во состоит из передающего механизма с двумя захватами, вьтолненными в ви де нижних захватов 25 и подпружиненных верхних захватов 19, а также приемного механизма с двумя захватами, выполненными из неподвижных планок 2 и подвижных губок 5. Детали 32 типа игл захватываются верхними 19 и нижними 25 захватами. Затем посредством гидроцилиндра они переводятся в вер
тикальное положение до соприкосновения деталей 32 с внутренними неподвижными планками 2. При этом подвижные губки 5 заранее раскрыты посредством рычагов 12. После этого губки 5 захватывают детали 32. Затем посредством тяг 18 верхние захваты 19 отводятся, освобождая детали 32, а нижние захваты опускаются в горизонтальное положение. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
| Установка для армирования керамических изделий | 1985 |
|
SU1346432A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Автомат для сборки комбинированной петли | 1977 |
|
SU743837A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| МУФТА | 2008 |
|
RU2357128C1 |
| Устройство для подачи длинномерных заготовок в зону обработки | 1988 |
|
SU1590172A2 |

Изобретение относится к загрузочным устройствам для электрохимической обработки деталей типа игл, в частности инъекционных, и может найти применение в медицинской промышленности, а также в приборостроении и станкостроении. Целью изобретения является повышение надежности устройства в работе. Загрузочное устройство состоит из передающего механизма с двумя захватами, выполненными в виде нижних захватов 25 и подпружиненных верхних захватов 19, а также приемного механизма с двумя захватами, выполненными из неподвижных планок 2 и подвижных губок 5. Детали 32 типа игл захватываются верхними 19 и нижними 25 захватами. Затем посредством гидроцилиндра они переводятся в вертикальное положение до соприкосновения деталей 32 с внутренними неподвижными планками 2. При этом подвижные губки 5 заранее раскрыты посредством рычагов 12. После этого губки 5 захватывают детали 32. Затем посредством тяг 18 верхние захваты 19 отводятся, освобождая детали 32, а нижние захваты опускаются в горизонтальное положение. 6 ил.
