(Л
СП
оо
о оо
N3
Изобретение относится к устройствам для проволоки.
Це.1ь изобретения - повьпиение производительности и качества резки.
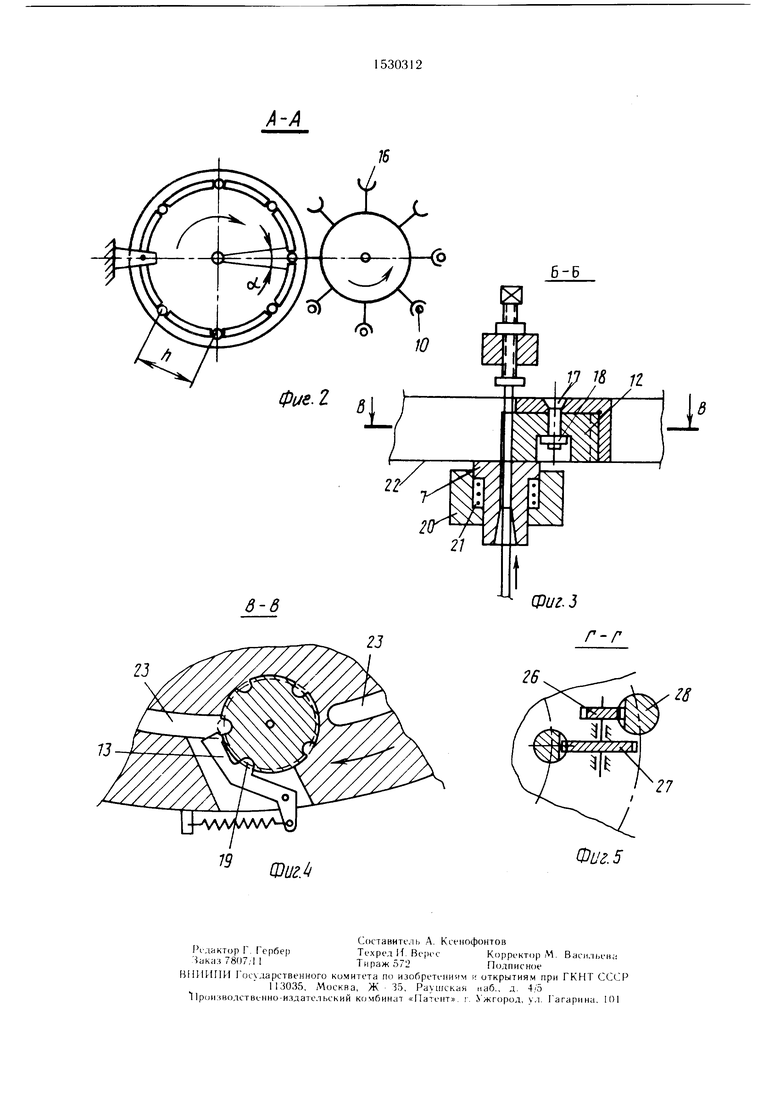
На фиг. 1 с.хе.матично изображен усовершенствованный автомат, обихий вид; на фиг. 2 то же, разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 -- разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 1.
Автомат содержит (фиг. 1) ротор в виде вала 1, на которо.м смонтированы барабан 2 с ириводны.ми ползунами-толкателями 3 и механизмом 4 отрезки, стационарный ме.ха- низм 5 подачи проволоки 6 в виде непрерывно вращаюши.чся роликов, неподвижную отрезную втулку 7 с упором 8 и механизм 9 транспортирования отрезанных заготовок 10.
ЛАеханизм О1резки 4 и граисиортнрова- ния 9 отрезанных заготовок выполнены в виде двух кинематически связанных посредством шестерен 11 многогюзиционных дисков, первый из которых снабжен режу- Н1ИМИ 12 и фижимнымп 13 органами (фиг. 3 и 4), а второй - захватными органами (фиг. 1 и 2) в виде подпружиненных ползунов 14 с опорой 15 и клеп1евыми захватами 16.
Каждый режунхий орган (резец) механизма 4 отрезки, т. е. диска (фиг. 3 и 4) вы- нолнеп цилиндрическим и многолезвийным и закреилепным в глухом гнезде диска 4 посредством винта 17 и гайки 18 с возможностью поворота вокруг своей оси Д-Д. При- жи.мнон орган 13 в виде подпружиненного рычага вьпюлнен с фиксатором 19 режуще- 14) органа, а отрезная втулка 7, смонтированная в корпусе 20, подпружиненная пружиной 21 к торцам резцов 12, находящихся заподлицо с торцом 22 диска 4. Для подачи 11рово,токи до упора 8 в диске 4 между резцами 12 выполнены по окружности сквозные пазы 23. Для создания плавной (без вибрации и рывков) работы автомата его привод 24 снабжен маховиком 25, делающим один оборот за поворот ротора на один tnar h между режущими органами (резцами ), а для ускоре1 ной передачи заготовок из диска 4 в клеп1евые захваты 16 механизма транспортирования (при повышении производительности автомата) ротор снабжен механизмом ускорения (фиг. 5) в виде двух шестерен 26 и 27, из которых малая 26 за- пеплена с зубчатой рейкой приводного ползуна 28, взаимодействующего с кольцевым неподвижным кулачком 29, а большая 27 - - с П(;лзуном-толкателем 3, который имеет скорость движения вдоль оси в 2--3 раза большую, чем приводной ползун 28.
