Изобретение относится к обработке металлов давлением, в частности к манипуляторам, обслуживающим прессы для калибровки нагретых кольцевых заготовок большого диаметра.
Цель изобретения - снижение металлоемкости и noBbiujeHHe удобства обслуживания.
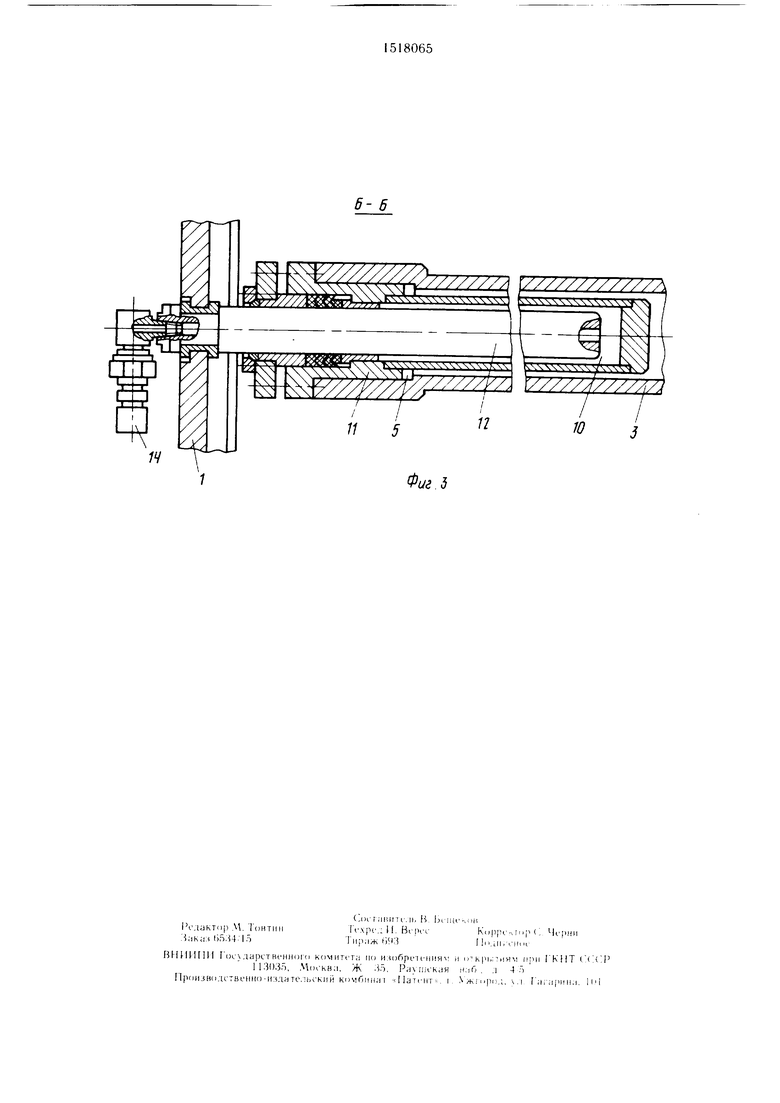
Па фиг. I представлен захват обп1пй вид; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - разрез Б - Б на фиг. 2.
Устройство захвата состоит из корпуса I с направляющими 2, короткой щтанги 3 и длиной штанги 4 с расточками 5, рычагов захвата 6. реек 7 и 8, шестерни 9, гидроцилиндров 10 с обоймами li и плунжерами 12.
Корпус I захвата имеет две горизонтальные расточки, в которых размешаются и перемещаются в направляющих 2 короткая и длинная щтанги 3 и 4, и две вертикальные расточки - первая для раз.мешения опор оси синхронизирующей щестерни 8 и вторая - для размещения опоры и цилиндра подхема захвата (не показаны).
