Изобретение относится к подъемно-транспортному машиностроению, а именно к уравновешивающим подъемным устройствам.
Цель изобретения - снижение материалоемкости путем использования в качестве противовесов массы силового цилиндра.
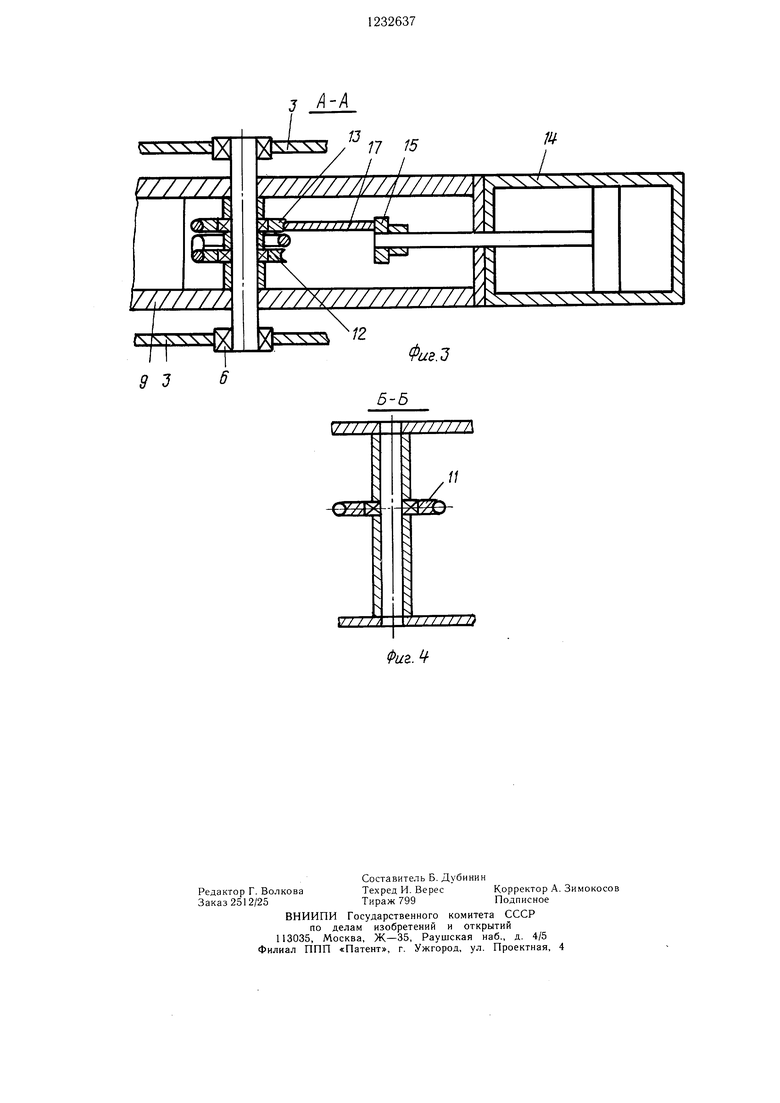
На фиг. 1 изображено уравновешивающее подъемное устройство; на фиг. 2 - то же, измененное положение рукояти; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1.
Уравновешивающее подъемное устройство содержит стойку 1, на которой установлена колонна 2 с закрепленным на ней корпусом 3 с горизонтальными 4 и вертикальными 5 направляющими. В направляющих корпуса 3 расположены шарниры 6 и 7 ры- чажно-шарнирной системы, состоящей из рукояти 8, стрелы 9 и тяги 10, которые образуют параллелограмм. В корпусе 3 установлен блок 11, а на стреле 9, соосно шарниру 6, установлено два блока 12 и 13 (фиг. 3) На продолжении стрелы 9 вдоль ее оси закреплен силовой цилиндр 14. На штоке цилиндра установлена траверса 15, к которой прикреплены ветви 16 и 17 гибкого тягового органа. Ветвь 17 огибает блоки 13, 11 и через блок 12 возвращается как ветвь 16 на траверсу 15. На рукояти 8 закреплен грузозахватный орган 18. На цилиндре 14 предусмотрены места для крепления дополнительных противовесов 19.
Устройство работает следуюшим образом.
На стойке 1 установлена колонна 2 с корпусом 3. Стреловая система, состоящая из рукояти 8, стрелы 9 и тяги 10, образующая
0
5
0
параллелограмм, взаимодействует шарнирами 6 и 7 с корпусом и частично уравновешена массой цилиндра 14. Полная уравновешенность обеспечивается навещиванием дополнительных противовесов 19 (фиг. 1).
