28
/ /J го Z 1 77
/ / / ,/ /
ел
ОО
00
IS Z JE
Изобретение относится к машиностроению, а нменно к механизации производственных процессов, и может быть испо пьзова- но в загрузочных устройствах автоматических роторных , 1иний преимущественно для загрузки нх мелкими деталями.
lUvibKi изобретения является повышение надежности работы автомата за счет обеспечения принудительной подачи детали в за1руз()чный ротор.
На фиг. 1 изображен роторный автомат, вид сверху; на фиг. 2 -- разрез А-А на фиг. 1; на фиг. Л разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1.
Роторный аЕггомат содержит неподвиж- Hbiii питате.1Ь (вибробункер) I, ротор 2 за- I П зки. технолошческий ротор 3, соединенный с приводом равномерного врашения (не показан). Несущие органы технологического ротора 3 выполнены в виде пазов 4 и диске 5. установленном на оси технологического ротора 3. Несущие органы загру- ротора 2 выполнены в виде пазов б па на|)ужном диаметре корнуса 7 под пазами 8, которые t OBMecTHo с ведунхими паль- па ми технологнческого ротора 3 образуют 1а. 11 тийский .механизм.
В корпусе 7 радиально размешены с возможностью перемещения вдоль собственной OI.-I ro.iKare.in К), каждый из которых наружным конпом входит в один из соответствующих па.(ОН (). ДАеханизм нрерывистого движения иыио.инен в виде кулачка 11, уста- понлен11о:ч) па оси технологического ротора 3 и имеющего профилированную поверхность 12, контактирующего с ним рычага 13, уста- iioB.iennoro иа оси 14, которая закреплена Па основании 15 автомата.
(.илоиое замыкание осуществляется пру- жии1)11 1Н (не обозначено). На конце рычага 13 установлен отсекатель 17. Корпус 7 ()влен с возможностью врашения на оси 18. Подпружиненный упор 19 закреплен и пазу оси 18.
Для точной установки ротора 2 и.меется пор 2(1, размешенный на нижней поверхности 1ычага , кулачковый унор 21, раз- мешепный на Bepxheii поверхностн корпуса 7, и устройство )рота корнуса 7 ротора 2 До упора 20, состоящее из нары и естерен 22 и 23, кинематически связанных с корпусом 7 Ч1 ре фрикпиопную муфту 24. Шестерня 22 прижата к 1()рикииопной .муфте 24 пружиной 2) пос 1едс1вом тяги 26. На верхнем конце тяги 2() установ,тен упор 27, контактирую- lunii с чиором 28 рычага 13.
В исходном положении дета, 1ь 29 нахо- Д1Г1СЯ li (агрузочно.м роторе 2, деталь 30 находится 14 питаиме 1. Несущий паз 6 загру- f(i4H(iro ротора 2 совпадает с пазом 31 в ии- I а те. 1C I.
Рогорн1,1Й автомат рабогаст с.чедуюшим обра fOjM.
5
0
5
0
5
5
0
Технологический ротор 3 вращается с постоянной угловой скоростью. Палец 9 входит в паз 8 загрузочного ротора 2, поворачивая его. В процессе поворота толкатель 10 скользит по упору 19, выталкивая деталь 29 в несуш.ий паз 4 технологического ротора 3. При дальнейшем вращении ротора 3 палец 9 выходит из паза 8 загрузочного ротора 2, выступ кулачка II поворачивает рычаг 13 на оси 14, преодолевая сопротивление пружин 16.
При этом упор 20 становится на пути движения кулачкового упора 21, затем при дальнейшем движении рычага 13 вправо упор 28 рычага 13 перемещается относительно упора 27, поднимая его и сжимая пружину 25, и через тягу 26 прижимает шестерню 22 к корпусу 7, к дискам фрикционной муфты 24, заставляя поворачиваться корпус 7 до соприкосновения упоров 20 и 21.
После этого рычаг 13 движется влево по профилированной поверхности кулачка 1 1, освобождая фрикционную муфту 24 от воздействия пружины 25, заталкивая деталь 30 в паз 8 загрузочного ротора 2 и в последний момент выводя упоры 20 и 21 из зацепления,
Формула изобретения
Роторный автомат, содержащий основание, технологический ротор, установленный с возможностью вращения от соответствующего привода и кинематически связанный с ротором загрузки, зубчатую передачу и механизм нрерывистого движения, отличающийся тем, что, с целью повышения надежности работы автомата, кинематическая связь между технологическим ротором и ротором загрузки выполнена в виде зубчатой передачи и фрикционной муфты, установленной с возможностью взаимодействия с кор- fiycoM ротора загрузки, свободно установленного на валу, жестко связанном с основанием, и зубчатым колесом упомянутой передачи, расположенным с возможностью осевого перемешения посредством дополнительно введенной тяги, расположенной внутри вала ротора загрузки, при этом механизм прерывистого движения выполнен в виде кулачка, установленного на валу вращения технологического ротора, и подпружиненного рычага, установленного с возможностью поворота в горизонтальной плоскости и взаимодействия с тягой и корпусом загрузочного ротора посредством дополнительно введенных упоров, соответственно закрепленных на тяге, корпусе рычага и корпусе загрузочного ротора, причем корпусы технологического ротора и загрузочного установлены с возможностью взаимодействия посредством дополнительно введенных пальцев и пазов, соответственно закрепленных на технологическом роторе и выполненных на корпусе загрузочного ротора.