Па свободных, выступающих из корпуса захвата концах штанги 3 и 4 крепятся рычаги захвата 6. Па противоположных концах
штанг выполнены выемки о. в которых размещены и закреплены оГк)ймы II гидропил- линдров И). Свободные К1)Н11Ы плунжеров 12 гидроцилиндров И) крепятся к горцу корпуса I. Штанги 3 и 4 oopanieiuii.ie к другу лыски, на которых крепятся рейки 7 и 8, находящиеся в зацеплении с синхрони зируюшей шестерней 9.
Устройство захвата является составной частью манипулятора 13 и может перемешаться механизмами манипулятора в вертикальной и горизонтальной п;1оскостях.
Устройство захвата работает следующим образом.
Манипулятор перемещает захват так, чтобы раздвинутые рычаги захвата 6 на штангах 3 и 4 охватили нагретую заготовку 14 на столе печи (не показан), после чего дается команда на захват заготовки Рабочая жидкость от гидросистемы манипулятора подается через подвод 14 и отверстие в плунжере 12 в полость гидроцилиндра К) короткой щтанги 3, которая начинает перемещаться вперед в направляющих 2 корпуса I. При этом рейка 7 вращает шестерню 9, а последняя перемещает рейку 8 и связанную с ней
(Л
ел
00
о
05 СП
длинную штангу 4 навстречу штанге 3. Масло из гидроцилиндра длинной штанги сливается в бак, а рычаги 6 на штангах 3 и 4 синхронно сближаются, захватывая заготовку 14.
К()нтроль захвата заготовки производится по величине уси. шя зажима реле давления или нутгвым конечным выключателем по ве- ;|ич11не перемещения штанги. Затем манипулятор перемешает устройство захвата на по- зицию загрузки заготовки в штамп для ка- .1ибровки на выдвижном столе, после чего дается команда на разжи.м захвата.
Рабочая жидкость поступает в гидроцилиндр длинной штанги 4, которая начинает двигаться вперед. Через рейки Ь и 7 njecTep- ню 9 приводится Б движение KOfJOTKaH штанга 3. Масло из гидроцилиндра короткой штанги сливается в бак, рычаги захвата синхронно расходятся, освобождая заготовку
Формула изобретения
Устройство захвата манипулятора пресса, содержащее корпус, штанги с рычагами захватов, а также плунжерные силовые цилиндры привода перемещения штанг, отличающееся тем, что, с целью снижения металлоемкости и повышения удобства обслуживания, 1птанги выполнены с выемками на кон- пах, противоположных рычагам захватов, обоймы силовых цилиндров размещены в выемках П1танг, а свободные концы плунжеров цилиндров закреплены на корпусе.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок в пресс | 1984 |
|
SU1278249A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1997 |
|
RU2131355C1 |
| Устройство для гибки обечаек из листовых заготовок | 1985 |
|
SU1269881A2 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ЗАГОТОВОК в РАБОЧУЮ ЗОНУ МНОГОПОЗИЦИОННОГО ПРЕССА | 1972 |
|
SU343876A1 |
| Гидровинтовой пресс-молот | 1978 |
|
SU721338A1 |
| Портальное загрузочное устройство | 1979 |
|
SU872195A1 |
| Станок для деформирующего протягивания длинномерных труб | 1985 |
|
SU1276482A1 |
| Гидравлический пресс для калибровки трубчатых заготовок | 1975 |
|
SU548441A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
Изобретение относится к обработке металлов давлением, в частности к устройствам для перемещения штучных заготовок. Цель изобретения - снижение металлоемкости и повышение удобства обслуживания. Устройство содержит корпус, штанги с рычагами захватов, а также силовые цилиндры привода перемещения штанг. При подаче команды жидкость поступает в силовые цилиндры, производя перемещение плунжеров, которые осуществляют синхронное сближение рычагов захватов к заготовке. Затем заготовка переносится в рабочую зону пресса. 3 ил.
фиг./
А- А
12
фиг.2
14
Фиг.д
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
