(21)4360640/25 12
(22)07.01.88
(46) 07.1 1.89. Бюл. Ле 41
(71)Ленинградское научно-нроизводстнсн- ное объединение «Б рерич тник-
(72)П. Д. Загороднюк (5;3) 621.778.28(088.8)
(56) Авторское свидетельствк) С(.СР 665972, кл. В 21 F 1/04, 1977.
(54) .АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ЗИГЗАГООБРАЗНЫХ ПРУЖИН
(57) Изобретение относится к области изготовления зигзаг ообразных пружин, которые могут найти нрименение в .машиностроении и приборостроении, и позволяет расширит) те.хнические возможности. В автомате, содержаше.м привод, гибочный ме.ханизм, стройства подачи 7 и рихтовки 6 проволоки, гибочный механизм выполнен в виде двух кулачков 1, поворачиваемых на заданный уюл вокруг на,ты1а, имеющего возможность осевого перемещения при помощи клина и пружины, причем заданный шаг и прямолинейность пружины обеспечиваются упорами 10 и II. 2 ил.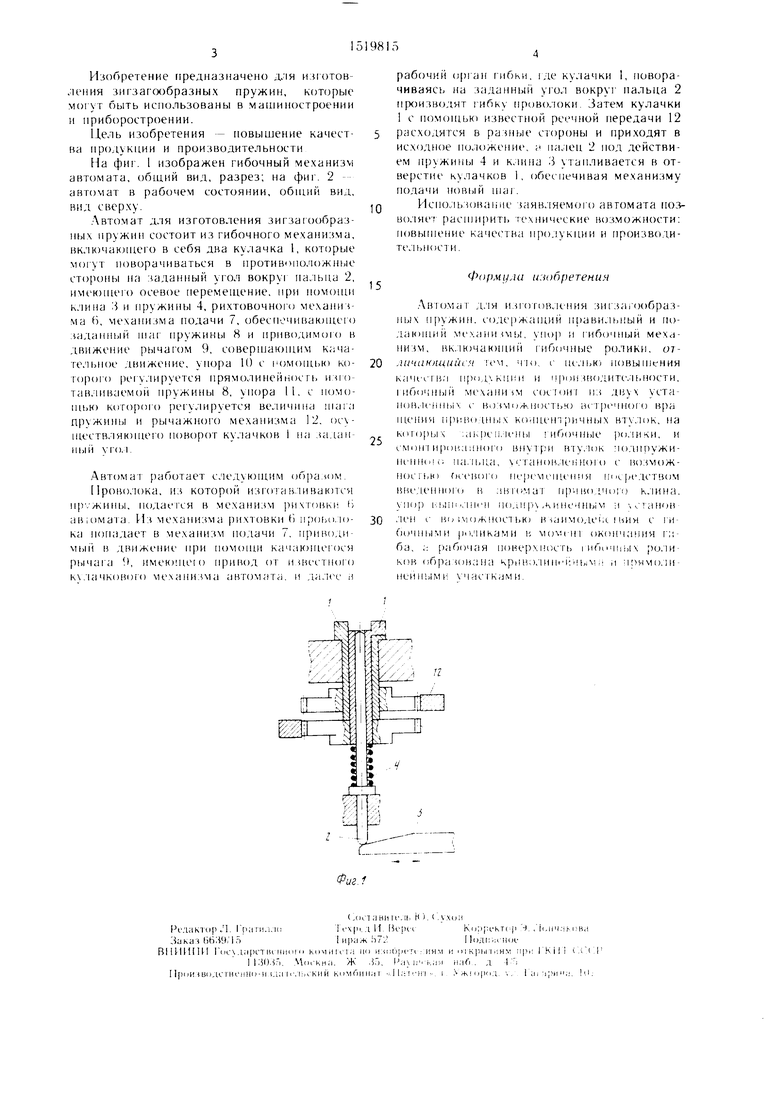
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для отрезки и гибки проволочных деталей | 1979 |
|
SU874246A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ СЛОЖНОЙ КОНФИГУРАЦИИ ИЗ ПРОВОЛОКИ | 1970 |
|
SU263557A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗИГЗАГООБРАЗНЫХ ИЗДЕЛИЙ ИЗ ЛЕНТЫ ИЛИ ПРОВОЛОЧНЫХ ЗАГОТОВОК | 2010 |
|
