(54) ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ
1
Изобретение относится к грузоподъемным устройствам для вертикального транспортирования и поэтажного складирования штучных грузов, которые могут быть использованы в любой отрасли машиностроения, в частности в атомном машиностроении и котлостроении при складировании труб и других изделий цилиндрической формы.
Известно устройство для штучных грузов, содержащее вертикальный конвейер, имеюший раму, цепной тяговый орган и копиры, причем последние смонтированы на передаточных механизмах, выполненных в виде двух соединенных связями шек, установленных на направляющих рамы конвейера с возможностью вертикального перемещения 1.
Недостатком устройства является то, что передаточный механизм не может осуществлять вертикальных перемещений для поэтажной подачи грузов, необходимы дополнительные грузоподъемные средства, на что затрачивается определенное время, при этом снижается производительность конвейера. Кроме того, исключена возможность использования устройства в автоматическом режиме.
Наиболее близким к предлагаемому является загрузочно-разгрузочное устройство для многоярусных стеллажей, включающее 5 установленные в начале и в конце каждой полки стеллажа передаточные механизмы, каждый из которых выполнен в виде закрепленного на валу захватного органа и узла, взаимодействующего с вертикально замкнуто тым конвейером, имеющим грузоноситель на цепи 2.
Недостаток известного устройства заключается в невысокой производительности.
Цель изобретения повышение производительности.
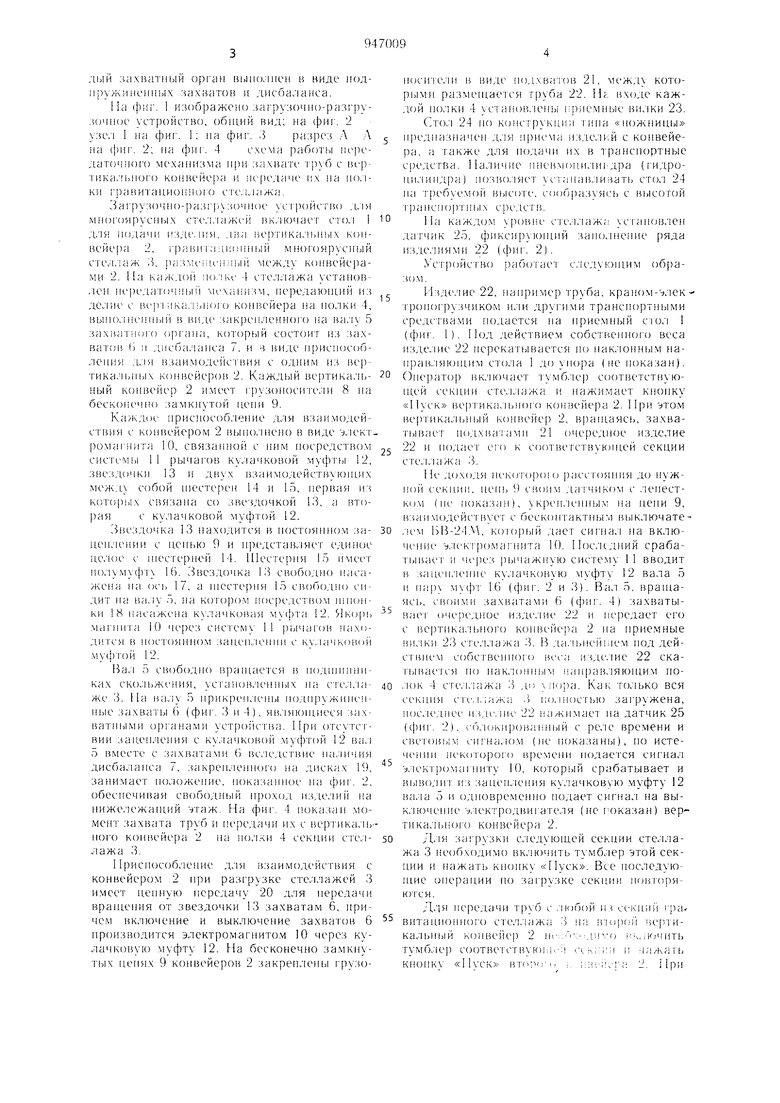
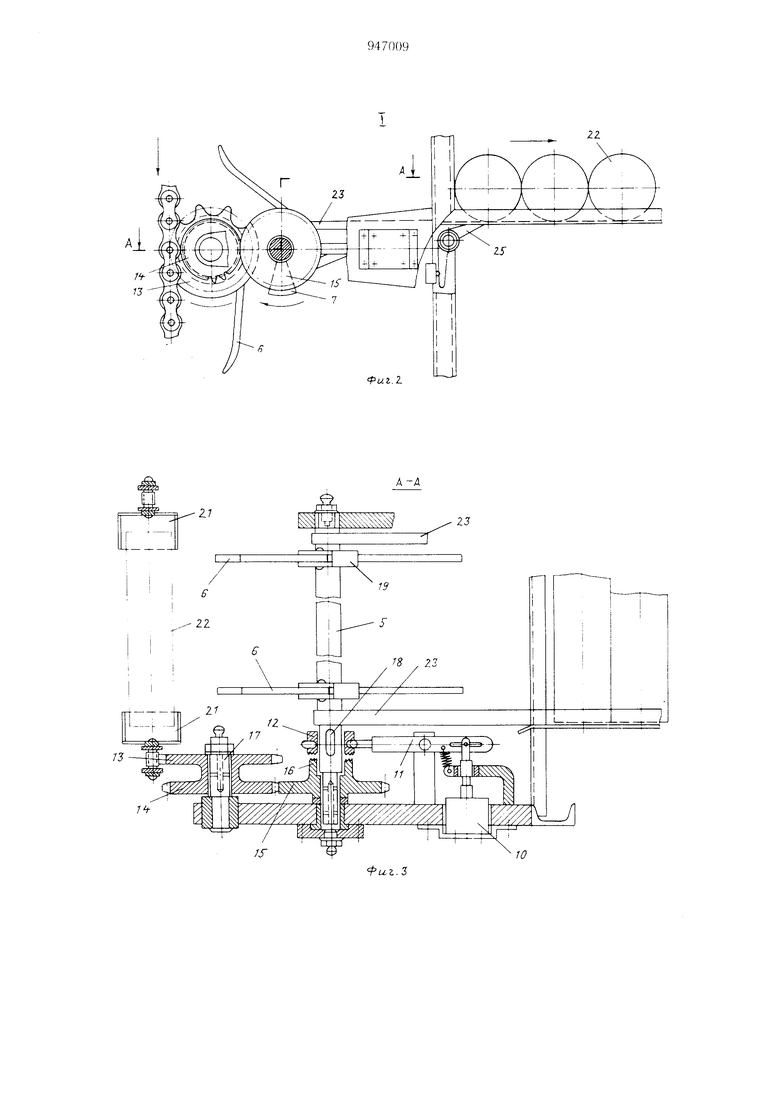
5 Указанная цель достигается тем, что каж дый узел выполнен в виде электромагнита, связанной с ним посредством системы рычагов кулачковой муфты, которая установлена на валу, звездочки, размещенной с возможностью взаимодействия с цепью, и двух взаимодействующих между собой щестерен, одна из которых связана со звездочкой, а другая - с кулачковой муфтой, при этом кажлыи захватный о)1ан выполнен в виде иоднружигюнпых захватов и лисба;1аиса. Па (jiiir. 