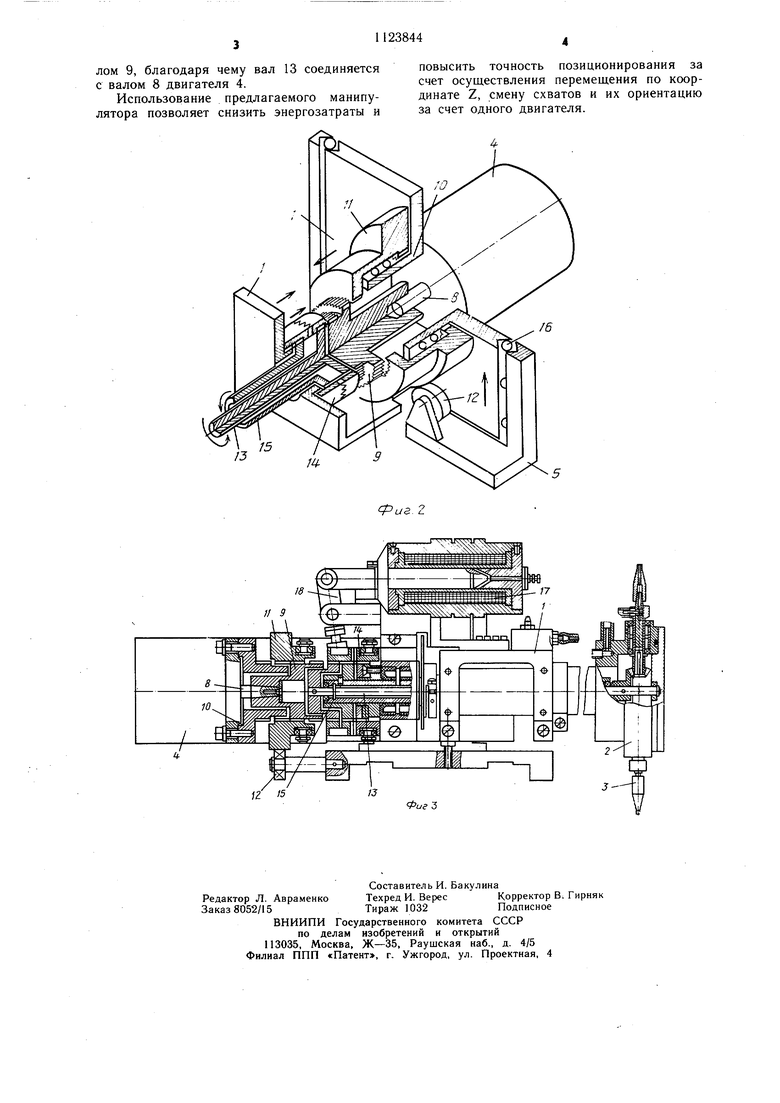
Изобретение относится к машиностроению и может быть использовано в манипуляторах различного назначения, в частности при сборке макросборок. Известна конструкция манипулятора, служащая для перемещения детали по нескольким координатам. Как правило, движение по каждой координате обеспечивается саамостоятельным приводом 1. Недостатком известного манипулятора является сложность конструкции и насыщенность приводами,, что существенно увеличивает габариты и вес оборудования. Наиболее близким к предлагаемому является манипулятор, содержащий подвижно установл енный на опорной плате корпус, револьверную головку со сменными схватами, механизм координатного перемещения поворота этой головки и схватов.и двигатель 2 Известный манипулятор имеет сложную кинематическую схему, что увеличивает его габариты и повыщает энергозатраты, а также снижает точность позиционирования. Цель изобретения - снижение энергозатрат и повышение точности позиционирования. Поставленная цель достигается тем, что манипулятор, содержащий подвижно установленный на опорной плате корпус, револьверную головку со сменными схватами, механизм координатного перемещения поворота этой головки и схватов, и двигатель снабжен профильным кулачком, роликом, смонтированным на опорной плате, и щлицевым валом, связанным с двигателем, при этом на корпусе выполнена цилиндрическая опора, на которой установлен профильный кулачок, взаимодействующий с роликом и щлицевым валом, а механизм координатного перемещения, поворота револьверной головки и схватов расположен в корпусе с возможностью поочередного взаимодействия со шлицевым валом двигателя. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - механизм координатного перемещения; на фиг. 3 - механизм координатного перемещения и блок управления. Манипулятор содержит корпус 1, на котором закреплены револьверная головка 2 со сменными схватами 3 и двигатель 4. Корпус 1 манипулятора установлен на опорной плате 5 подвижного элемента 6 линейного шагового двигателя. Пассивный индуктор линейного двигателя выполнен в виде основания 7 с нанесенной на нем координатной сеткой. Линейный