СП
05
;о
СП
05
ко. Ич ,
J.R K I
Изобретение огноеится к епаикогтроеиию, к частности к мног опозиционным роторным автоматам, где требуется последовательное выпо.-щение над одной деталью различных тс хиолосических онераций как с вран1ак)- ншмся, так и с остановленным iiinnii- де.:ем.
Целью изобретения является расширение гехн(),тогических возможностей роторного автомата за счег осуществления онераций обработки как с вран1аклиимся.так и с оста- нон.1еин1 1м и жестко зафиксированн1)1м Н111инде.1ем, и обеспечение быстродействия.
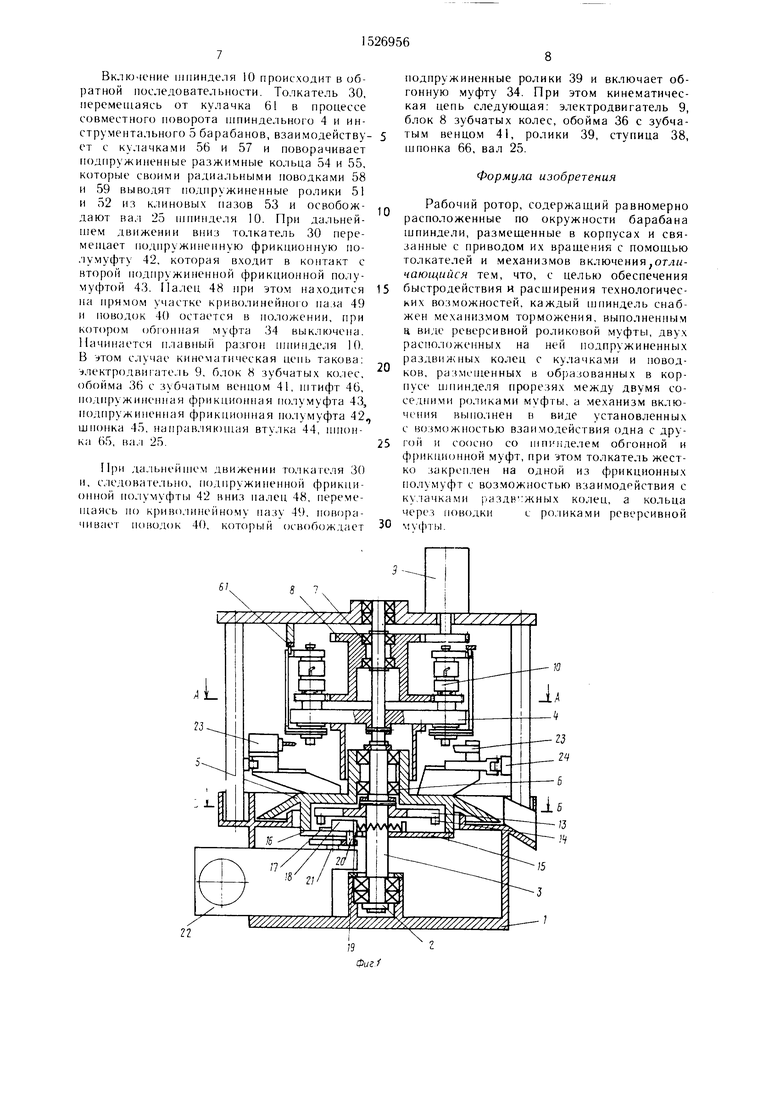
На (|1И|-. 1 представ.к на конструктивная схема рабочего ротора; на фиг. 2 разрез Л Л на фиг . I; на фиг. 3 разрез Б Г) на фиг. I; на ()иг. 4ншинасль; на
. 5 ра(рез В ti на фиг. 4; на 4 иг. 6 разрез 1 на фиг. 4; на фиг, / разрез Л I на фиг 4; на фиг. iS схема движения ннсгрумента.чьного барабана.
Рот()рн1,1Й автомат (фиг. 1) содержит станину 1. на кото|)ой установ.ич техно- .1огическн11 Kjrop 2, состоящий из нала 3, шиинде, ibHoro 4 и инст)умента, 1ьного 5 барабанов. Шпиндельный барабан 4 жестко соединен с ва.юм 3, а инструмента.)1Й бара- баи Г) усганов.ген на Ba.iy 3 с номощьк) 11од1ниниик()в 6 с вочможноетьк) качател)- нок) двнже1Н1Я. На na/iy 3 на но. ц ках 7 установлен б.юк 8 зубчаП)1х служащий д,1я кинема пчеекой свя (и )1одви|ателя 9 со иншн.де. 1ями ().
Шни идельны барабан 4 (фиг. 2} н)огочки 11. в которые вход1Гг под i неи111,1Й i)iiKca-ioi) 12, iaKpeii.-ieHHbin :к не I.
