(54) МНОГОКООРДИНАТНЫЙ ЦИФЮЮЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный цифровой интерполятор | 2017 |
|
RU2667658C1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Интерполятор | 1983 |
|
SU1108395A1 |
| Цифровой адаптивный линейный интерполятор | 1982 |
|
SU1095189A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
.
Изобретение относится к технике автоматизированного управления производственными процессами, а именно к устройствам для кспользоваиня в снётемах числового.нрограм много управления станками, i Известно устройство многокоордннатной интерполяции, работающее по методу вычисг леиня оценочных функций и содержащее блок задания скорости, интерполяционные блоки (но числу координат), счетчик и логический узел для (шределения конца интерто лнрования и обЩ1 блок управления 1. Шдостатком этого устройства является необходамость 1и |деления параметра на каждом участке интерполирования, трудность стабилизации 1сонту1той скорости, высокая сложность алгоритма при программной реализации.
Наиболее близким техническим рещением к предлагаемому является устройство многокоордннатной интерполяции, содержащее блок задания скорости, блок двухкоординатной интерполяции (на единнцу меньше числа координат), два счетчика и схему совпадення
для определения конца интерполирования, причем выходы пертого интерполяционного блока связаны со входами даух последних блоков интерполящш и счетчиками выходы которых соединены со входами схеигпа совпадешш, а вход первого блока интерполяции соеда {еи с выходом блока задания скорости 2.
Однако это устройство характеризуется зависимоспю cx filHoro построения от числа
10 управляемых координат, необходимостью цолучения в качестве исходных данных суммарных щщращений по нескольким координатам, а также разбивки координат на группы, наnspoie двух счегшков приращеннй.
IS
Цель изо тения - упрощение устройства при интерполяции по п координатам.
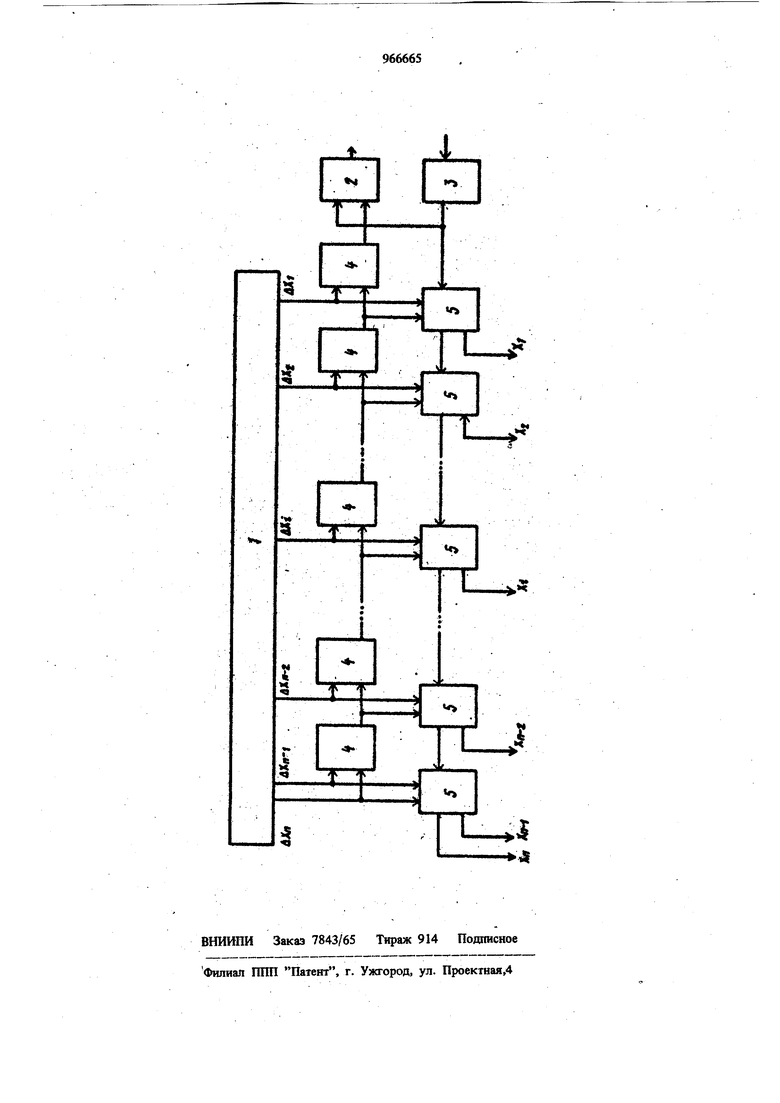
Псктавленная цель достнгается тем, гго многокоордннатный .цифровой интерполятор, jg содержащий блок програкош и счетчик приращений, счетным входом соединенный с выходом блока задания скоросга, содержит п-1 одаоразрядных сумматоров и п-1 блоков двухкоординатной ннте1Я1оляции, причем 3 каждый i-й одноразрядный сумматор соединен первым входом с выходом i-й координаты блока программы и входом первой координаты i-ro блока двухкоординатной ин терполяции, вторым входом - с входом ВТО рой координаты каждого i-ro блока двухкоординатной интерполяции и выходом (i+l) одноразрядного с)т«матора, при этом выход первого одноразрядного сумматора соединен с yctaHOB04HbiM входом счетчика приращений а второй вход (n-l)-ro одноразрядного сумматора подалючен к вввсоду п-й координаты блока программы, каждый 1-й блок двухкоординатой интерполяции соединен импульс ным входом с выходом второй координаты (i-1)-го блока двухкрординатной интерполяции, а выходом первой коорданаты - с выходом 1-й коорданаты устройства, причем импульсный вход первого блока двухкоординатной интерполяции подключен к выходу блока задания скорости, а выход второй ко ординаты ( блока двухкоординатной интерполяцш - к выходу п-ой координаты устройства. На чертеже представлена схема интерполятора. Интерполятор содержит блок 1 программы счетчик 2 приращений, блок 3 задания скорости, п-1 одноразрядных сзмматоров 4 и п-1 блоков 5 дБухкоордш1атной кнтерполяции. Блоки 5 работают по методу вычисления оценошых функций. Для интерполирования прямой в п-мерном пространстве из программы вводятся величин координатных приращений ДХ;, где i 1, 2, п. Исходными программными данными дня работы блоков интерполяции являются: для первого блока 5 интерполяции - приращение по первой координате и сумма прираще НИИ по остальным координатам AXj; для второго блока 5 интерполяции - приращение по второй координате ДХг и сумма п zH AXj и т.