1
(21)4379926/27-03 (22)22.02.88
(46) 23.11,89. Бюл. № 43
(71)Могилевское научно-производственное объединение по разработке и производству прогрессивной технологической оснастки, средств механизации и автоматизации ПКТИАМ
(72)С.И, Белоусов, И.Н. Короткая, В.М, Кньппева и Л.М. Соболевская
(53)621.867(088.8)
(56)Авторское свидетельство СССР № 393786, кл. В 65 G 29/00, 1971.
Авторское свидетельство СССР № 882870, кл. В 65 С 29/00, 1980.
(54)КАРУСЕЛЬНЫЙ КОНВЕЙЕР
(57)Изобретение относится к подъемно-транспортному машиностроению и м.б. испяяьзовано в поточно-механизированных линиях цехов машиностроительных заводов. Цель - повышение
надежности путем уменьшения динамических ударов при остановке и обеспечение удобства монтажа. Карусельный конвейер включает ротор, связанный с приврдом. Ротор лежит на опорных роликах своим опорным поясом, выполненным в виде пластин-секторов. Ротор закреплен на валу-опоре, вокруг которой размещены упорные ролики. Конвейер включает механизм точной остановки, который выполнен в виде двух силовых цилиндров (Ц) 16,21, подвижной площадки (П) 19 и рычага () 22. При этом П 19 имеет упор 20 для взаимодействия со штоком Ц 16. На П 19 размещен П 21, который с Р 22 и П 19 соединен посредством шарниров. На Р 22 установлен ролик 23 для взаимодействия с упором, закрепленным на роторе. Для остановки ротора в Ц 21 подается воздух и он поднимает Р 22 с роликом 23. Упор наезжает на ролик 23 и переi