В 8 г
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторная линия | 1989 |
|
SU1710302A1 |
| Рабочий ротор | 1987 |
|
SU1526956A1 |
| Роторный автомат | 1982 |
|
SU1042950A1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
| Роторный автомат для нарезания резьбы | 1987 |
|
SU1465203A2 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |


Изобретение относится к машиностроению, а именно к механизации производственных процессов, и может быть использовано в загрузочных устройствах автоматических роторных линий преимущественно для загрузки их мелкими деталями. Целью изобретения является повышение надежности автомата в работе. В роторном автомате, содержащем основание 15, технологический ротор, установленный с возможностью вращения и кинематически связанный с ротором загрузки, кинематическая связь между технологическим ротором и ротором загрузки выполнена в виде зубчатой передачи 22 и 23 и фрикционной муфты 24, установленной с возможностью взаимодействия с корпусом ротора загрузки, свободно установленного на валу, жестко связанном с основанием 15. Шестерня 22 прижата к фрикционной муфте 24 и установлена с возможностью осевого перемещения посредством тяги 26, расположенной внутри вала ротора загрузки. Механизм прерывистого движения выполнен в виде кулачка 11, установленного на валу вращения технологического ротора и подпружиненного рычага 13, который взаимодействует с тягой 26 и корпусом загрузочного ротора. Корпус технологического ротора взаимодействует с корпусом загрузочного ротора. 4 ил.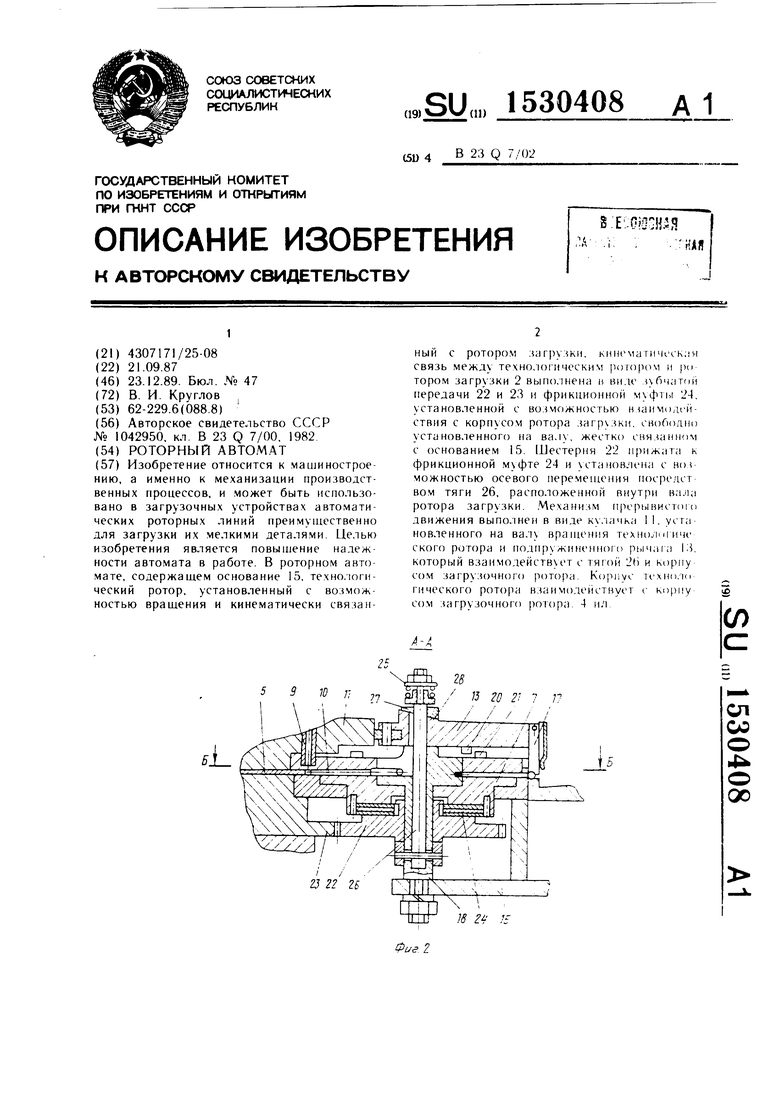
. З
ФигЛ
| Роторный автомат | 1982 |
|
SU1042950A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