д.; для. последнего блока - isj приращения по координатам АХр, и AXj. В счетчик 2 с вьгхода первого сумматора 4 вводится общая сумма приращений .f-АХ i Система i оценочных функций, реализуемых в устройстве, имеет вид и, Х/. Uj Хг-АУз-Уз-АХ Uj Xj AYj :Un-, Xn.,-AYn-Yn-AXn., где Ui, Uj, . . ., Un - оценочные функщш nn AY 11 ЛХ. -X i-. ) Блок 1 программы вьщает прюграммные данные на сумматоры 4. В счетчике 2 устанавливается сумма 4-AXj приращений по всем координатам, в регистрах первого блока 5 устанавливаются величины AXi, HL-AXj.B регистрах второго блока 5 1 п AXj,2 AXj и т.д., в регистрах (п-1)-го i Ъ- Шока 5 величины АХ„. С пуском интерполятора импульсы блока 3 поступают на вход первого блока 5 и счетчика 2. В первом блоке 5 по знаку функции Uj прог изводится либо посылка импульса на выход первой координаты и первый выход устройства X,{Ui 0) с вычислением нового значения Ui (Ul - DI V AYj), либо посылка импульса на выход второй координаты и на импульсный вход Uj О с вычислением нового значения Ui (u UiAXi). Аналогичные операции происходят и в следующих блоках 5. Таким образом, с каждым тактом работы блока 3 производится выдача сигнала только по одной из координат. Поэтому общее число тактов, необходимых дня отработки участка, равно сумме приращений по всем коор1щнатам, которая будет зафиксирована счетчиком 2. Предлагаемый миогокоордашатный цифровой интерполятор, обеспечивает простоту схемной реализации, универсальность построения, так как наращивание числа координат осуществля-. ется добавлением блока интерполящш и сумматора, простоту программной реализации алгоритма. Формула изобретения Многокоординатный цифровой интерполятор, содержащий блок программы и счетчик приращений, счетным входом соединенный с выходом блока задания скорости, о т Л и чающийся тем, что, с целью упрощения устройства при интерполяции по п-координатам, интерполятор содержит п-1 одноразрядных сумматоров и п-1 блоков ftajfx координатной интерполяции, причем каждый i-й одноразрядный сумматор соединен первым входом с выходом 1-й координаты блока программы и входом первой коордшшты i-ro блока Двухкоординатной интерполяции, вторым входом - с входом второй координаты каждого i-ro блока двухкоординатной интерполяции и выходом (i+l)-ro одноразрядного сумматора, при этом выход первого одноразрядного сумматора соединен с установочным входом счетчика приращений, а второй вход (п-1)-го одноразрядного . сумматора подключен к выходу п-й координаты блока программы, каждый i-й блок двухкоорщшатной интерполящш соединен импульсным входом с выходом второй координаты (|-1)-го блока двухкоординатной интер поляции, а выходом первой координаты - с выходом i-й координаты устройства, причем импульсный вход первого блока двухкоордиНатной интерполяции подключен к выходу блока задания скорости, а выход второй координаты (п-1)-го блока двухкоординатвыходу п-й коорной интерполящш - k динаты устройства. Источники информации, принятые во внимание при экспертизе 1.Способы подготовки программ и интерполяторы для контурных систем числового управления . М., Машиностроение, 1970, с. 57-63. 2.Авто1 ское свидетельство СССР N 451061, кл. G 05 В 19/18, 1974 (прототип).