(Л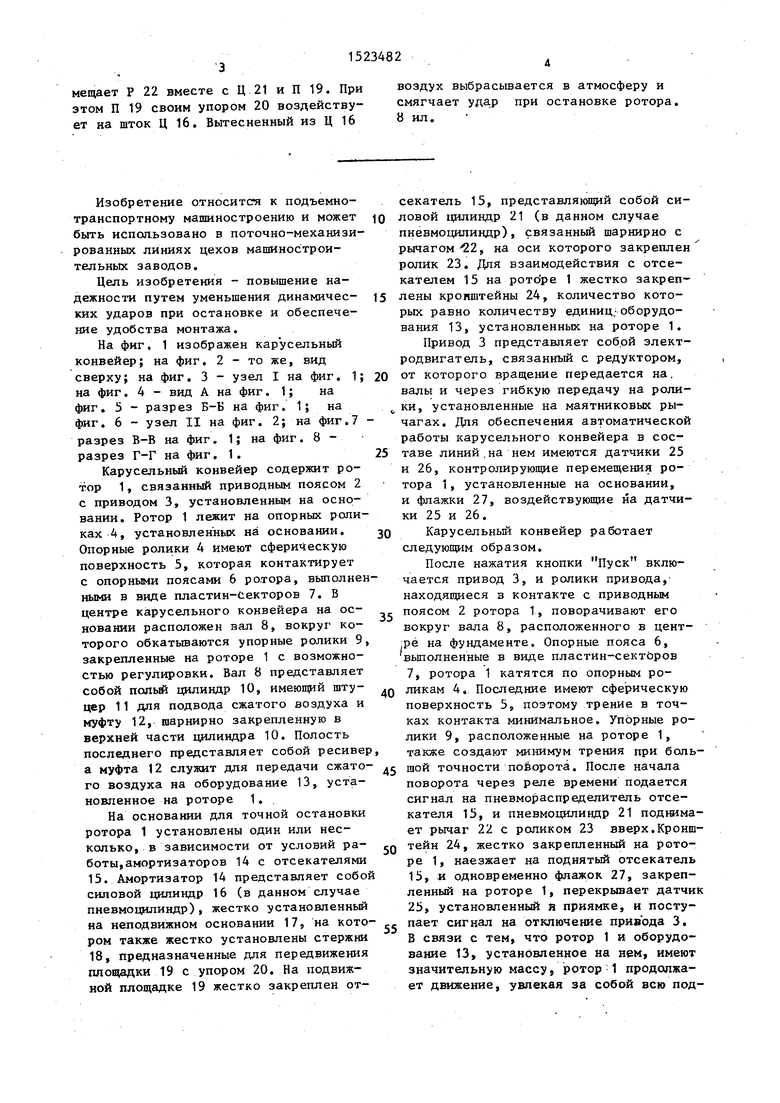
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для остановки и толкания колесных пар | 1990 |
|
SU1801836A1 |
| Установка для сварки сильфонов | 1980 |
|
SU1009680A1 |
| Карусельный конвейер для сборки и сварки узлов машин | 1987 |
|
SU1479389A1 |
| Подвесной грузонесущий конвейер | 1988 |
|
SU1548115A1 |
| УСТРОЙСТВО для КОНТРОЛЯ СКОРОСТИ и ПРОБУКСОВКА ЛЕНТБ! КОНВЕЙЕРА | 1971 |
|
SU316083A1 |
| Формовочный автомат для изготовления литейных полуформ | 1982 |
|
SU1066727A1 |
| Передвижной исчезающий упор | 1980 |
|
SU1069895A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Копер для ударных испытаний | 1979 |
|
SU842441A1 |
| Отопочная машина | 1982 |
|
SU1025672A1 |

Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в поточно-механизированных линиях цехов машиностроительных заводов. Цель - повышение надежности путем уменьшения динамических ударов при остановке и обеспечение удобства монтажа. Карусельный конвейер включает ротор, связанный с приводом. Ротор лежит на опорных роликах своим опорным поясом, выполненным в виде пластин-секторов. Ротор закреплен на валу-опоре, вокруг которой размещены упорные ролики. Конвейер включает механизм точной остановки, который выполнен в виде двух силовых цилиндров (Ц) 16,21, подвижной площадки (П) 19 и рычага (Р) 22. При этом П 19 имеет упор 20 для взаимодействия со штоком Ц 16. На П 