RU2425727C1 |
| Автомат для изготовления гнутых изделий | 1986 |
|
SU1400739A1 |
| Автомат для изготовления гнутых изделий из проволоки | 1984 |
|
SU1240492A1 |
| Автомат для изготовления из проволоки деталей типа штырей | 1984 |
|
SU1252008A1 |
| Устройство для гибки профиля круглого сечения | 1986 |
|
SU1516176A1 |
| АВТОМАТ ДЛЯ ОТРЕЗКИ И ГИБКИ ПРОВОЛОЧНЫХДЕТАЛЕЙ | 1972 |
|
SU433944A1 |
| Устройство для изготовления и запрессовки проволочных штырей в изделие | 1990 |
|
SU1727948A1 |
| Гибочный автомат | 1960 |
|
SU142288A1 |
Изобретение относится к области изготовления зигзагообразных пружин, которые могут найти применение в машиностроении и приборостроении, и позволяет расширить технические возможности. В автомате, содержащем привод, гибочный механизм, устройства подачи 7 и рихтовки 6 проволоки, гибочный механизм выполнен в виде двух кулачков 1, поворачиваемых на заданный угол вокруг пальца, имеющего возможность осевого перемещения при помощи клина и пружины, причем заданный шаг и прямолинейность пружины обеспечиваются упорами 10 и 11. 2 ил.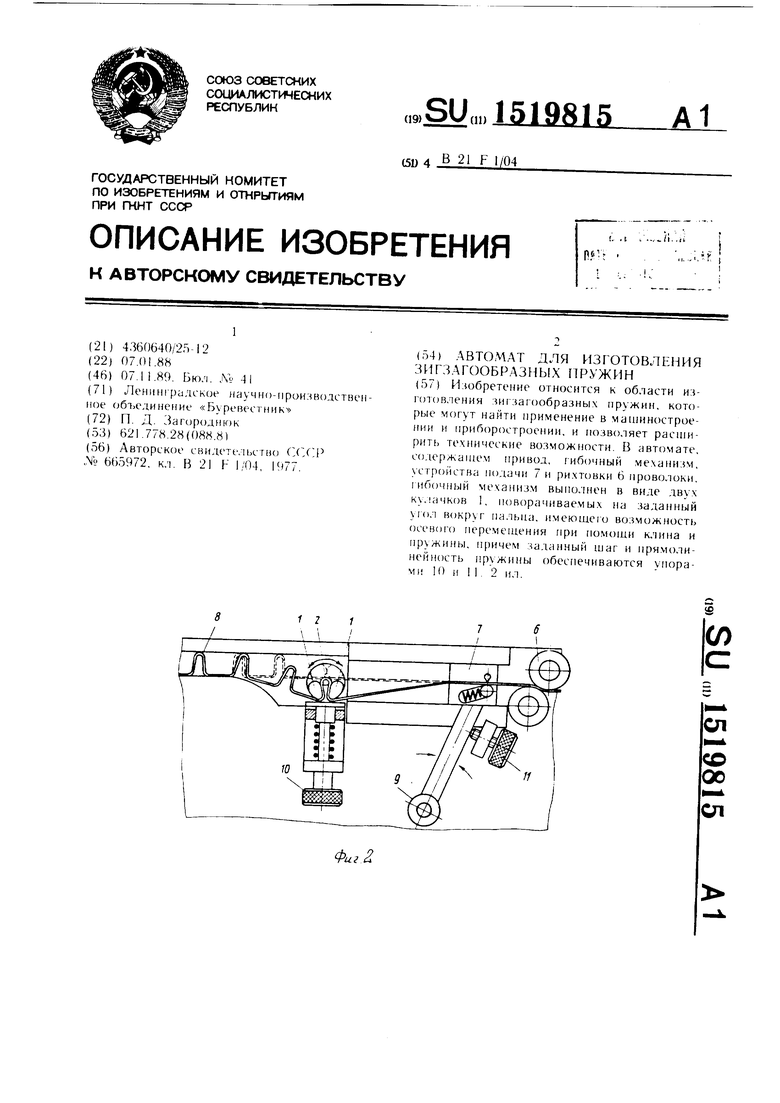
(Л
ел
;о
00
ел
Изобретение предназначено для изтотов ления зигзагообразных пружин, KOKjpbie могут быть использованы в машиностроении и приборостроении.