Автомат работает следуюшим образом.
При пуске привода ротор с механизмом 9 транснортирования получают равно-
5
0
5 0
5
0
5
мерное синхронное вращение, также как ролики механизма 5 подачи проволоки, а каждый ползуььтолкатель 3 через механизм ускорения и приводной ползун 28 совершает за каждый оборот ротора одно возвратно- поступательное движение, в основном в секторе а, равном по дуге одному шагу h ротора. Проволока подается через отрезную втулку 7, и каждый паз 23 диска 4 до регулируемого упора 8, при этом отрезная втулка 7 пружиной поджата к торцу 22 диска 4 и торцу каждого резца 12. После отрезки заготовка поджимается подпружиненным рычагом и транспортируегся до сектора а, где ползуном-толкателем 3 пересаживается в клещевой захват 16 механизма 9 транспортирования, в процессе их совместного перемещения в секторе а. За один оборот ротора каждая его позиция выдает одну заготовку, создавая непрерывный поток с высокой производительностью.
При затуплении одного из лезвий резцов (что определяется далее по качеству заготовок визуально или автоматически) автомат останавливается, данный резец поворачивается на один шаг и вновь пускается в работу.
Таким образом, предложенное усовершенствование позволит поднять производительность автомата (за счет сокращения простоев на замену резцов), а также повысить качество заготовок посредством исключения заусенцев в плоскости среза.
Формула изобретения
Отрезной автомат роторного типа, содержащий роликовый механизм подачи проволоки, механизм отрезки, включающий неподвижную режущую втулку, и размещенные на приводном многопознционном диске подвижные режущие и прижимные органы, механизм транспортирования, включающий кинематически связанный с первым диском второй многопозиционный диск с размещенными на нем захватными приспособлення- ми, и механизм передачи заготовки из режущего в транспортирующий механизм, включающий толкатели, отличающийся тем, что, с целью повышения производительности и качества, диск с режущими и прижимными органами снабжен механизмом ускорения толкателей механизма передачи, каждый подвижный режущий орган механизма отрезки выполнен многолезвийным и установлен с возможностью поворота вокруг своей оси, при этом неподвижная режущая втулка подпружинена к диску с подвижными режущими органами, а каждый прижимной орган выполнен в виде подпргужиненного рычага с размещенным на нем фиксатором подвижного режущего органа.
в-6
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Отрезной автомат роторного типа | 1989 |
|
SU1678487A2 |
| ОТРЕЗНОЙ АВТОМАТ РОТОРНОГО ТИПА | 1964 |
|
SU164013A1 |
| Устройство для рубки проволоки на мерные отрезки | 1980 |
|
SU956104A1 |
| Транспортный ротор | 1988 |
|
SU1558810A1 |
| Правильно-отрезной автомат | 1985 |
|
SU1326379A1 |
| Устройство для разделения на отрезки выполненного в виде рукава полотна к мешкоделательной машине | 1979 |
|
SU974932A3 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ из ПРОВОЛОКИ ДЕТАЛЕЙ, ИМЕЮЩИХ ФОРМУ СТЕРЖНЯ С ПРОФИЛЬНЫМ КОНЦОМ | 1971 |
|
SU311692A1 |
| Устройство для удаления деталей из роторной машины | 1982 |
|
SU1050885A1 |
| Устройство для гибки изделий из проволоки и стержней | 1980 |
|
SU997929A1 |
| Устройство для изготовления гвоздей | 1987 |
|
SU1466855A1 |
Изобретение относится к устройствам для резки проволоки и позволяет повысить производительность и качество. Автомат содержит механизм 5 подачи проволоки, отрезную втулку 7, приводные ползуны-толкатели 3, механизмы отрезки и транспортирования, выполненные в виде двух кинематически связанных многопозиционных дисков, первый из которых снабжен режущими и прижимными органами, а второй - захватными приспособлениями. Каждый режущий орган выполнен многолезвийным и установлен с возможностью поворота вокруг своей оси. Каждый прижимной орган выполнен с фиксатором режущего органа, к которому подпружинена втулка 7. 5 ил.
23
13
ФигМ
г-г
27
Фиг. 5
| ОТРЕЗНОЙ АВТОМАТ РОТОРНОГО ТИПА | 0 |
|
SU164013A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