19 размещен Ц 21, который с Р 22 и П 19 соединен посредством шарниров. На Р 22 установлен ролик 23 для взаимодействия с упором 24, закрепленным на роторе. Для остановки ротора в Ц 21 подается воздух и он поднимает Р 22 с роликом 23. Упор 24 наезжает на ролик 23 и перемещает Р 22 вместе с Ц 21 и П 19. При этом П 19 своим упором 20 воздействует на шток Ц 16. Вытесненный из Ц 16 воздух выбрасывается в атмосферу и смягчает удар при остановке ротора. 8 ил.
ел
tsD
«
00
tsD
«
мещает Р 22 вместе с Ц 21 и П 19. При этом П 19 своим упором 20 воздействует на шток Ц 16. Вытесненный из Ц 16
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в поточно-механизированных линиях цехов машиностроительных заводов.
Цель изобретения - повышение надежности путем уменьшения динамичес- ких ударов при остановке и обеспечение удобства монтажа.
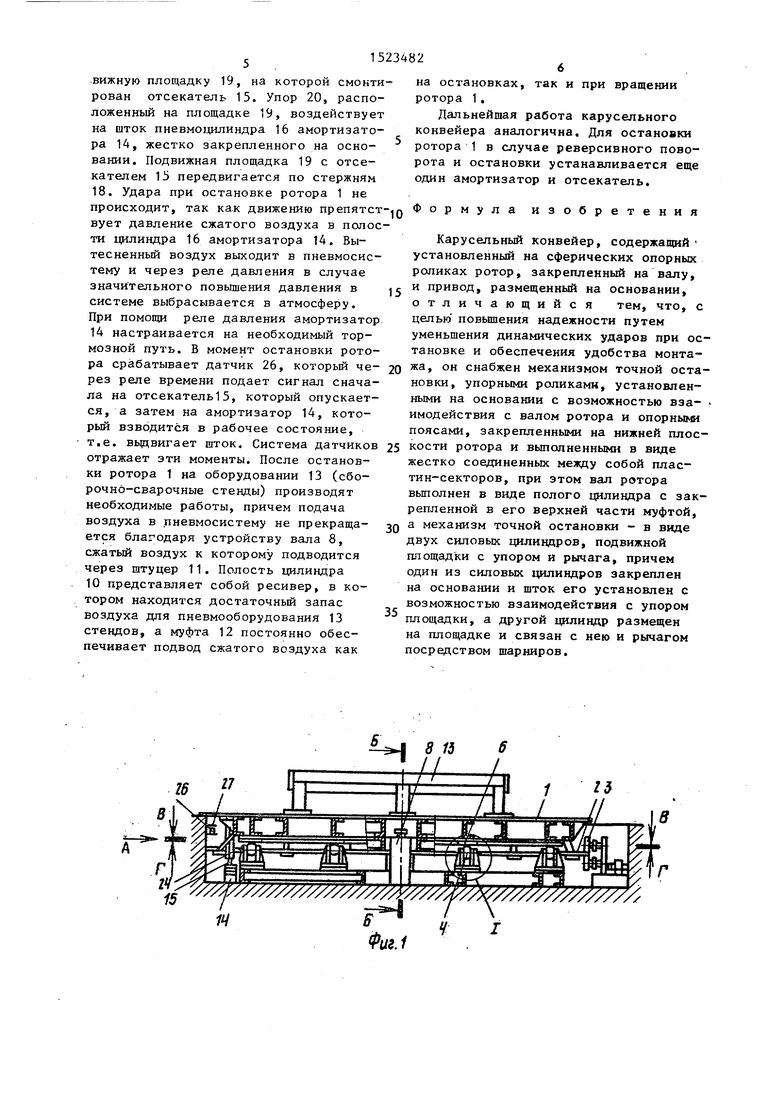
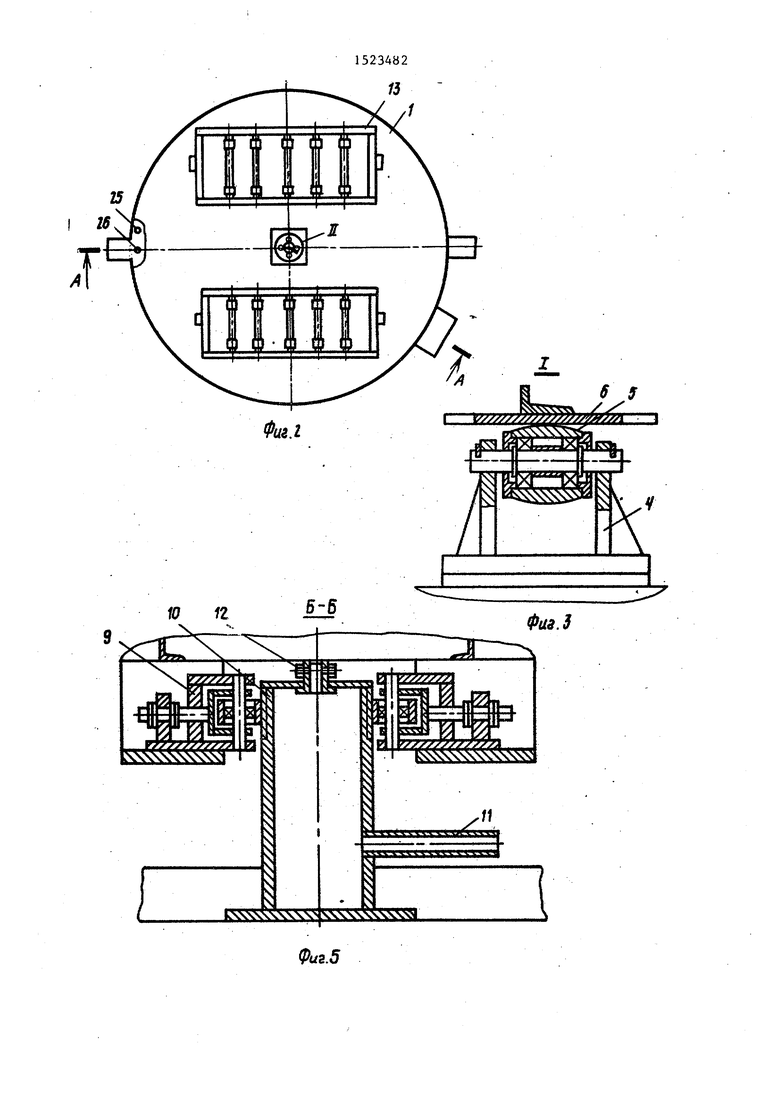
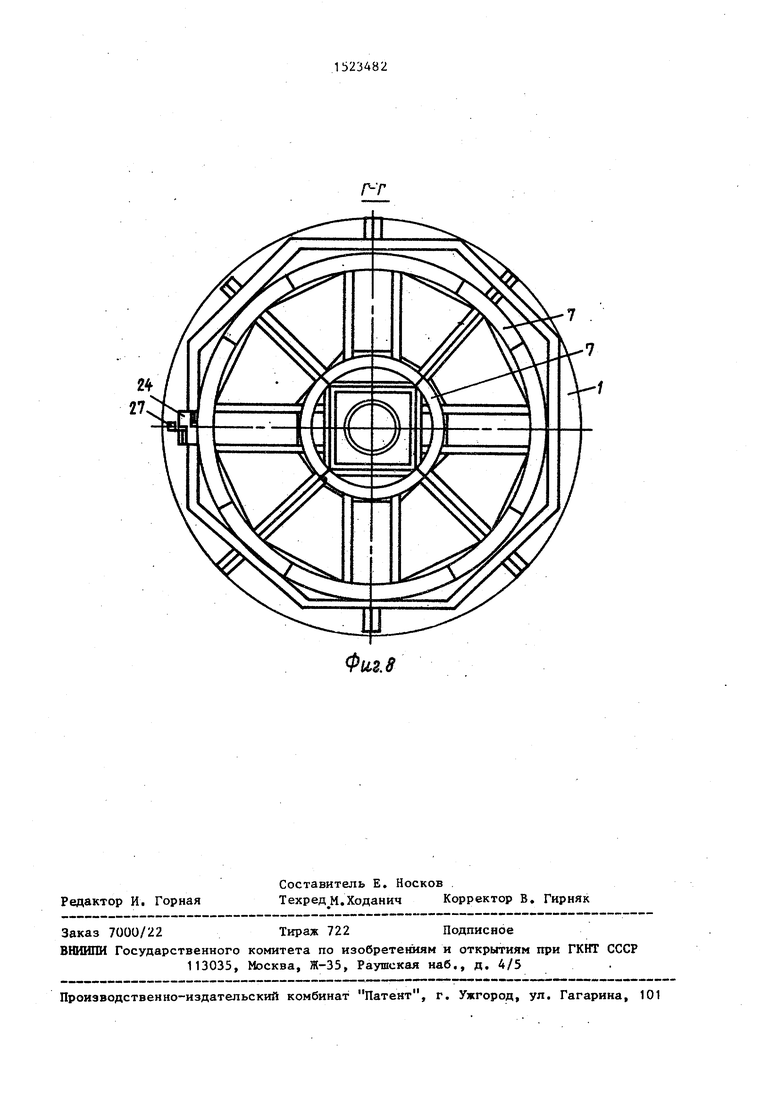
На фиг, 1 изображен карусельный конвейер; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - вид А на фиг. 1; на фиг, 5 - разрез Б-Б на фиг. 1; на фиг. 6 - узел II на фиг. 2; на фиг.7 разрез В-В на фиг. 1; на фиг. 8 - разрез Г-Г на фиг. 1.
Карусельный конвейер содержит ротор 1, связанный приводHbw поясом 2 с приводом 3, установленным на основании. Ротор 1 лежит на опорных роликах 4, установленных на основании. Опорные ролики 4 Имеют сферическую