Изобретение относится к загрузочным устройствам для электрохимической обработки деталей типа игл, в частности инъекционных, и может найти применение в медицинской промышленности, а также в приборостроении и станкостроении.
Целью изобретения является повышение надежности устройства в работе при подаче деталей типа игл за счет исключения выпадания деталей из передающего.механизма.
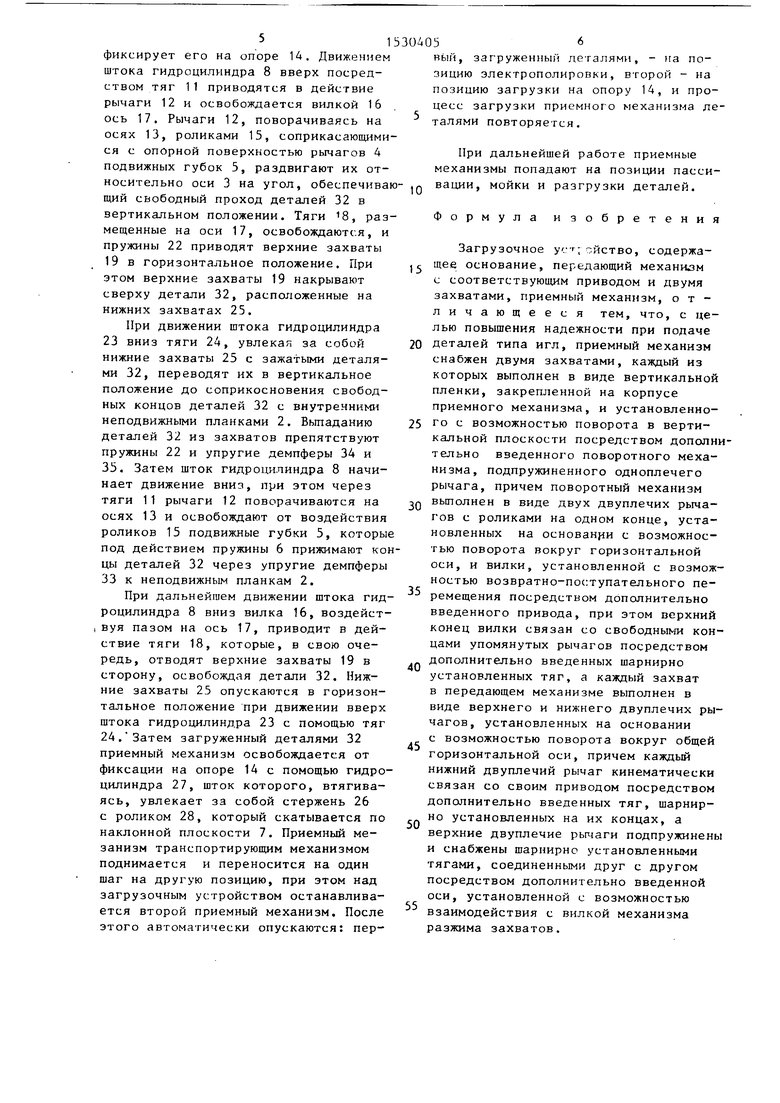
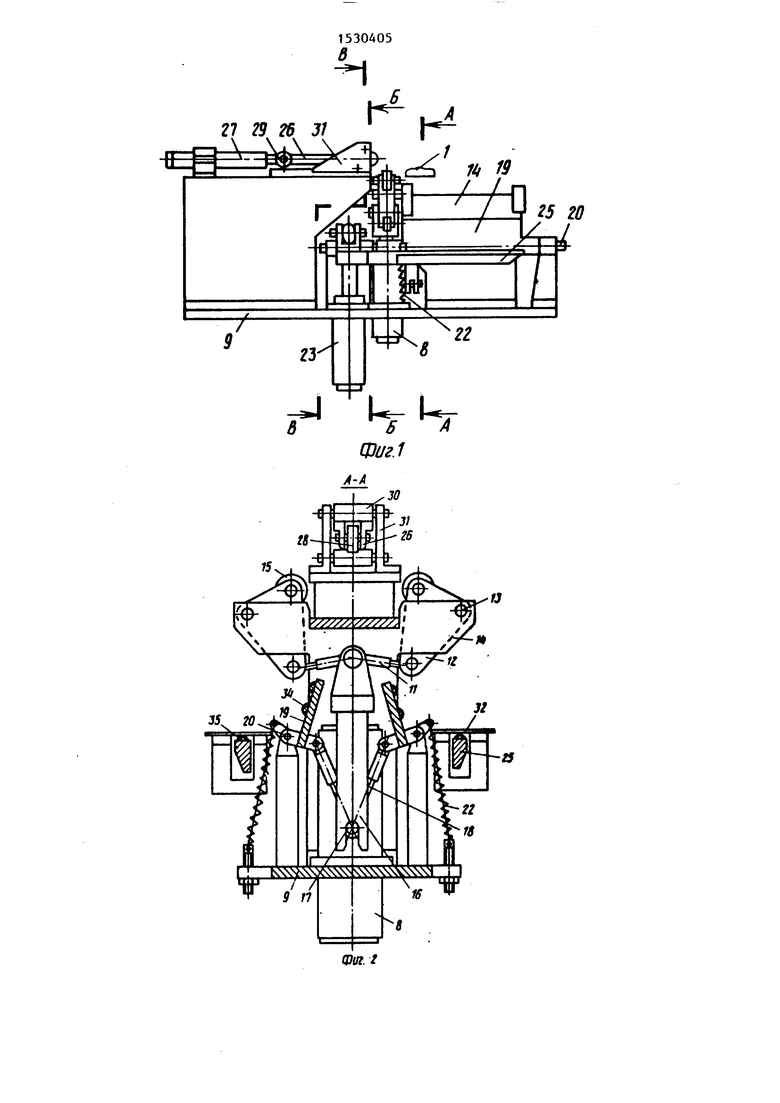
На фиг. 1 изображено загрузочное устройство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 -разрез А-А на фиг.1,вид с установленной кассетой при нижнем положении штока гидроцилиндра механизма захвата деталей; на фиг. 5 - то же, вид с установленной кассетой при верхнем положении штока гидроцилиндра механизма захвата деталей; на фиг. 6 - разрез В-В на фиг. 1, вид с установленной кассетой при нижнем положении штока гидроцилиндра механизма загрузки деталей в кассету.
Загрузочное устройство состоит из передающего механизма, приемного механизма и гидропривода. Приемный механизм жестко закреплен в транспортном механизме (не показан) и состоит из корпуса 1 ,на котором неподвижно установлены внутренние планки 2.На корпусе 1 на оси 3 с помощью рычагов 4 установлены подвижные губки 5, которые прижимают ся к неподвижным планкам 2 с .помощью пружины 6. Относительно продольной оси приемного механизма выполнена наклонная плоскость 7.
Поворотный механизм состоит из гидроцилиндра 8, установленного на основании 9, на штоке которого свободно установлены на оси 10 тяги 11, шарнирно связанные с рычагами 12,
подвижно установленными на осях 13 на опоре 14. Рычаги 12 оснащены роликами 15. На штоке гидроцилиндра 8 закреплена вилка 16 с возможностью взаимодействия с осью 17, связывающей тяги 18, которые шарнирно соединены с верхними захватами 19 передающего механизма. Захваты 19 подвижно установлены на осях 20 в кронштейнах 21 и связаны пружинами 22 с основанием 9.
Передающий механизм состоит из гидроцилиндра 23, установленного на основании 9, на штоке которого шарнирно установлены тяги 24, связанные
с нижними захватами 25. Нижние захваты 25 подвижно установлены на осях 20, которые являются одновременно осями для верхних захватов 19.
