фие.1
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления приводами перемещения тележек с гибким подвесом груза.
Цель изобретения - повышение надежности.
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - структурная схема задатчика скорости.
Устройство содержит задатчик 1 времени разгона тележки, подключенный через задатчик 2 скорости к входу регулятора 3 скорости, подключенного к управляющему входу преобразователя 4, питающего электродвигатель 5 механизма перемещения тележки. Датчик 6 обратной связи по скорости электродвигателя 5 подключен к входу регулятора 3. Задатчик 2 включает в себя апериодический блок 7 и консервативный блок 8, входы которых соединены с задатчиком 1. Выход блока 8 через дифференцирующий блок 9 и усилитель 10 подключен к одному входу сумматора 11. Выход блока 7 соединен с вторым входом сумматора 11. Выход блока 9 через дифференцирующий блок 12 и усилитель 13 подключен к третьему входу сумматора 11. Выход блока 7 через дифференцирующий блок 14 и усилитель 15 подключен к четвертому входу сумматора 11, выход которого соединен с входом регулятора 3 (управляющим входом привода перемещения тележки).
Устройство работает следующим образом.
Сигнал на выходе задатчика 2 пропорционален скорости тележки и равен
1 /1 P- 1 , Ј Г Ј
.Ј(1-Г), Л1+Ј,
-Iлг+ех
X cosAt + (И. - -A).sin At,
где а0 - среднее ускорение тележки;
е - отношение коэффициента линейного сопротивления среды движению грузозахватного органа к массе грузозахватного органа;
/ - время;
Я. - заданная частота вынужденных колебаний грузозахватного органа;