1 изображено загруз()чно-раз1-ру:«)ЧП()С устройство, общий вид; иа фиг. 2 узе.1 иа . 1: иа фиг. 3 разрез Л Л на ()1И1. 2; tia фиг. 4 схема )аботы персдатс))1() механизма и|)и .захвате труб с вертика.п ног-о и 11е)едаче их иа полки гравитациоии()|-о ете.члажа. Заг)узочно-1)азг|): ом11ое ycTpoiicTiio лля миогоярусньгх ст(1лажей вк.иочает сто.л 1 Л.1Н молами изле. iiiM, .usa 15е Г Т1кальИ111х коивейе)а 2, |равита;пи111ны 1 .многоярусный стел.аж .. 1азмеп.)Н1 межлу к и1вейе1)ами 2. Иа ка/клой iio.iKc 4 стсл;лажа устаиов,1еи иерелаточ 11)|Г| мехаг:и: м, перелающий из ле,тие с ве|11 икальпого коир.ейера на полки 4, выполненный в виле зак)енлени()го на Ba.iy 5 захват 1ог() ор/гана, который состоит из .захватов () | лисбал.анса 7, и виле нрисиособлеиии .тля взаимолейст1 ия с олним из тикалын 1х конвейе)ов 2. Каждый вертикал ный коивейе) 2 имеет г)Зоиоеи1Ч 1и 8 иа бесконечно замкнутой цени 9. Кажлое присн()еоб;1еиие лля взанмолействия с конвейером 2 ,1неио к виде э.лек ромагнита 10, связашюй с IHIM ноередство.м системы 11 рычагов кулачковой му(()ты 12, звездочки 13 и лвух взаи.модейстгитощих межл еобой И1есте км1 14 н 15, нервая из кото|)ых связаиа со звезлочкой 13, а irro)ая е кулачковой муфтой 12. Звезлочка 13 нахолитея в постоянном зацеплении с leiii.K) 9 и иредстав;1яет единое ue.ioe с Н1есте)ией 14. Шеетерия 15 имеет (|)т 16. Звездочка 13 свободно насажена на OCI) 17, а И1еете)ня 15 о ободно сидит иа валу 5, на котором н()С)едетвом IHHOHки 18 наеажсна ку.тачковая муфта 12. Яко)1 магнита К) че)ез систем} 11 рычагов находится к иостояином заиен.пении с ку.лачковой .1у(|)той 12. Вал 5 свободно вращается в ||од1иинниках ско;1ьжения, устано15ле 11И)ГХ иа етел:1аже 3. hi Ba.iy 5 ирнкренлепы нолнружииениые захва1Т)1 ( (фиг. 3 и 4), являюпшеея захватными органами уст)())а. При отсутствии заце11;1ения с кулачковой муфтой 12 вал 5 в.меете с захвата.