поверхность 5, которая контактирует с опорными поясами 6 ротора, вьтолнен ными в виде пластин-Секторов 7. В центре карусельного конвейера на основании расположен вал 8, вокруг которого обкатываются упорные ролики 9 закрепленные на роторе 1 с возможностью регулировки. Вал 8 представляет собой польй цилиндр 10, имеющий шту- цер 11 для подвода сжатого воздуха и муфту 12, шарнирно закрепленную в верхней части цилиндра 10. Полость последнего представляет собой ресивер а муфта 12 служит для передачи сжато го воздуха на оборудование 13, установленное на роторе 1,
На основании для точной остановки ротора 1 установлены один или несколько, в зависимости от условий ра- боты,амортизаторов 14 с отсекателями 15. Амортизатор 14 представляет собо силовой цилиндр 16 (в данном случае пневмоцилиндр), жестко установленный на неподвижном основании 17, на кото
ром также жестко установлены стержни 18, предназначенные для передвижения площадки 19 с упором 20. На подвижной площадке 19 жестко закреплен отвоздух выбрасывается в атмосферу и смягчает удар при остановке ротора. 8 ил.
5
0 5
0 .г
cQ
5
5
секатель 15, представлякнций собой силовой цилиндр 21 (в данном случае пневмоцилиндр), связанный шарнирно с рычагом-22, на оси которого закреплен ролик 23. Для взаимодействия с отсе- кателем 15 на ротбре 1 жестко закреплены кронштейны 24, количество которых равно количеству единиц;оборудования 13, установленных на роторе 1.