щаговый двигатель обеспечивает движение манипулятора по координатам X и Y. Движение по координате Z, поворот схватов на необходимый угол и смена схватов осуществляется от двигателя 4. На валу 8 двигателя 4 жестко закреплен шлицевой вал 9. Соосно с валом 9 на корпусе 1 выполнена цилиндрическая опора 10. На опоре 10 смонтирован кулачок 11 с возможностью смещения вдоль нее. Наружнаая поверхность кулачка 11 выполнена по спирали Архимеда (приращение равно дискрету перемещения по координате Z), а внутренняя снабжена щлицами. При смещении кулачка 11 вдоль опоры 10 его щлицы входят в зацепление со щлицами вала 9, а наружная поверхность катится по опорному ролику 12, который смонтирован на опорной плате 5. Вал 13 привода схватов также установлен в корпусе 1 и снабжен щлицами с возможностью взаимодействия со щлицевой разъемной муфтой 14, и посредством нее со щлицами вала 9. Вал 15 револьверной головки 2 выполнен в виде трубы, соосной с валом 13 привода схватов и снабженной щлицами с возможностью взаимодействия с муфтой 14 и щлицами вала 9. Корпус 1 подвижно установлен в линейных направляющих 16 опорной платы 5. Управление муфтой 14 и кулачком 11 осуществляется посредством электромагнитов 17 и вилок 18, оснащенных подщипниками. Манипулятор работает следующим образом. Включается линеЯный шаговый двигатель и подвижный элемент б перемещает револьверную головку 2 со схватами 3 на позицию загрузки, обеспечивая смещение по координатам X и Y. На позиции загрузки происходит выбор нужного схвата путем поворота револьверной головки 2. Для этого включается электромагнит 17 и муфта 14 сдвигается до зацепления со щлицами вала 9. Таким образом, вал 15 соединяется с валом 8 двигателя 4 посредством щлицевого вала 9, и револьверная головка 2 поворачивается. Далее опускается схват (смещение по координате Z). Для этого включается следующий электромагнит 17, и кулачок 11 смещается по цилиндрической опоре 10 до зацепления шлицами со щлицевым валом 9. Кулачок 11 осуществляет вращение и одновременно обкатывается по ролику 12. Благодаря определенному профилю кулачка 11 корпус 1 и схваты 3 опускаются по координате Z в заданное