При подаче воздуха в штоковую полость цилиндра 14 шток перемещается вправо, выбирая при этом длину ветвей 16 и 17 гибкого тягового органа, прикрепленного к траверсе 15 и огибающего блок 11, закрепленный на корпусе 3. В этом случае шарнир 6 перемещается по вертикальной направляющей 5 корпуса 3 вниз, обеспечивая тем самым перемещение грузозахватного органа 18 с грузом вверх (фиг. 2). При выпуске воздуха из штоковой полости цилиндра 14 шток перемещается влево. При этом шарнир 6 перемещается вверх, а грузозахватный орган 18 с грузом перемещается вниз.
При изменении положения рукояти 8 в направлении к колонне 2 щарнир 7 перемещается в направляющей 4 корпуса 3 вправо. При этом стрела 9 изменяет свой угол наклона относительно вертикальной оси колонны 2 и конец стрелы 9, с закрепленным на ней цилиндром 14, перемещается вверх (фиг. 2). При этом происходит изменение лтлин ветвей 17 и 16, закрепленных на траверсе 15, вследствие набегания ветвей 17 на блок 13 и сбегания ветви 16 с блока 12, которое обеспечивается поворотом блока 11 (фиг. 4).
Концы ветвей 16 и 17 закреплены на траверсе 15 на расстоянии друг от друга, равном диаметру блока 13. Диаметр блока 13 равен диаметру блоков 11 и 12.
/
j jbl
9 J
Ш
Фиг. З
Фиг.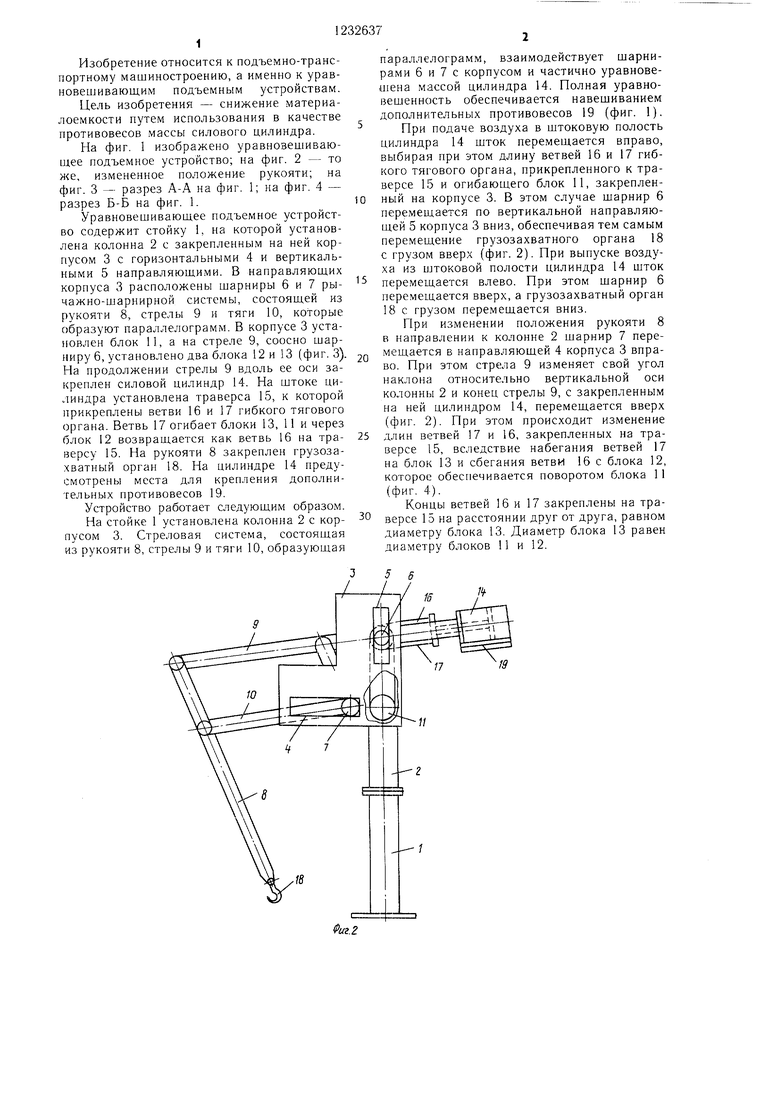
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Уравновешивающее подъемное устройство | 1982 |
|
SU1087454A1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Манипулятор | 1984 |
|
SU1255553A1 |
| Уравновешивающий подъемник | 1987 |
|
SU1437344A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
