ел to
О) О5
to
N
(риг.Изобретение относится к устройствам для упаковывания в бумагу кольцевых изделий, преимущественно подшип 1иков, и может быть использовано в машиностроительной промышленности.
Цель изобретения - повышение надежности устройства в работе.
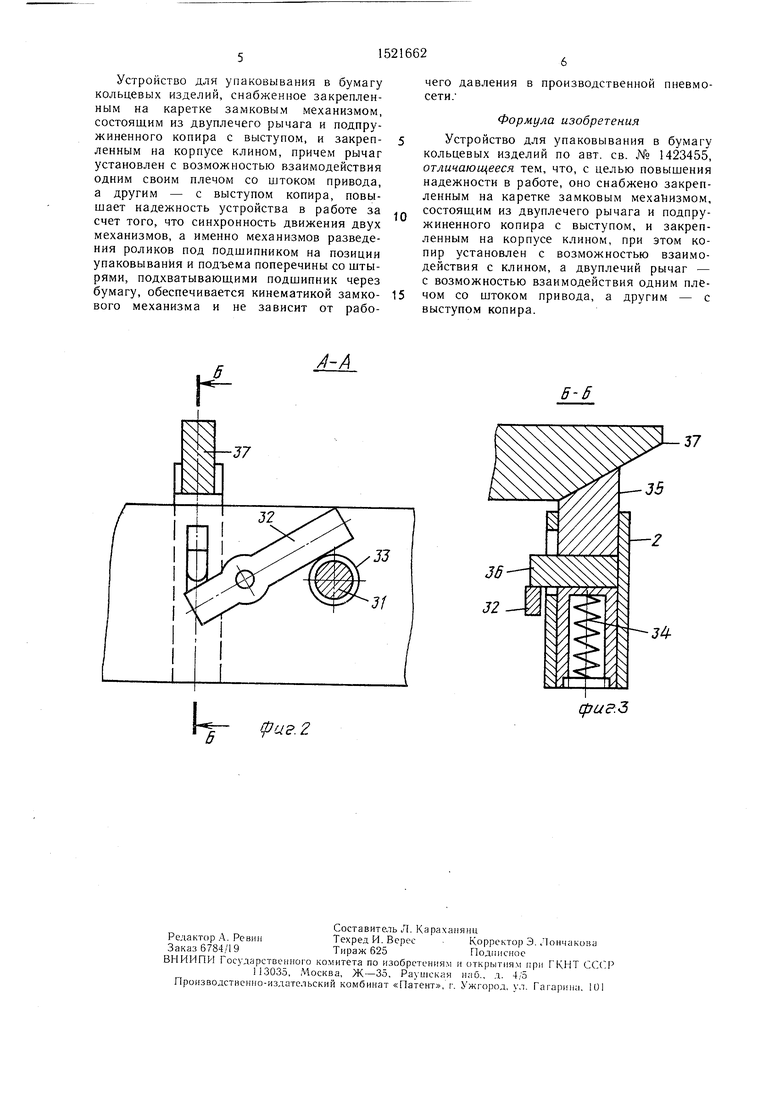
На фиг. 1 изображена, кинематическая схема предлагаемого устройства; на фиг. 2 - замковый механизм (разрез А-А на фиг. 1); на фиг. 3 - разрез Б-Б на фиг. 2.
Устройство для упаковывания в бумагу кольцевых изделий (подшипников) 1 содержит механизм подачи подшипников 1, вклю- чающий каретку 2 с направляющей 3, привод 4 со штоком 5, рольганг 6 и за- крепленные на каретке 2 толкатель 7 для взаимОха,ействия с подшипником 1 и роликом 8 для взаимодействия через копир- ное плечо 9 с упором 10, механизм подачи уггаковочного материала (не показан). механизм заворачивания, состоящий из пуансона 11 с при-водом 12, матрицы 13 и заворачивателя, поперечину 14 со штырями 15, установленную в направляющих 16 соосно матрице 13, и приводом 17, связанным через шток 18 с поперечиной 14 посредством гибкого элемента 19, переброшенного через щкив 20, пару роликов 21 с механизмом их разведения, кинематически связанных с механизмом подачи подщипни- ков 1 и установленных над матрицей 13 симметрично ее оси, при этом механизм разведения роликов 21 состоит из пары установленных в направляющих 22 ползунов 23 и 24, связанных между собой гибким элементом 25, отгибающим шкив 26. Ползун 23 подпружинен пружиной 27, а ползун 24 кинематически связан тягой 28 с механизмом подачи подшипников 1. Поршневая полость привода 17 связана с атмосферой, а штоковая (гидравлическая) полость привода 17 связана через подпиточный аккумулятор 29 с гид- равлической поршневой полостью вспомогательного привода 30 со штоком 31. На каретке 2 устройства смонтирован замковый механизм, включающий двуплечий рычаг 32, отверстие 33, подпружиненный пружиной 34 копир 35 с боковым выступом 36 и закреп- ленный на корпусе клин 37.
В исходном положении поперечина 14 со щтырями 15 находится внизу, поршень цилиндра 17 сдвинут вправо и, следовательно, вся рабочая жидкость вытеснена в поршневую полость пневмогидравлического цилиндра (привода) 30, а его шток 31 выдвинут вправо.
