NV,« ff ..f ,,,.., WT. ..г ... -с
{риг.1
И I i;i-i ииие относится к машиио Vlj :;l:l:,i )i . Южет быТЬ ИСПОЛЬЗОВЗНО
и npo.iMi:i; i 4Hbix роботах и манипуляторах.
Цель изобретения - повьшгение на- цожности захватывания и удерживания обт.ектоп (преимущественно хрупких, цилиндрической формы),установленных в гноядл.х или ячейках,
При этом допускается значительно большее несовпадение осей захватываемых объектов и захватного устройства, чем в известном устройстве. Кроме того, предлагаемая констру lyiH устройства обеспечивает сохранение положения члхвлченных объектов относител7(1о злхпатного устройства, которое они до захватывания,
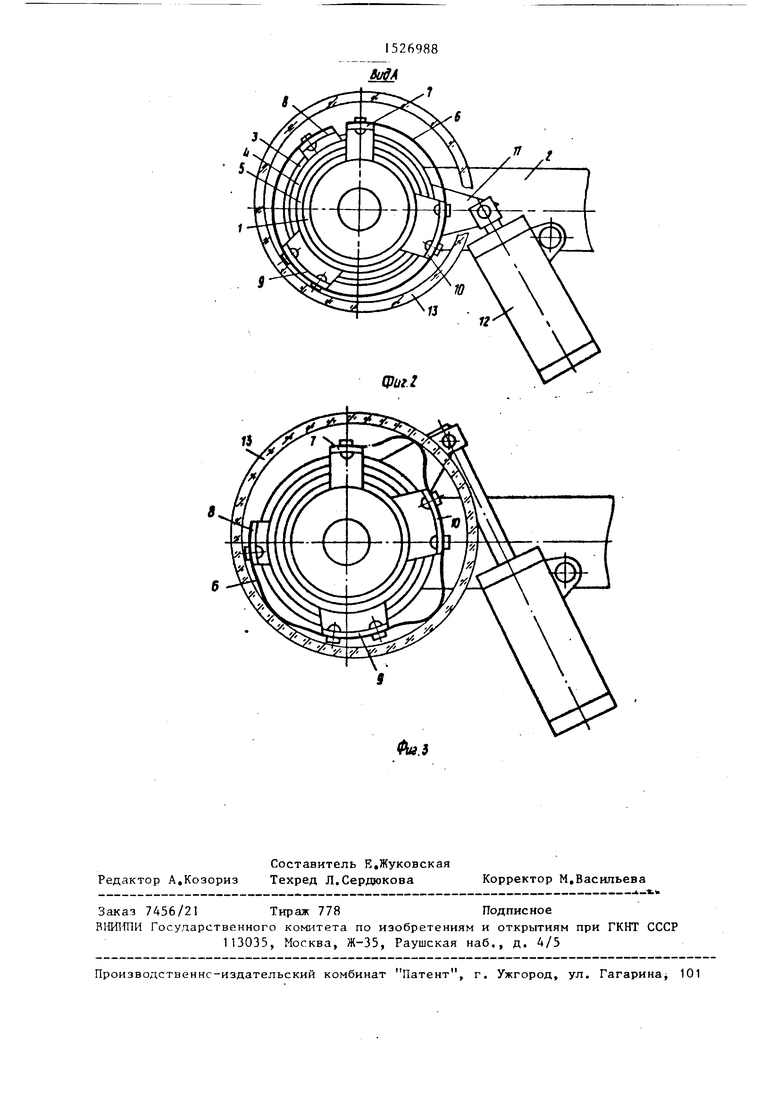
На флг,1 изобр;1жено захватное усгроистпо перед захватыванием цилиндрического стеклянного объекта; на фиг,2 - вид Л на фиг,1; на фиг. 3 захватное устройство после захватывания ofiijCKTa,
Захватное устройство состоит из корпуса , закрепленного хвостовой частью на руке манипулятора 2,новоротного элемента 3, поворотных втулок 4 и 5, установленных концент- pii4HO с поворотным элементом, и упругой гибкой ленты 6 Один конец ленты б закреплен заклейками на лапке 7 корпуса, а другой конец - на лапке 8 поворотного элемента 3, Кроме того лента 6 прикреплена к лапкам 9 и 10 соответственно поворотт- х втулок 4 и 5, Поворотт-га элемент 3 через рыча 11 соединен с приводом 12, выполненным в внде поступательного двигателя
Захватное устройство работает следующим обратом.
Рука MaHHnyjTHTOpa 2 размещает захватное устройство над захватываемым объектом 13, в качестве которого мо- жет быть стеклянный цилиндрический сосуд, установленный в углублении стола. При этом неизбежно вертикальная ось захватного устройства не будет совпадать с осью сосуда, так как любой манипулятор характеризуется определенной погрешностью позиционирования своего рабочего органа,Затем манипулятор перемещает захватное устройство в нолость сосуда, в положа- ние, из которого осуществляется захватывание (фиг. О, Взаимное расположение лапок 8 и 9, 9 и 10, Ш и 7
характеризуется при этом максимальным расстоянием одна относительно другой; упругая лента 6 вытянута в форме незамкнутого кольца (фиг,2), а шток двигателя 12 находится во втянутом состояниио Для захватьшания объекта дается команда на выдвижение штока двигателя 12, В результате этого поворотный элемент 3 совершает вращательное перемещение (против движения часовой стрелки) на некоторый угол. По мере поворота лапки 8 начинают перемещаться лапки 9 и 10 и, соответственно, начинает выгибаться упругая лента 6 на участках между лапками 7 и 10, 10 и 9, 9 и Я, Изгиб ленты на любом участке прекращается, как только она упирается в поверхность объекта 13, Зажатие объекта прекращается, когда лента упирается на всех трех участках (фиг,3)о При этом усилие со стороны ленты на стенку сосуда во всех точках контакта будет одинаковым, а лапки 8, 9 и 10 сместятся в некоторое новое положение. После извлечения сосуда из углубления стола его ось будет сохранять то положение относительно захватного устройства (например, его вертикальной оси), которое бьто в момент захватывания.