ми G (кмедствие 11а.;1ичия дисбаланса 7, закреилениого на диеках 19, занимает ноложение, показанное на с)иг. 2, обеенечивая свободн1 1Й проход изде,1ий на нижележащий (таж. На фиг. 4 ноказан .момент захвата труб и н()едачи их с 1 ер1Т1кального конвейера 2 на но.тчи 4 секции ете;1л а ж а 3. 11риеиособление л.1я взаимолействия с конвейером 2 при раз рузке сте;|лажей 3 имеет ценную перелачу 20 для передачи вращения от звездочки 13 захватам 6, причем включение и выключение захватов 6 ироизводится электромагиито.м 10 через кулачковую муфту 12. На бесконечно замкнутых цепях 9 конвейеров 2 закре11,тен1л грузоносшели в виле нолхватов 21, межлу которымп размепгается труба 22. Иг вхоле каждой нолки 4 устанор,,1ены 1;р.ием1Ц)1е ви;1ки 23. (/ro,:i 24 но конет пт ции тина «ножницы предназначен для приема изле.лий с конвейера, а также для полачи их в траненортные средетва. Наличие ннев.моци,1И1-дра (гт1дроци.тиндра) позво.1яет ч-тана1 ли ать стол 24 на требуемой BI.ICOTC, сооб|)азуясь с высотой транс11ор1И1)Гх С)елс1Т. На кажл(хм 1ови1 стел.лаж;: станов, латчик 25, ())иксирую|ций заио,|нение ряда изде.шями 22 ((})иг. 2). )йство работает следующим o6i)a 1зде,1ие 22, например труба, краиом- лек- троиогрузчиком И.1И другими транспортными средствами юдается на приемный CTO.i (фи1 1). Под действием еобствеинслч) веса изде,тие 22 перекатывается по нак.юнньгм нанрав,:1яюи1им стола 1 ло унора ( не иоказан). Онератор вк/почает тумб,1е|) соот етстЕП-ющей секиии сте.ллажа и иажи.мает кноику «Пуск ве|)тика,-|ьного ксзивейера 2. При это.м ве пт1ка;| лн 1Й конвейе) 2, вращаясь, захватывает нолхва|-амн 2 оче)едное изделие 22 н нолает его к соответствукицей секции ете,т;1ажа 3. Не лохоля неко1opoio расстояния ло нужной секции, неШ) 9 е.ноим лаччиком с .ченестком (не ноказан), креи.1енн1 на цени 9, взаимодействуе с бееконтактн1(м вв1ключате/uM .V, кото)ый лает сигна.1 на включение .1ек1ромагнита К). Пос.кдний срабатывает и ч(рез р1 1чаж11ую систему I 1 вводит в 3aneirieiHte ку.лачковую муфту 12 вала 5 и на) My(frr 16 ((jutr. 2 и 3). Вал 5, вращаясь, своими захватами ( (. 