ВидА
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовый конвейер | 1983 |
|
SU1126515A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Карусельный конвейер | 1988 |
|
SU1523482A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ | 1991 |
|
RU2009968C1 |
| Устройство для ротационного выдавливания полых изделий | 1977 |
|
SU719751A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
Изобретение относится к подъемно-транспортным механизмам. Цель изобретения - повышение надежности работы. Конвейер включает раму с ходовым путем 1 с каретками 2, связанными тяговым органом 3 и несущими траверсы 9 с кронштейнами. Конвейер снабжен ползуном с роликами, установленными в полой траверсе 9 с возможностью перемещения. Траверса 9 выполнена с отклоненными в сторону рычагами 10, несущими на концах опоры 12 и 13 с захватами 18 для изделий 11. Опоры 12 и 13 установлены с возможностью изменения расстояния между ними, а кронштейн траверсы оснащен роликом, установленным с возможностью взаимодействия с боковым опорным путем. При прохождении криволинейных участков пути ползун с рычагами перемещается внутри траверсы 9, тем самым обеспечивается сокращение расстояния между спаренными каретками 2. Кронштейн траверсы с роликом, который перекатывается по боковому опорному пути, обеспечивает устойчивость траверсы. 1 з.п.ф-лы, 4 ил.
ел
Јъ
00
сл
Изобретение относится к подъемно-транспортным механизмам и может быть использовано для транспортировки и обработки изделий, например, в сварочно-сборочных линиях.
Цель изобретения - повышения надежности и удобства обслуживания.
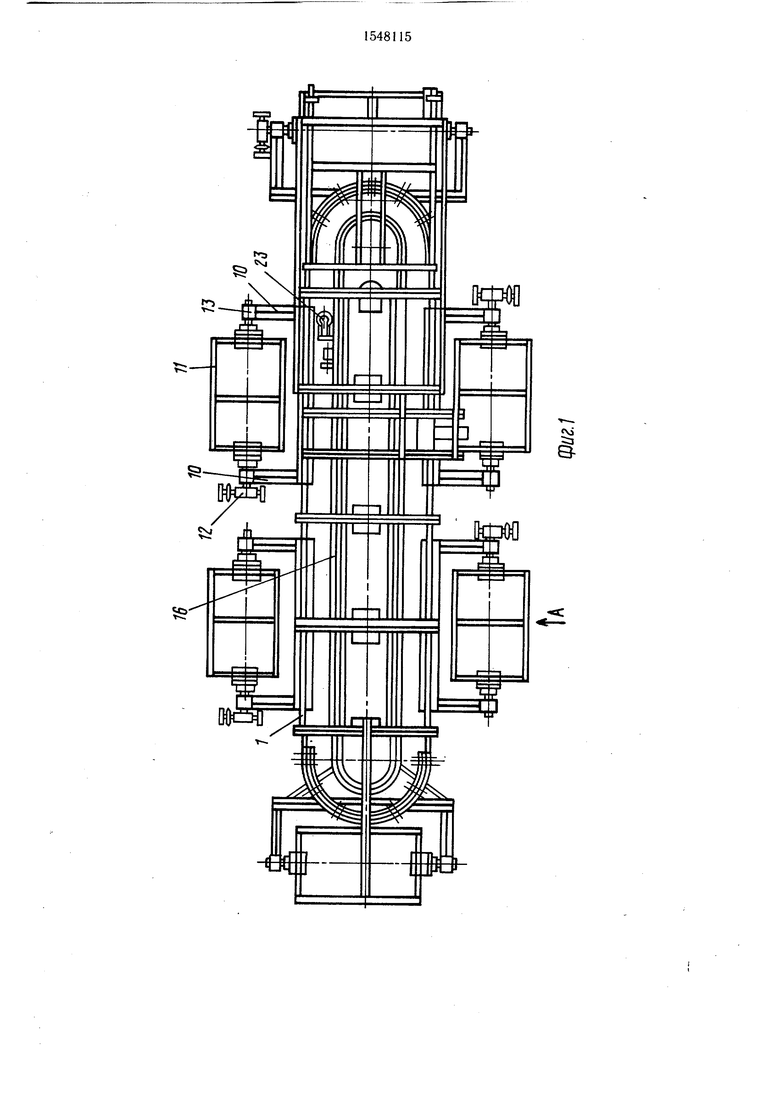
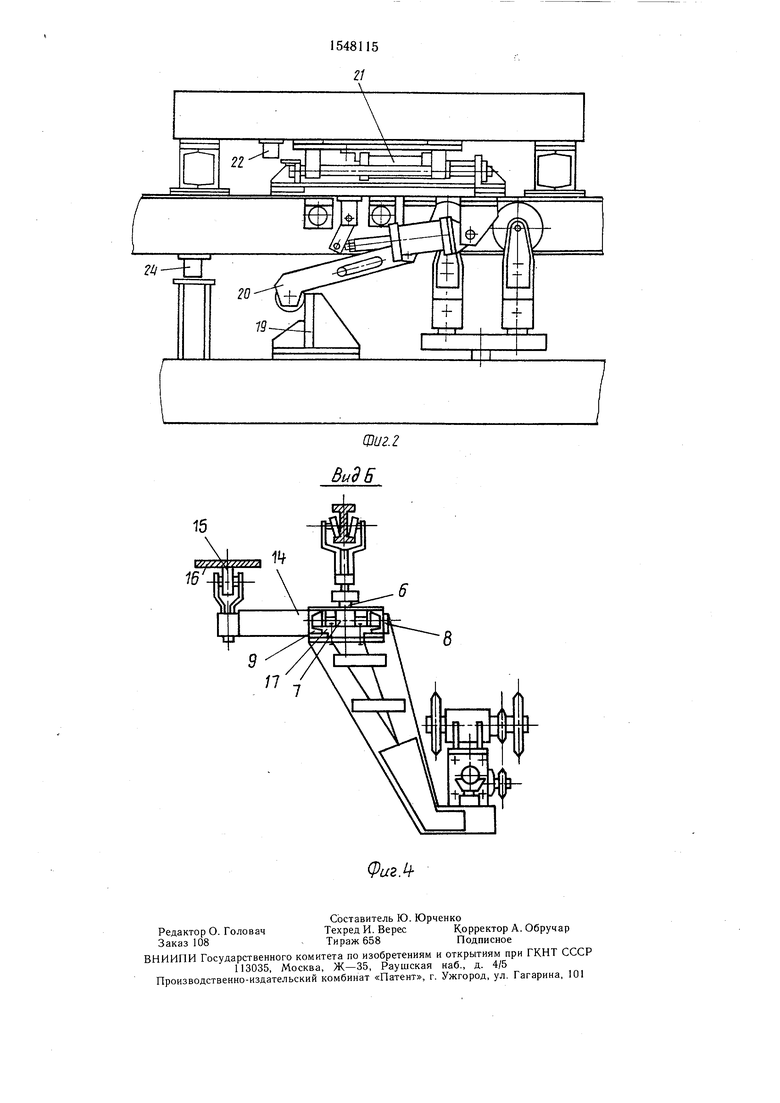
На фиг. 1 показан конвейер, вид сверху; на фиг. 2 - узел остановки; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 3.