11,ель изобретения - повьииение качест- ва продукции и производительности
На фиг. 1 изображен гибочный механизм автомата, общий вид, разрез; на фиг. 2 автомат в рабочем состоянии, обни|й вид, вид сверху.
.Лвтомат для изготовления зигзагообразных пружин состоит из гибочного механизма, вк;1К)чакмие1Ч) в себя два кулачка 1, которые могут поворачиваться в противоположные стороны на заданный угол вокруг пальца 2, имек)П1его осевое перемещение, при помоп1и клипа и пружипы 4, рихтовочного механизма 6, механизма подачи 7, обеспочивающего заданный inai пружиньи 8 и приводимого в движение рь11чагом 9, соверп аюп1им тельное движение, унора И) с иомопи к) ко- ropoi o регулируется прямолинеЙ110с гь изго- тав. 1ИВс1емой пружины 8, унора II, с помо- 1пьк) которого регулируется ве.чичииа тага пружины и рычажного механизма 12. пач твляюним о поворот ку;1ачков I па за.1а
ИЫ11 уГО.1.
Автомат работает следук)П1ИМ обра.sow.
IpoBo. ioKa, из которой изгогав.ливаютс ||р . жины, подаегся в механизм рихгог ки ti ав;омага. Из механизма рихтовки ti iipofio.io- ка попадает в механизм подачи 7. ||рииоди- мьи1 в движепие ири юмощи качаюиюгося р1)1чага 9, имек) )Д от 1пвсст 1о1 о кх.тачковок) механизма автомата, и дл.;1(Ч п
5
5
0
0
О
5
рабочий орган гибки, где ку:1ачки , поворачиваясь на заданный угол вокруг пальца 2 производят гибку проволоки. Затем кулачки 1 с помощью известной реечной передачи 12 расходятся в разные сгороны и приходят в исходное пол1)жепие, ; na;ieu 2 под действием нружиШ) 4 и клина .} утапливается в отверстие кулачков 1, обеспечивая механизму подачи новый таг.
Использование заявляемо1Ч) автомата ноз- во.тяет расп1и)ить технические возможности: повышение качества ).1укции и производи- те,льпости.
Формула и лобретения
.Лвгомат д.чя и.готовления зи за ообраз- ных п)ужип. содержащий правильный и подающий .мехаии . упор п гибочный мех)- низм, вк.лючающий ибочные ролики, О7- .тчиплит и я , Ч Ю. г псл1,ю 11() качества п))Д кипи и )изиодит(..тьности, 1пбочн1)1Й механи iM состой пз двух уста- , ir.Hiibi с В1)зможм1Н тьк) встречного в)а щсиия ii|niiioчпых Kodiu-m )11чных втулок, на Koropijix ;акрс 1. 1е111,| ибочные ро..ки, и СМ01Г1 () внутри вту.юк 1од111)ужи- Hi fifiiHo iia. ii,ii,a, CTanoB.ieiiHoro с возможностью f ceBoi o персличпения ш и рс.тством Bfic. ien fioro tt лш о.мат ii|)4 водчогг.) к,. упор ..шсн iio.iH|n ,н inu -fHbiM ;i лен г В1) ivio/KHoci ью и таимодси, i luiH с ги- 0(.ч11ыми (|и, 1иками 1, Movi Hi окончания i ;i- ба, :: Рабочая поверхность i HOiiMiiiiix ;)оли- ков образована кр11Н;)лин1М;г ьл1й и ;i)Hvio. iii- неиным ; часткам и.
