 и который фиксирует оси 25 от выпадания из отверстий 19 шек 18, так как при гибке трубы 27 усилие контакта трубы с ручьями роликов 22 удерживает их на одной высоте, а соответственно через упорный бурт 28 удерживает оси 25 в отверстиях 19, а с другой - с параллельно расположенными лысками 29, которые введены в пазы 17 щек 14 и предназначены для проворота осей в пазах при гибке труб за счет сил трения от вращения роликов 22 на осях 25, а значит, и деформации корытообразной пружины 30, на которой подвешены оси 25 с роликами 22 и которая одновременно является стопором осей 13 от выпадания их из скобы 10.
Для удобства разведения и поворота корытообразной пружины 30 (показано стрелками на фиг. 4) она на своих концах снабжена неметаллическими съемными пробками 31. В случае необходимости замены осей 25 или роликов 22 пробки 31 снимаются и происходит замена осей и роликов.
5
0
5
0
5
Плечи 15 и 16 болыпей длины рычагов 2 и 3 связаны регулируемыми тягами 4 и 5 с силовым приводом поворота рычагов 6, который содержит винт 32, введенный в резьбовую гайку 11, упорный ПОДП1ИПНИК 33, установленный в корпус 34. Винт 32 с подшипников 33 фиксируется в корпусе 34 кольцом 35 и снабжен поводком 36 для установки на конец винта 32 ручки 37 (не показана) для приведения в действие силового привода поворота рычагов 6.
Двуп,тсчце рычаги 2 и 3, |)е1-улирусмые тяги 4 и 5 соединяются с корпусом 34 и между собой осямп 38.
Для определе1шя необходимого угла гиба трубы 27 на шаблоне 12 нанесения щкала 39.
Устройство работает следующим образом.
В случае использования устройства для гибки труб в стационарных условиях устройство закрепляют кронштейнами 8 и 9, например, к верстаку.
Устройство подготавливают к работе следующим образом. Вращают винт 32 с помощью ручки 37 (вручную или любым пневмо-электро-гидронриводом) и ввинчивают винт 32 до упора опорного корпуса 34
в корпус 7. Вручную (и:н)Г)р;1жено пунктиром на фиг. 1) снизу за пробки 31 с помощью корытообразной пружины 30 полпи- мают оси 25 с роликами 22 (фиг. 4, пунктир), выводят оси из пазов 17 щек 14 рычагов 2 и 3 за пределы щек и поворачивают их концами 24 ввер.х и опирают на щеки 14.
Выворачивают винт 21, снимают с рукоятки 20 нужный и1аблон 12 и устанавливают его в скобу 10 корпуса 7, зате.м устанавливают в гибочный п аблон 12 трубу 27, разворачивают оси 25 с роликами 22 вниз концами 24, вводят оси 25 лыс- ками 29 в пазы 17 щек 14 так, чтобы лыски 26 роликов 22 были обращены к трубе 27, и вводят оси 25 концами 24 в отверстия 19 щек 18, отпускают корытообразную пружину, которая поджимает концы осей 25 с лыска- .ми 29 к концам пазов 17.
Устройство подготовлено к работе.
Вращая ручку 37, начинают гиГ)к бы 27 на нужный угол, который определяется по шкале 39, нанесенной на гибочный шаблон 12. По достижении нужного угла гибки трубы вращением ручки в обратную сторону возвращают винт 32 с упорным корпусом 34 до упора в корпус 7.
Вынимают оси 25 с роликами 22 в описанной последовательности, затем трубу 27 из гибочного щаблона 12.
Устройство готово к повторению цикла. В случае использования устройства в условия.х ограниченного пространства на месте монтажа подгоговку устройства к работе проводят в том же порядке, что и при работе в стационарных условиях.
Затем прикладывают устройство гибочным (шаблоном 12 к т)убе 27 в нужном месте гибки и в положении, необходи.мо.м для направления г ибки так, чтобы труба 27 воп1ла в паз гибочного П1аб,1она 12, устанавливают оси 25 с роликами 22 в щеки 14 и 18 в указанной последовательности (положение устройства может быгь горизонтальным, вертикальны.м с направлением гибочного ц аблона вверх и. П1 вниз, вправо или влево, т. е. лкпЗое |1(),1ожение в пространстве) и вращение.м ручки 37 (или другим приводом) сгибают рубу на нужный угол. По окончании гибки вращением винта 32 возвращают опорный корпус 34 до упора в корпус. 7, вынимают оси 25 с ро
ликами 22 в описанном порядке и снимают устройство с трубы 27.