Механизм фиксации приемного механизма выполнен в виде стержня 26, шарнирно связанного со штоком гидроцилиндра 27 и оснащенного прижимньм роликом 28 и опорным роликом 29. Стержень 26 размещен в направляющих
роликах 30, установленных на осях в кронштейне 31. Ролик 29, шарнирно связанный со штоком гидроцилиндра 27 и стержнем 26, разгружает шток от воздействия изгибающего момента при
фиксации приемного механизма. Загрузочное устройство предназначено для подачи деталей типа игл 32. Во.всех захватных механизмах имеются упругие демпферы 33-35.
Устройство работает следующим образом.
Детали 32 типа игл механизмом раскладки (не показан) подаются в исходное положение.так, чтобы они находились в горизонтальном положении над нижними захват&ми 25. Шток гидроцилиндра 27 выдвигает стержень 26, при этом прижимной ролик 28 накатывается на наклонную плоскость 7 и плотно
фиксирует его на опоре 14. Движением штока гидроцилиндра 8 вверх посредством тяг 11 приводятся в действие рычаги 12 и освобождается вилкой 16 ось 17. Рычаги 12, поворачиваясь на осях 13, роликами 15, соприкасающимися с опорной поверхностью рычагов 4 подвижных губок 5, раздвигают их относительно оси 3 на угол, обеспечиващий свободный проход деталей 32 в вертикальном положении. Тяги 18, размещенные на оси 17, освобождаются, и пружины 22 приводят верхние захваты 19 в горизонтальное положение. При этом верхние захваты 19 накрывают сверху детали 32, расположенные на нижних захватах 25.
При движении штока гидроцилиндра 23 вниз тяги 24, увлекая за собой нижние захваты 25 с зажатыми деталями 32, переводят их в вертикальное положение до соприкосновения свободных концов деталей 32 с внутренними неподвижными планками 2. Вьшадаиию деталей 32 из захватов препятствуют пружины 22 и упругие демпферы 34 и 35. Затем шток гидроцилиндра 8 начинает движение вниз, при этом через тяги 11 рычаги 12 поворачиваются на осях 13 и освобождают от воздействия роликов 15 подвижные губки 5, которы под действием пружины 6 прижимают коцы деталей 32 через упругие демпферы 33 к неподвижным планкам 2.
При дальнейшем движении штока гидроцилиндра 8 вниз вилка 16, воздейст- , вуя пазом на ось 17, приводит в действие тяги 18, которые, в свою очередь, отводят верхние захваты 19 в сторону, освобождая детали 32. Нижние захваты 25 опускаются в горизонтальное положение при движении вверх штока гидроцилиндра 23 с помощью тяг 24. Затем загруженный деталями 32 приемный механизм освобождается от фиксации на опоре 14 с помощью гидроцилиндра 27, шток которого, втягиваясь, увлекает за собой стержень 26 с роликом 28, который скатывается по наклонной плоскости 7. Приемный ме- занизм транспортирующем механизмом поднимается и переносится на один шаг на другую позицию, при этом над загрузочным устройством останавливается второй приемный механизм. После этого автоматически опускаются: пер
вый, загруженный деталями, - на позицию электрополировки, второй - на позицию загрузки на опору 14, и процесс загрузки приемного механизма деталями повторяется.
При дальнейшей работе приемные механизмы попадают на позиции пассивации, мойки и разгрузки деталей.
Формула изобретения
Загрузочное ус-г; ойство, содержащее основание, передающий механи.зм с соответствующим приводом и двумя захватами, приемный механизм, отличающееся тем, что, с целью повышения надежности при подаче деталей типа игл, приемный механизм снабжен двумя захватами, каждый из которых выполнен в виде вертикальной пленки, закрепленной на корпусе приемного механизма, и установленного с возможностью поворота в вертикальной плоскости посредством дополнительно введенного поворотного механизма, подпружиненного одноплечего рычага, причем поворотный механизм выполнен в виде двух двуплечих рычагов с роликами на одном конце, установленных на основании с возможностью поворота вокруг горизонтальной оси, и вилки, установленной с возможностью возвратно-поступательного перемещения посредством дополнительно введенного привода, при этом верхний конец вилки связан со свободнык/и концами упомянутых рычагов посредством дополнительно введенных шарнирно установленных тяг, а каждый захват в передающем механизме выполнен в виде верхнего и нижнего двуплечих рычагов, установленных на основании с возможностью поворота вокруг общей горизонтальной оси, причем каждый нижний двуплечий рычаг кинематически связан со своим приводом посредством дополнительно введенных тяг, шарнирно установленных на их концах, а верхние двуплечие рычаги подпружинены и снабжены шарнирно установленными тягами, соединенными друг с другом посредством дополнительно введенной оси, установленной с возможностью взаимодействия с вилкой механизма разжима захватов.
гзи 4-hr
ф1/г.1
15
6-Б
Фиг.З
(Pns
Редактор В.Петраш
Составитель Г.Филиппов Техред Л.Олийнык
Заказ 7813/15
Тираж 894
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
16
28
10
г1
П
I
fj Т
цзиг,б
Корректор Н.Король
Подписное
| Устройство для набора комплекта деталей | 1981 |
|
SU992158A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