4) захватыва(т очерелиое изде,ти( 22 и. передает его с вертика, ьного кои ейера 2 иа приемные ви,1ки 23 сте,,тажа 3. В да.11Л1е 11не.м иод действнем собственио1о веса изде.ше 22 скатьшается но иак,1онн1 1 1 иаи|)ав,1яюишм по/юк 4 стел,лажа 3 л ,т )ра. Как то.лько вся секция сте.г;ажа 3 полностью за1ружена, нос.лелнее и.1ле.1нс- 22 11ажнмаел на датчик 25 ((|)иг. 2), сб,1())1)аг:ный с pe,ie времени и cBCToiibiM сигнало.м (не ноказаШ)), но истечении нек(ггорого в)емени подается сигнал ъ,1ектромагниту К), который ср;)батывает и выволит из зацен.ления ку.чачковую муфту 12 а,ла 5 и олнов)еменно нолает сигнал на вык.тючение -электродвигателя (пе г-оказан) вертикального конвейе)а 2. /1,,ля загрузки с,лед Ю1цей секции стеллажа 3 пe(Jбxoди.мo включить тчмб.лер 5той секции и нажать кнопку «Пуск. Все носледуюН1ие с,нерации по за1-рузке секции пг)влч)ряЛ.1я иерелачи с .любой из сс-кннй гравитаиионного сте,1,лажа 3 па вюрой зер/тикальньц) KOHBeiiep 2 HV . :.i;p.f) „iioiniTb тумб.лер соотвелслл ло1):г:| ct ; ;;;:;i и лажа1Т) кнопку «Пускх- вло; ;:, ; ;:;и;: - ;; 2. При
этом срабатывает электромагнит 10 и через систему 11 рычагов и кулачковую муфту 12 передает вращение захватам 6, которые, захватив очередное изделие 22, подают его на передающие вилки 23 стеллажа 3, по которым оно скатывается в зону действи я подхватов 2 второго вертикального конвейера 2, который подает изделие на стол 24 выдачи. После выдачи всех изделий 22 с данной секции стеллажа 3 или при не обходимости прекращения подачи с данной секции нажимается кнопка «Стоп.
Для выдачи труб из следуюпхей секции стеллажа 3 включается тумблер этой секции и кнопка «Пуск. При этом включается электромагнит 10 требуемой секции и цикл работы повторяется.
Положительный эффект состоит в том. что использование предлагаемого устройства позволяет в необходимый момент осуществлять поворот захватных органов, сидящих на валу передаточного механизма, заполняя при этом каждый уровень стеллажа с больщей производительностью.