положение. После захвата детали корпус 1 поднимается, так как осуществляется реверс двигателя 4. Затем электромагнит 17 выключается, щлицы кулачка 11 разъединяются от шлицев шлицевого вала 9 и кулачок возвращается в исходное положение. После захвата детали манипулятор осуществляет ее доставку на позицию установки. При необходимости ориентации детали схват поворачивается на необходимый угол. Для этого электромагнитом 17 муфта 14 смещается до зацепления со шлицевым ва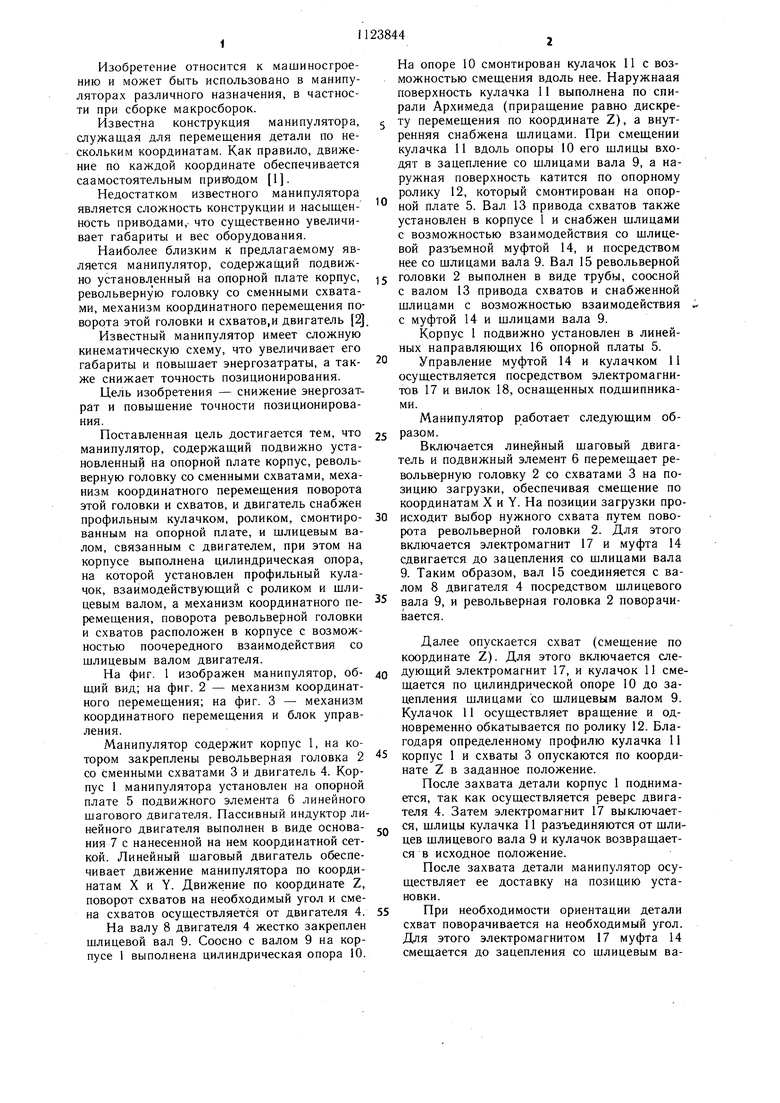
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1593944A1 |
| Манипулятор | 1986 |
|
SU1371897A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| СТАНОК-АВТОМАТ ДЛЯ НАПЛАВКИ ПОЯСКОВ ПА ТРУБНЫЕЗАГОТОВКИ | 1968 |
|
SU231687A1 |
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Автооператор для металлорежущих станков | 1977 |
|
SU691274A1 |
| Суппорт токарно-револьверного станка | 1973 |
|
SU503641A1 |
| Станок для хонингования шлицевых отверстий | 1972 |
|
SU484974A1 |
| Трехкоординатная измерительная головка | 1977 |
|
SU750252A1 |
| Нажимное устройство клети прокатного стана | 1978 |
|
SU766686A1 |
МАНИПУЛЯТОР, содержащий подвижно установленный на опорной плате корпус, револьверную головку со сменными схватами, механизм координатного перемещения, поворота этой головки и схватов, и двигатель, отличающийся тем, что, с целью снижения энергозатрат и повыщения точности позиционирования, он снабжен профильным кулачком, роликом, смонтированным на опорной плате, и щлицевым валом, связанным с двигателем, при этом на корпусе выполнена цилиндрическая опора, на которой установлен профильный кулачок, взаимодействующий с роликом и шлицевым валом, а механизм координатного перемещения, поворота револьверной головки и схватов расположен в корпусе с возможностью поочередного взаимодействия со шлицевым валом двигателя. сл 1чЭ со оо 4 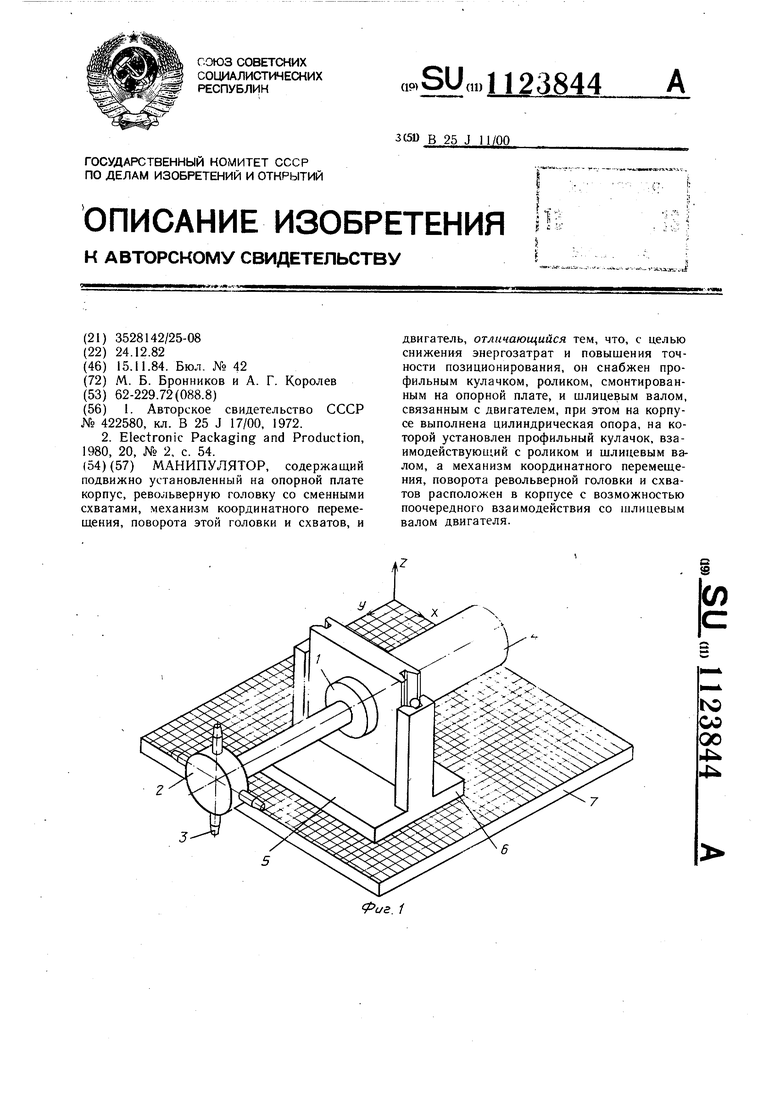
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРАВ П ТБ | 1972 |
|
SU422580A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Electronic Packaging and Production, 1980, 20, № 2, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