Устройство готово к повторения цикла.
Устройство может использоваться в условиях ограниченного пространства на месте монтажных работ для гибки труб в различных плоскостях благодаря конструкции осей гибочных роликов, позволяющих оперативно снимать и устанавливать их вместе с роликами в любых местах с возможностью установки трубы в гибочный щаб- лои спереди. Применение двуплечих рычагов, на меньщих плечах которых расположены гибочные ролики, позволяет меньц1ить усилие гибки.
Формула изобретения
5
О
0
0
5
0
Устройство для гибкп в стесненных vcлoвияx, содержа1 1с; и имный шаблон, два подвижных относи кмьно щаблона гибоч1Ц)1х ро,1ика. устан1М.(нных на параллельных осях, смонтированных на поворотных рычагах, кинематич1Ч ки связанных с силовым приводом, отличающееся тем, что, с целью pacцJИpeния технологических возможностей путем обеспечения в условиях ограниченного пространства гибов в различных плоскостях, оно снабжено узлом вывода гибочных роликов из зоны гибки и фиксации, вьпюлненным в виде корытообразной формы npoBO.KviHt) пружины, связанной со стороны свободных концов с соответствующими осями гибочного ролика и закрепленной на осях поворотных рычагов, каждый поворотный рычаг вьпюл- нен двуплечим с разными д, 1инами п, 1еч, плечо меньшей длины выполнено в виде двух параллельно расположенных и жестко связанных с плечо.м больи ей длины щек, одна из щек выполнена с отверстием, а другая -- с открыты.м с о.июй стороны пазом, каждая ось гибочною ролика снабжена буртом, высота которого равна расстоянию между противоположной бурту щекой и торцовой плоскостью гибочного ролика, конец оси со стороны бурта с длиной по толщине щеки выпо, 1нены цилиндрическим и размещен в отверстии П1еки, а д))ой конец оси выпо,1нгп с двумя па- рал,чельными одна другой лысками для фиксации в пазу другой щеки, припс д поворота рычагов связан с плечами большей длины, а каждый гибочный ролик выполнен с ,1ыс- кой на одной из граней ручья.
33 34
35
31
г

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для двухсторонней гибки труб | 1986 |
|
SU1449176A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1304958A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| Станок для соединения витков плоской спирали скобами | 1985 |
|
SU1378987A1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ГИБКИ ТРУБ В ДВУХ ПЛОСКОСТЯХ | 2005 |
|
RU2292974C2 |
| Станок для гибки труб | 1983 |
|
SU1171144A1 |
| Станок для гибки трубных панелей | 1985 |
|
SU1400709A1 |
| Приспособление для гибки труб с ручным приводом | 1986 |
|
SU1428487A1 |
| Трубогиб с ручным приводом | 1986 |
|
SU1424909A1 |
| Устройство для пространственной гибки заготовки из проката | 1990 |
|
SU1750783A1 |

Изобретение относится к устройствам для гибки труб преимущественно в стесненных условиях на месте монтажа. Цель изобретения - расширение технологических возможностей устройства путем обеспечения в условиях ограниченного пространства гибов в различных плоскостях. Устройство содержит установленный на опоре 1 сменный шаблон (Ш) 12 и закрепленные на Ш с помощью осей 13 двуплечие рычаги (Р) 2 и 3. На коротких плечах Р на осях 25 установлены гибочные ролики (ГР) с возможностью быстрого их выведения из исходного положения. Длинные плечи Р кинематически связаны с приводом поворота ГР осуществляется корытообразной пружиной 30. Устройство производит гибку труб в различных плоскостях в условиях ограниченного пространства на месте монтажных работ, позволяя оперативно снимать и вновь устанавливать ГР, обеспечивая установку трубы в гибочный Ш спереди. Наличие двуплечих Р, на коротком плече которых смонтированы ГР, позволяет уменьшить потребное усилие гибки. 5 ил.
13
Г
19
/5
Ю
| Устройство для гибки труб | 1983 |
|
SU1181740A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