Формула изобретения Загрузочно-разгрузочное устройство для многоярусных стеллажей, включающее установленные в начале и в конце (;й iio.iки стеллажа передаточные ме.ханиим., каждый из которых выполнен в виде закрепленного на валу захватного органа и узла, взаимодействующего с вертикально замкнутым конвейером, имеющим грузоносителн на цепи, отличающееся тем, что, с целью пoвыщeJ ния производительности устройства, каждый узел выполнен в виде электромагнита, связанной с ним посредством системы рычагов кулачковой муфты., которая установлена на валу, звездочки, размещенной с возможностью взаимодействия с цепью, и двух взаимодействующих между собой шестерен, одна из которых связана со звездочкой, а друтая с кулачковой муфтой, при этом каждый зах5 орган выполнен в виде подпружиненных захватов и дисбаланса.
Источники информации, нринятые во внимание при экспертизе
0
1Авторское свидетельство СССР Л1; 419446, кл. В 65 G 17/00, 1971.
2.Авторское свидетельство СССР
Хо 753740, кл. В 65 G 47;74, 1976 (прототип) .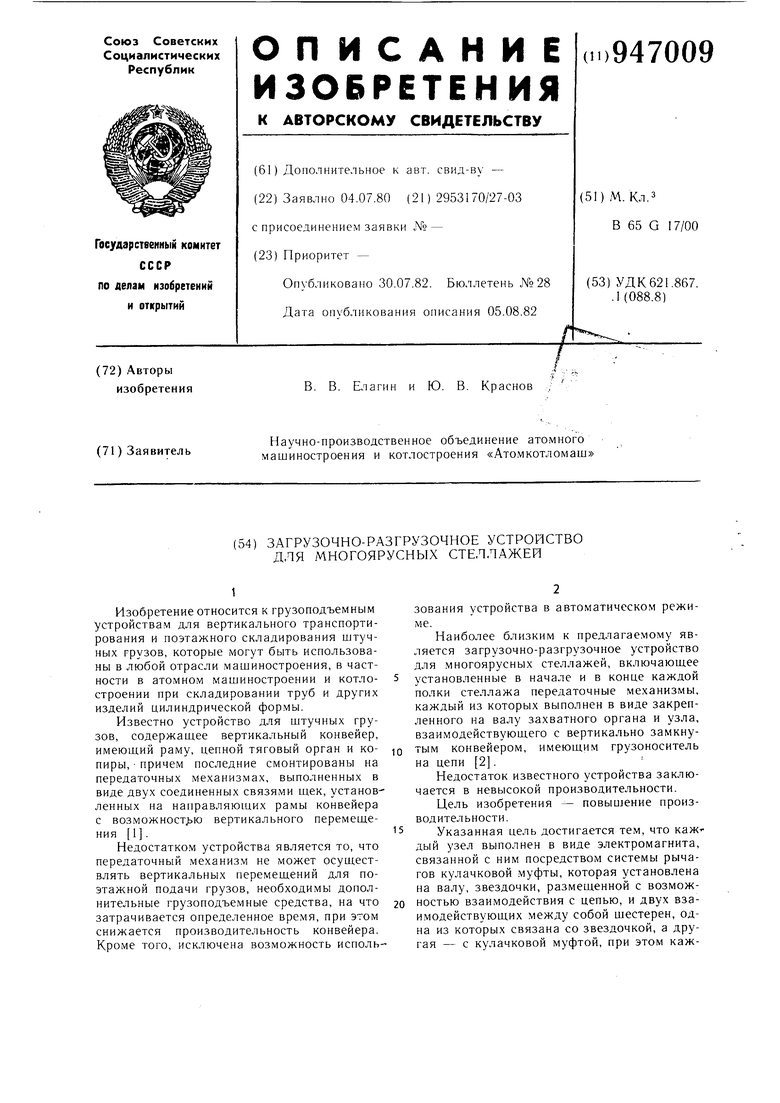

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Автоматизированный высотный склад для хранения штучных грузов | 1986 |
|
SU1532451A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| Пластинчатый конвейер | 1984 |
|
SU1175815A1 |
| Транспортно-накопительная система | 1986 |
|
SU1331746A1 |
| Установка для межоперационного транспортирования грузов | 1983 |
|
SU1174350A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
-
uz.Z HI