Привод 3 представляет собой электродвигатель, связаннъй с редуктором, от которого вращение передается на. валы и через гибкую передачу на ролики, установленные на маятниковых рычагах. Для обеспечения автоматической работы карусельного конвейера в составе линий , на нем имеются датчики 25 и 26, контролирующие перемещения ротора 1, установленные на основании, и флажки 27, воздействующие на датчики 25 и 26.
Карусельный конвейер работает следующим образом.
После нажатия кнопки Пуск включается привод 3, и ролики привода,- находящиеся в контакте с приводным поясом 2 ротора Т, поворачивают его вокруг вала 8, расположенного в цент- ,рё на фундаменте. Опорные пояса 6, выполненные в виде пластин-сектйров 7, ротора 1 катятся по опорным роликам 4, Последние имеют сферическую поверхность 5,, поэтому трение в точках контакта минимальное. Упорные ролики 9, расположенные на роторе 1, также создают минимум трения при большой точности поборота. После начала поворота через реле времени подается сигнал на пневмораспределитель отсе- кателя 15, и пневмоцилиндр 21 поднимает рычаг 22 с роликом 23 вверх.Кронштейн 24, жестко закрепленный на роторе 1, наезжает на поднятый отсекатель 15, и одновременно флажок 27, закрепленный на роторе 1, перекрывает датчик 25, установленный и приямке, и поступает сигнал на отключение привода 3, В связи с тем, что ротор 1 и оборудование 13, установленное на нем, имеют значительную массу, jpoTop : 1 продолжает движение, увлекая за собой всю подвижную площадку 19, на которой смонтирован отсекатель 15. Упор 20, расположенный на площадке 19, воздействует на шток пневмо1дилиндра 16 амортизатора 14, жестко закрепленного на основании. Подвижная площадка 19 с отсе- кателем 15 передвигается по стержням 18. Удара при остановке ротора 1 не
происходит, так как движению препятст вует давление сжатого воздуха в полости цилиродра 16 амортизатора 14. Вытесненный воздух выходит в пневмосис- тему и через реле давления в случае значительного повьшения давления в системе выбрасывается в атмосферу. При помощи реле давления амортизатор 14 настраивается на необходимый тормозной путь. В момент остановки рото
ра срабатывает датчик 26, которьй че- 20 ° снабжен механизмом точной оста- рез реле времени подает сигнал снача- новки, упорными роликами, установлен- ла на отсекатель15, который опускает- ньми на основании с возможностью вза- ся, а затем на амортизатор 14, кото-имодействия с валом ротора и опорными
рьш взводится в рабочее состояние,поясами, закрепленными на нижней плост.е. вьщвигает шток. Система датчиков 25 кости ротора и выполненными в виде
отражает эти моменты. После остановки ротора 1 на оборудовании 13 (сбо- рочно-сварочные стенды) производят необходимые работы, причем подача воздуха в пневмосистему не прекращается благодаря устройству вала 8, сжатый воздух к которому подводится через штуцер 11. Полость цилиндра 10 представляет собой ресивер, в котором находится достаточный запас воздуха для пневмооборудования 13 стендов, а муфта 12 постоянно обеспечивает подвод сжатого воздуха как
15
.
14
на остановках, так и при вращении ротора 1.
Дальнейшая работа карусельного конвейера аналогична. Для остановки ротора 1 в случае реверсивного поворота и остановки устанавливается еще один амортизатор и отсекатель.
зобретения
Формула и
Карусельный конвейер, содержащий установленный на сферических опорных роликах ротор, закрепленный на валу, и привод, размещенный на основании, отличающийся тем, что, с целью повьщ1ения надежности путем уменьшения динамических ударов при остановке и обеспечения удобства монта0
5
жестко соединенных между собой пластин-секторов, при этом вал ротора вьшолнен в виде полого цилиндра с закрепленной в его верхней части муфтой, а механизм точной остановки - в виде двух силовых цилиндров, подвижной площадки с упором и рычага, причем один из силовых цилиндров закреплен на основании и шток его установлен с возможностью взаимодействия с упором площадки, а другой цилиндр размещен на площадке и связан с нею и рычагом посредством шарниров.
У///У//////////А
Фиг.1
Фиг.I
f
Фиг.5
; i
19
.
6 9
s
a iAjMbd ddBkiibAi«AKi