Опускание объекта происходит в результате подачи команды на обоатн1.тй ход штока двигателя 12, вследствие
чего поворотный элемент 3 и поворот- втулки 4 и 5 принимают первоначал ьг.ое положение.
Формула изобретения
Захватное устройство, содержащее корпус, поворотный элемент, перемещаемый приводом, и упругий элемент в ленты, закрепленной одним концом на корпусе, а другим - на поворотном элементе, о т л и ч а ю щ е е- с я тем, что, с целью расширения технологических возможиостей за счет обеспечения захвата изделий, расположенных с погрешностью позиционирования относительно изделия и захвата, устройство снабжено по крайней мере одной поворотной втулкой, установленной концентрично с поворотным элементом, а упругий гибкий элемент закреплен в-промежуточных точках на упомянутых поворотных втулках.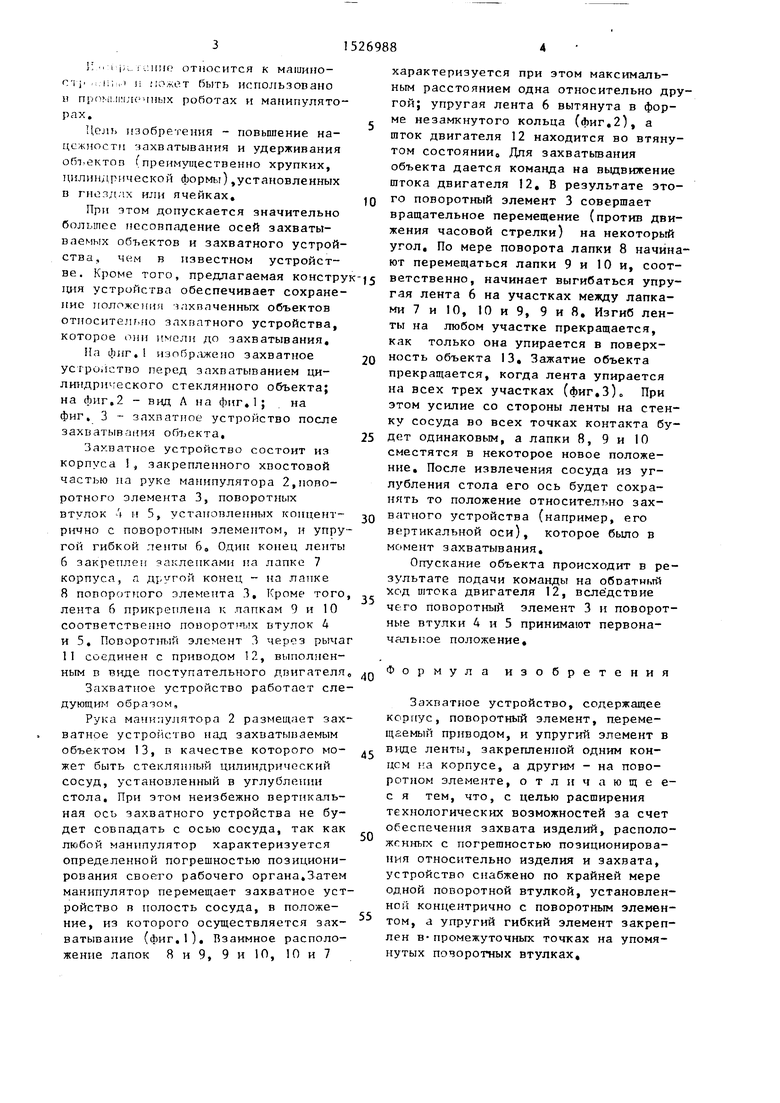
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ЗАХВАТ | 2001 |
|
RU2190519C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| Схват манипулятора | 1986 |
|
SU1390019A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Захватное устройство | 1988 |
|
SU1549748A1 |
| Вакуумное захватное устройство | 1987 |
|
SU1445957A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата изделий, расположенных с погрешностью позиционирования относительно изделия и захвата. Захватное устройство состоит из корпуса 1, поворотного элемента 3, поворотных втулок 4 и 5, установленных концентрично с подвижным элементом, и упругой гибкой ленты 6. Один конец ленты закреплен на корпусе, другой конец - на поворотном элементе, а в нескольких промежуточных точках лента закреплена на поворотных втулках. Поворотный элемент через рычаг соединен с приводом, выполненным в виде поступательного двигателя, а корпус закреплен на руке манипулятора. 3 ил.