Устройство работает следующим образом. Подшипник 1 по рольгангу 6 транспортируется в исходное положение. При по - даче сжатого воздуха в поршневую полость привода (цилиндра) 4 шток 5 перемещает каретку 2 в направляющих 3 вправо, ролик 8 каретки 2 наезжает на ко
Q
5 0 5 0 -
5
0
5
0
пирное плечо 9 рычага и убирает перед подшипником 1 упор 10, а толкатель 7 подхватывает подшипник 1 и перемешает его из исходного положения на позицию упаковывания. Когда подшипник 1 минует упор 10, ролик 8 проедет копирное плечо рычага 9 и упор 10 снова опустится перед следующим подшипником 1, отсекая его от предыдущего. Вместе с кареткой 2 вправо перемещается тяга 28, в резул ь- тате чего ползуны 23 и 24 под действием пружины 27 сближаются, перемещая разводные ролики 21 к центру позиции упаковывания. После того, как ролики 21 займут положение над матрицей 13, ползуны останавливаются, а каретка 2 продолжает перемещать подшипник 1 на позицию упаковывания до ограничителя (не показан), обеспечивающего соосность подшипника 1 и матрицы 13, при этом каретка 2 уходит дальше выдвинутого штока 31 и двуплечий рычаг 32 под действием собственного веса поворачивается и закрывает отверстие 33 в каретке 2. Затем энергоноситель одновременно подается в штоко- вые полости цилиндров (приводов) 4 и 30. Так как шток 5 цилиндра 4 движется вхолостую, а шток 31 цилиндра 30 совершает работу - поднимает поперечину 14 со штырями 15 вверх, то движение штока 31 происходит медленнее, чем штока 5, поэтому каретка 2 рычагом 32 наезжает сначала на торец штока 31, а затем они продолжают совместное движение до тех пор, пока копир 35, перемещаясь в направляющем пазу каретки 2, своей копирной поверхностью не наедет на клин 37. в результате чего каретка 2 останавливается, а шток 31 продолжает свое движение, освобождая рычаг 32, который отводится в сторону под действием бокового выступа 36 на копире 35, после чего каретка 2 и шток 31 заканчивают совместное движение. В этой завершающей стадии движения каретки 2 .и штока 31 тяги 28 разводят ролики 21 под подшипником 1 в стороны от оси матрицы 13, а штыри 15 поднимаются вверх и подхватывают подшипник 1 через бумагу. Затем энергоноситель отключают от цилиндра 30 и подают в поршневую полость цилиндра (привода) 12, в результате чего пуансон 11 опускает подшипник 1 вместе с бумагой в матрицу 13. Поперечина 14 опускается вниз, шток 18 движется вправо, рабочая жидкость из цилиндра (привода) 17 вытесняется в поршневую полость цилиндра (привода) 30, шток 31 которого через открытое отверстие 33 в каретке 2 выдвигается вправо. , На завершающей стадии упаковывания происходит формование обертки, заделка концов, бумаги во внутреннее кольцо подшипника и удаление упакованного подшипника из машины (эти механизмы на чертеже не показаны). Затем цикл повторяется.
Устройство для упаковывания в бумагу кольцевых изделий, снабженное закрепленным на каретке замковым механизмом, состоящим из двуплечего рычага и подпружиненного копира с выступом, и закрепленным на корпусе клином, причем рычаг установлен с возможностью взаимодействия одним своим плечом со штоком привода, а другим - с выступом копира, повышает надежность устройства в работе за счет того, что синхронность движения двух механизмов, а именно механизмов разведения роликов под подшипником на позиции упаковывания и подъема поперечины со штырями, подхватывающими подшипник через бумагу, обеспечивается кинематикой замко- вого механизма и не зависит от рабо
5
0
чего давления в производственной пневмо- сети.
Формула изобретения
Устройство для упаковывания в бумагу кольцевых изделий по авт. св. № 1423455, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено закрепленным на каретке замковым механизмом, состоящим из двуплечего рычага и подпружиненного копира с выступом, и закрепленным на корпусе клином, при этом копир установлен с возможностью взаимодействия с клином, а двуплечий рычаг - с возможностью взаимодействия одним плечом со штоком привода, а другим - с выступом копира.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для упаковывания в бумагу кольцевых изделий | 1986 |
|
SU1423455A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Устройство для упаковывания кольцевых изделий | 1988 |
|
SU1588644A1 |
| Устройство для завертывания кольцевых изделий | 1990 |
|
SU1747319A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Установка для сварки сильфонов | 1980 |
|
SU1009680A1 |
| ЛЕНТОЧНО-ОТРЕЗНОЙ СТАНОК___.4,J | 1971 |
|
SU308823A1 |
| Устройство для маркировки изделий | 1984 |
|
SU1348221A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Установка для прессования,съема и загрузки изделий на конвейер | 1984 |
|
SU1238969A1 |
Изобретение относится к устройствам для упаковывания в бумагу кольцевых изделий, преимущественно подшипников, и может быть использовано в машиностроительной промышленности. Целью изобретения является повышение надежности в работе. Изделие (подшипник) 1 по рольгангу 6 транспортируется с помощью закрепленного на каретке толкателя 7 на позицию упаковывания и подхватывается разводными роликами 21. Так как каретка перемещается несколько дальше штока 31, то рычаг замкового механизма сходит с конца штока 31 и перекрывает отверстие 33 в каретке. При подъеме поперечины 14 со штырями 15 последние захватывают упаковочную бумагу с подшипником и осуществляют протягивание вниз сквозь матрицу 13 для обертывания изделия 1. При движении каретки в исходное положение рычаг отводит шток 31 привода 30 совместно с кареткой. В крайнем левом положении копир 35 набегает на клин 37 и отводит рычаг в сторону. Надежность в работе повышается за счет того, что замковый механизм кинематически обеспечивает синхронность работы механизмов разведения роликов под подшипниками на позиции упаковывания и подъема поперечины со штырями, подхватывающими подшипник через бумагу. 3 ил.
/1-А
. 2
5-6
-
дзиг:5
| Устройство для упаковывания в бумагу кольцевых изделий | 1986 |
|
SU1423455A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
