(21)4397065/25-08
(22)28.03.88
(46) 07.12.89. Бюл. № 45 (72) Э. М. Царев
(53)621-229.7(088.8) .
(56)Авторское свидетельство СССР № 925846, кл. R 66 С 11/12, 1980.
(54)МАНИПУЛЯТОР
(57)Изобретение относится к подъемно- транспортному машиностроению, в частности к манипуляторам с приводом ве-ртикального перемещения рук, оснащенных гибким тяго- (u.iM элементом, предназначенным для механизации погрузочно-разгру.зочных работ, уста нонки и снятия тяжелых деталей при обслуживании металлорежущих станков, мон- тажно-сборочных работ и т. д. Целью изобретения является повышение надежности в
работе путем обеспечения автоматического управления механизмом подъема. При опускании схвата 6 и касании заготовки 21 поверхности стола 22 гибкий элемент 3 ослабляется, что приводит к перемещению ползуна 10 под действием пружины 12 и перемещению обоймы 8 под действием пружины II. В результате упор 18 нажимает на датчик 20 и привод отключается. При подъеме груза в начальный момент гибкий элемент натягинается, блок 4 перемещается, а также перемещаются обойма 8 и упор 7 вправо Ползун И) остается неподвижным, поскольку жесткости пружин II и 12 неодинаковые ,сли превьииает допустимую, ползун 10 перемеп1ается вправо, упор 17 ползуна воздействует на датчик 19 и привод отключается. ил.
(С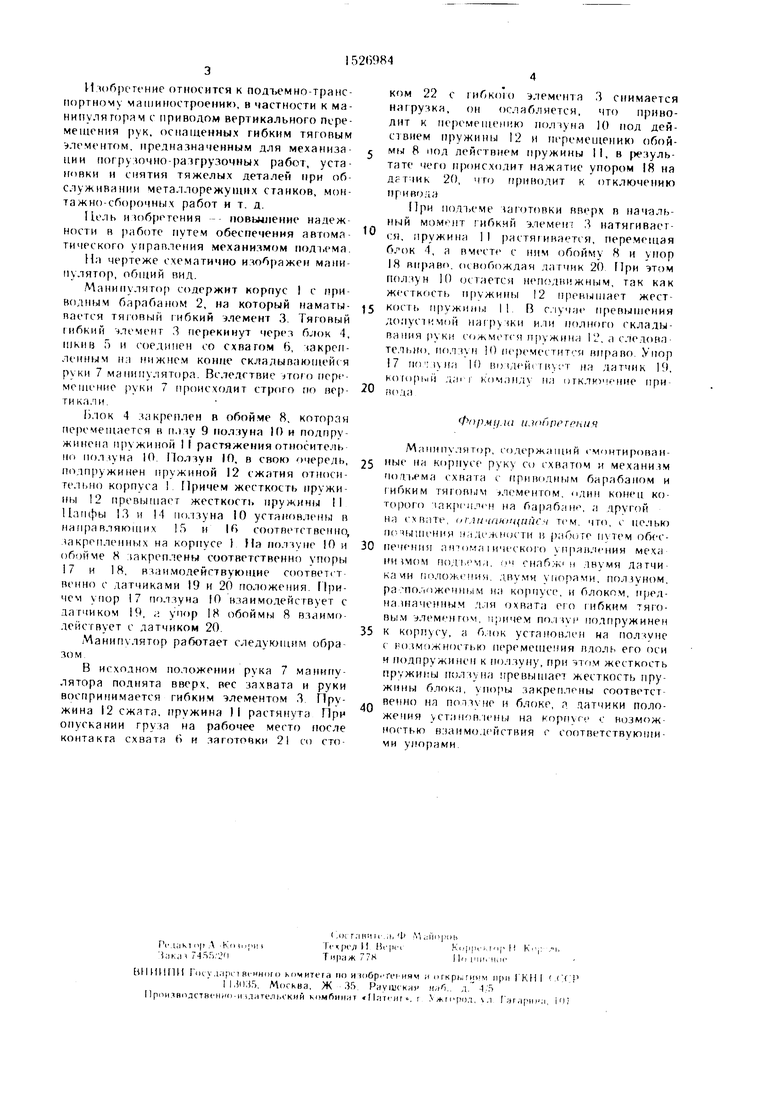
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1425075A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Захватное устройство | 1986 |
|
SU1373567A1 |
| Манипулятор | 1986 |
|
SU1400873A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Манипулятор | 1985 |
|
SU1341017A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Механическая рука манипулятора | 1985 |
|
SU1301695A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к манипуляторам с приводом вертикального перемещения рук, оснащенных гибким тяговым элементом, предназначенным для механизации погрузочно-разгрузочных работ, установки и снятия тяжелых деталей при обслуживании металлорежущих станков, монтажно-сборочных работ и т.д. Целью изобретения является повышение надежности в работе путем обеспечения автоматического управления механизмом подъема. При опускании схвата 6 и касании заготовки 21 поверхности стола 22 гибкий элемент 3 ослабляется, что приводит к перемещению ползуна 10 под действием пружины 12 и перемещению обоймы 8 под действием пружины 11. В результате упор 18 нажимает на датчик 20 и привод отключается. При подъеме груза в начальный момент гибкий элемент натягивается, блок 4 перемещается, а также перемещаются обойма 8 и упор 17 вправо. Ползун 10 остается неподвижным, поскольку жесткости пружин 11 и 12 неодинаковые. Если нагрузка превышает допустимую, ползун 10 перемещается вправо, упор 17 ползуна воздействует на датчик 19 и привод отключается. 1 ил.