/- длина гибкого подвеса;
g - ускорение силы тяжести.
При разгоне тележки задатчик 2 формирует сигнал, исключающий колебания грузозахватного органа в конце разгона. Время разгона задает задатчик 1.
Формула изобретения
Устройство для управления приводом перемещения тележки с гибким подвесом
0 грузозахватного органа, содержащее задатчик времени разгона тележки, подключенный к входу консервативного блока, выход которого через дифференцирующий блок соединен с одним из входов сумматора, выход которого подсоединен к управляющему входу привода перемещения тележки, отличающееся тем, что, с целью повышения надежности, оно снабжено апериодическим блоком, вход которого подключен к задатчику времени разгона тележки, а выход - к вто0 рому входу сумматора, и дополнительными дифференцирующими блоками, входы которых соединены с выходами соответственно упомянутого первого дифференцирующего блока и апериодического блока, а выходы - соответственно к третьему и четвертому входам сумматора.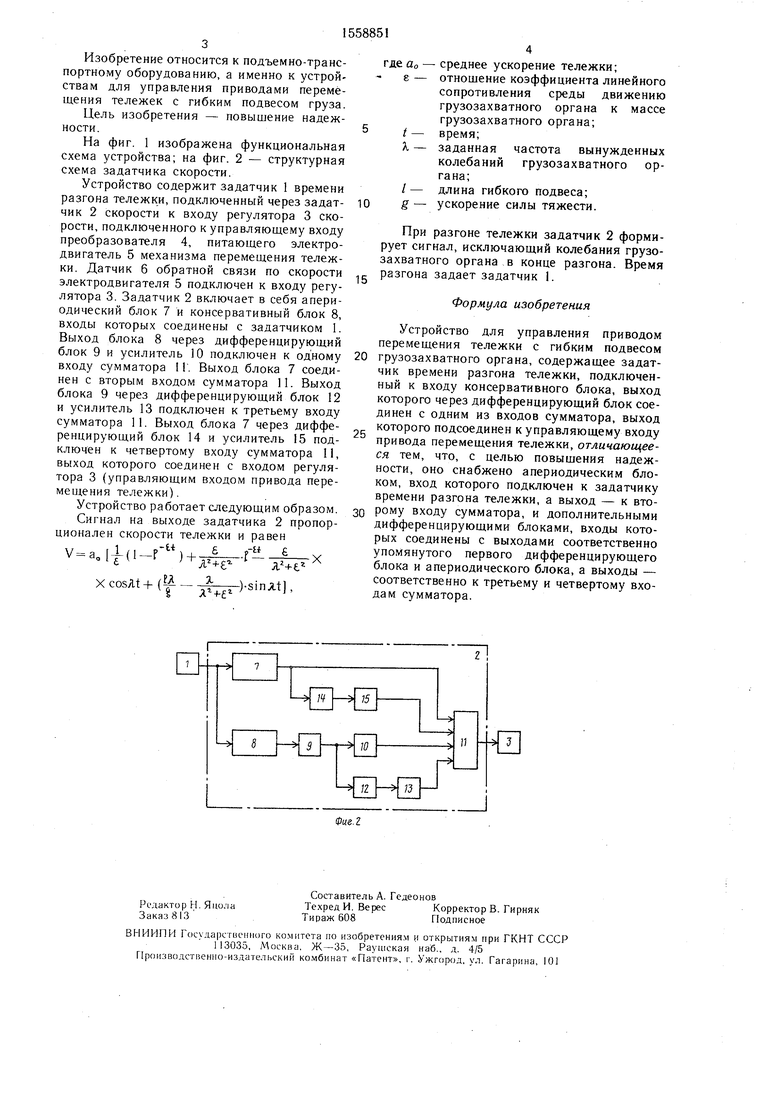
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления приводами перемещения тележек с гибким подвесом грузозахватного органа. Цель изобретения - повышение надежности. Задатчик 1 времени разгона тележки через задатчик 2 скорости подключен к регулятору 3 скорости, управляющему преобразователем 4, питающим электродвигатель 5. Задатчик 2 при разгоне формирует по определенному закону сигнал, соответствующий скорости тележки. 2 ил.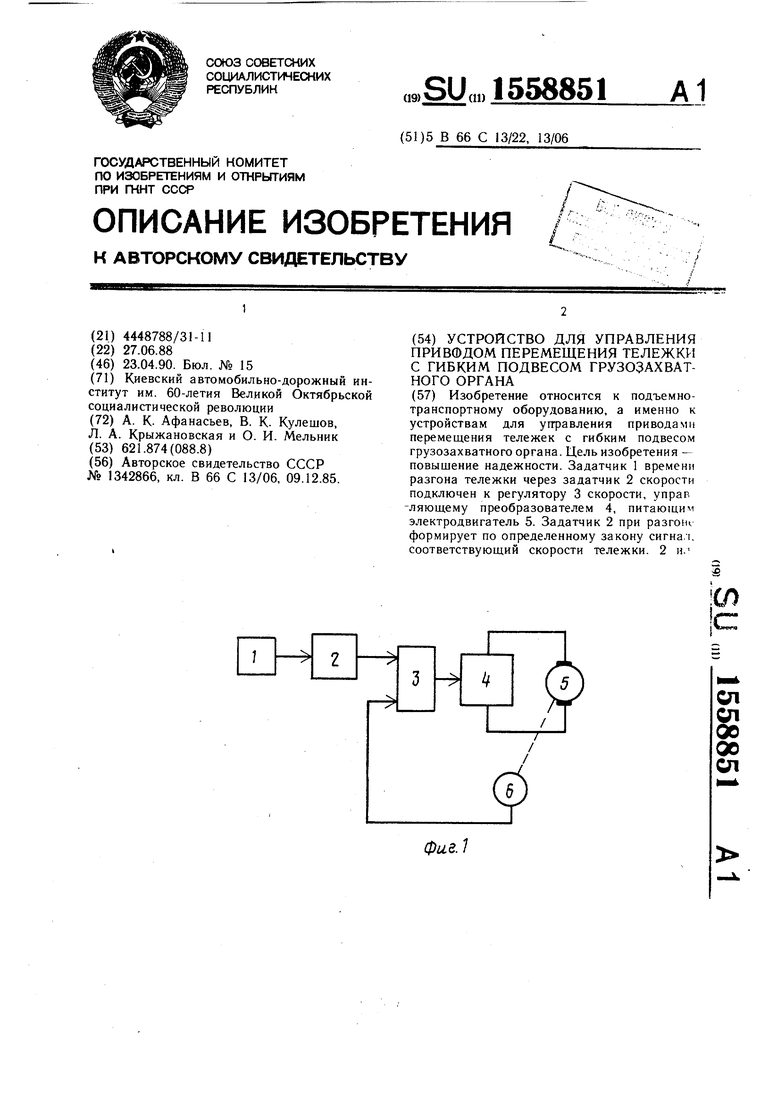
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