Конвейер содержит замкнутый монорельсовый путь 1, несущий каретки 2, связанные цепным тяговым органом 3. Каждая каретка имеет ось 4, на которой шарнирно закрепляют перемычку 5. Перемычка 5 связывает между собой две каретки 4. В перемычке 5 щарнирно закреплен палец 6, на котором подвешен ползун 7 с роликами 8. Ползун 7 с роликами 8 установлен с возможностью перемещения в траверсе 9, которая выполнена в виде сварной металлоконструкции с внутренней полостью. К траверсе 9, под углом к ней, прикреплены рычаги 10, расположенные на траверсе 9 с возможностью перемещения по ней и последующего закрепления в зависимости от габаритного размера транспортируемого изделия 11. На концах рычагов 10 установлены опоры вращения - приводная 12 и опорная 13. Для уравновешивания центра тяжести изделия 11, расположенного за осью монорельса 1, траверса 9 снабжена кронштейном 14 с роликом 15, который упирается снизу в боковой опорный путь 16 жестко прикрепленного к корпусу конвейера. Рычаги 10 прикреплены к траверсе 9 снизу и связаны с пластиной 17, которая имеет возможность перемещаться внутри траверсы 9. К опорам 12 и 13 прикреплены захваты 18 для фиксации изделий 11 во время транспортирования и манипуляции с ними на рабочих местах. Для остановки траверсы 9 на рабочих позициях (выгрузка, загрузка и т.д.) предусмотрен упор 19, который взаимодействует с отсекателем 20, шарнирно соединенный с амортизатором 21. Отсекатель 20 выполнен в виде рычага с роликом на конце. Рычаг приводится в движение силовым цилиндром и фиксируется в двух крайних положениях. Амортизатор 21, связанный с отсекателем 20, предназначен для гашения инерции при остановке траверсы 9. Амортизатор 21 имеет шток (не показан), установленный с возможностью взаимодействия с рычагом отсекателя 20. Работой отсекателя 20 и амортизатора 21 управляет датчик 22. Тяговый орган 3 приводится в движение приводом 23, управление которого осуществляется датчиком 24.
Конвейер работает следующим образом.
На позиции загрузки в захваты 18 устанавливают автооператором (не показан) изделие 11. Одновременно на позиции выгрузки снимают готовое изделие 11 из захватов 18. После этого включается привод 23 и тяговый орган 3 перемещает каретки 2 по монорельсовому пути 1. При этом оси 4 передают поступательное движение на перемычку 5, а палец 6 на ползушку 7 с роликами
8,которые, упираясь в перегородку траверсы
9,перемещают ее вдоль монорельсового пути 1. Одновременно с этим приводится в готовность отсекатель 20. Перемещаясь по моно0 рельсовому пути 1, траверса 9 воздействует на датчик 24, который отключает привод 23, а упор 19 упирается в отсекатель 20. При этом отсекатель 20 воздействует на амортизатор 21 путем вдавливания штока силового цилиндра, чем обеспечивается плавная остановка траверсы 9. Положение отсекателя 20 контролируется датчиком 22. После остановки траверсы 9 производится обработка изделия 11, например, сварка. При этом отсекатель 20 переводится в исQ ходное положение, а шток силового цилиндра амортизатора 21 выдвигается в исходное положение и узел готов к работе. Поворот изделия 11 во время обработки осуществляется при помощи приводной 12 и опорной 13 опор траверсы. Устойчивое
5 положение траверсы в вертикальной плоскости обеспечивается перемещением ролика 15, закрепленного на кронштейне 14, по опорному пути 16. При прохождении криволинейных участков монорельсового пути 1 ползун 7 с роликами 8 перемещается внутри траверсы 9, тем самым, обеспечивая прохождение траверсой криволинейного участка.
Формула изобретения
5 1. Подвесной грузонесущий конвейер, включающий раму конвейера с ходовым путем и соединенные тяговым органом спаренные каретки с траверсой с кронштейном и боковой опорный путь, отличающийся
Q тем, что, с целью повышения надежности работы и удобства обслуживания, он снабжен ползуном с роликом, установленным в каждой траверсе, выполненной полой и с отклоненными во внешнюю сторону рычагами с опорами вращения на концах, при этом
5 опоры вращения установлены с возможностью изменения расстояния между ними, а кронштейн траверсы имеет ролик, установленный с возможностью взаимодействия с боковым опорным путем.
LO
QO rf Ю
/ад
1548115
21
15
| ПОДВЕСНОЙ КАНТОВАТЕЛЬ | 0 |
|
SU219143A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Подвесной грузонесущий конвейер | 1978 |
|
SU724398A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