Г7 19
(Л
16
ел
tsD
05 со 00
И (обретение относится к под1 емно-транс- портному ма1иииостроению, в частности к ма- нипулягорам с приводом вертикального перемещения рук, оснащенных гибким тяговым : лементом, предназначенным для механизации Г1огру;ючно-разгрузочных работ, установки и снятия тяжелых деталей при обслуживании металлорежущих станков, мон- тажно-сборочных работ и т. д.
Цель ии)бретенин - повьяиение надежности в работе путем обеспечения автоматического управления механизмом подт.ема.
На чертеже схематично изображен манипулятор, общий вид.
Манигилито 1 содержит корпус 1 с приводным барабаном 2, на который наматывается тяговый гибкий элемент 3. Тяговый гибкий члемеит 3 перекинут через блок 4, шкив Г) и соединен со схвагом 6, закрепленным н;1 нижнем конце складывающейся руки 7 манипулятора. Вследствие TOKI перемещение руки 7 происходит строго по ле)- тикали,
)Лок 4 закрертлен в обойме 8, которая перемещается в гызу 9 ползуна И) и подпружинена пружиной II растяжения отиоситель но ползуна 10 Ползун 10, в свою очередь, подпружинен пружиной 12 сжатия относительно корпуса 1 Причем жесткость пружины 12 превышает жесткость пружины II Цапфы 13 и 14 ползуна 10 установлены в нап)авляю1 1нх 15 и 1в соответственно, закрепленных на корпусе 1 На ползуне 10 и обойме 8 закреплены соответственно упоры 17 и 18, взаимодействуюп ие соотвек-т- венно с датчиками 19 и 20 положения. Причем упор 17 ползуна 10 взаимодействует с датчиком 19, ; упор 18 обоймы 8 взаимодействует с датчиком 20.
Манипулятор работает следующим образом,
положении рука 7 манипу- вверх, вес захвата и руки гибким элементом 3 Пружина 12 сжата, пружина II растянута Нри опускании груза на рабочее место после контакта схвата 6 и заготойки 21 со стоВ исходном лятора поднята воспринимается
0
0
5
0
5
0
ком 22 с гибкою элемента 3 снимается нагрузка, он ослабляется, что приводит к перемещению ползуна 10 под действием пружины 12 и перемещению обоймы 8 под действием пружины 11, в )езуль- тате чего происходит нажатие упором 18 на Дгтчик 20, что приводит к отключению 11ривг.).ча
При заготовки вверх в начальный MOMiMiT гибкий племен; 3 натягивается, пружина 1 I растягивается, перемещая б.ок 4, а вместе с ним обойму 8 и упор 18 вправо, освобождая датчик 20 11ри этом ползун 10 (остается неподвижным, так как жесткость п)ужины 12 превышает жесткость пружинь И. В с. |учае ггревышения допустимой нагрузки или полного складывания р ки сожм1 тся п)ужнна 12, i следова- , ползун 10 (1е))еме. тится вправо. Упор 17 nn :i H;i 10 я; 1Лей( на датчик 19, .iii . Ь |1 I команду на игкли рние при- во.
Фпрмцла и 1 Гч1еген11Я
Маннпу.чятор, содержащий смонтированные на корпусе руку со схватом и механизм подьема схвата с гфяводнь1м барабаном и гибким тяговым : лементом. пдин конец которого laKiicii.irH на Г)а|)лбан а другой на cxFHiTe, игли ак цаисч т(м. что, с целью п(-ч 1и1ения надежиисти li работе путем обеспечения ан гомл 1 ического уп|1Я11. 1ения меха ни 1мс)М п();1.г,. м,|. :1 сн, двумя датчика чи . .,вумя угсорами, пол.уном, ра,-положенным на Kopriyce, и блоком, нред- назначенны.м д;|я охвата его гибким тяговым : леменг(м, причем П );1зу| подггружинен к корпусу, а б;1ок установлег) на ползуне с возможностью перемещения вдоль его оси и подпружинен к ползуну, при чтом жесткость пружины ползуна превышает жесткость пружины блока, упоры закреплены соответственно на ползуне и блоке, а .датчики положения установ.тены на Kopfiyre с возможностью .1ействия с соответствукипи- ми упорами.