Внутри иис I )умен I а,.1ьного ()ана h на Ba.iv ii cKiiioB.ieii диск 13 с- lui. Ui н;Ц)и- ческими упорами 14, ко. гичество когорых равно чис, |у HUUiH. ie.ieii Id. ( HH.iy на инстру- , 1ьпом барабане Г) (tf)Hr. 3| закреп.leii диск 15 с радиа,)1м иазом hi. На .1иске парал,1е. 1Ы1О иазу 1в на нан)ав,1як)11и1х 17 ч станов. Н н ноднружиненньп |()иксатор 18, нередняя часп. KOTOfioro выно,тне11а. в виде K.iHHOBoro на la.
Фиксатор 18 сиабжен выстуном Г.). вхо- дяниш в иа.( Hi днска 13. В гот же iia.i Hi снизу входит К()ивом1ии 20, установленный на выходном ва,1у 21 нривода 22.
Диск 15 с иазом Ih и кривоииш 20 иред- С1авля1()г собой кр11ВОН1ИН11о-ку. ии:нЫ11 механизм, а .1НСК 13 с у норами 14 и нодпру- жнненн1.11 | фнксатор 18 механнзм преры- висюго твижеиия гехно.лог ического |ioio- pa 2.
Па HHcrj) MeH ia.iijHOM бараоаи. ; yci;:- HOii.ieHbi рабочие го. ювки 2i, а на станине I закрен/нди, кулачки 24 ;1.::я их iijiiiHo.ia. Ко. Н1чес-| во рабочих го/ювок fi;i две меньгие, чем ко.-1нчество шиин.челей. Оставшиеся две ио.ищии на ннстру меита,1Ы1ом барабане 5
занимают загрузочное и р(.йство (не ноказаны)
разгрузочное
0
5
Q
5
5
0
15
55
5
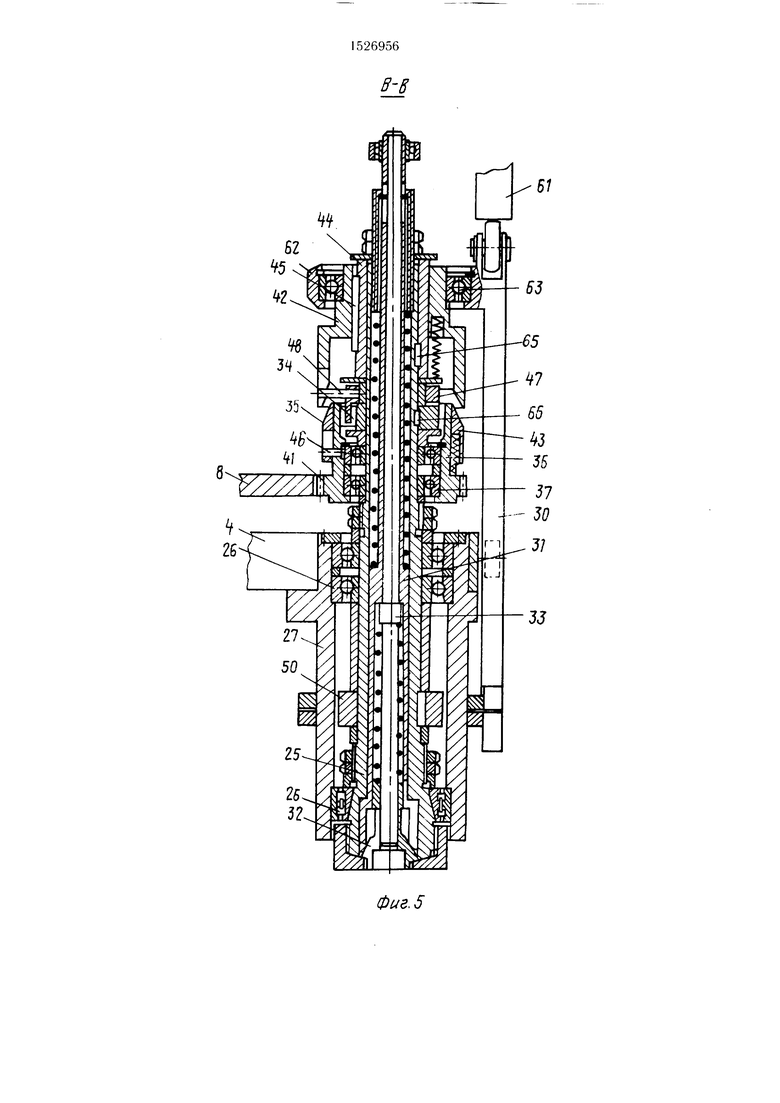
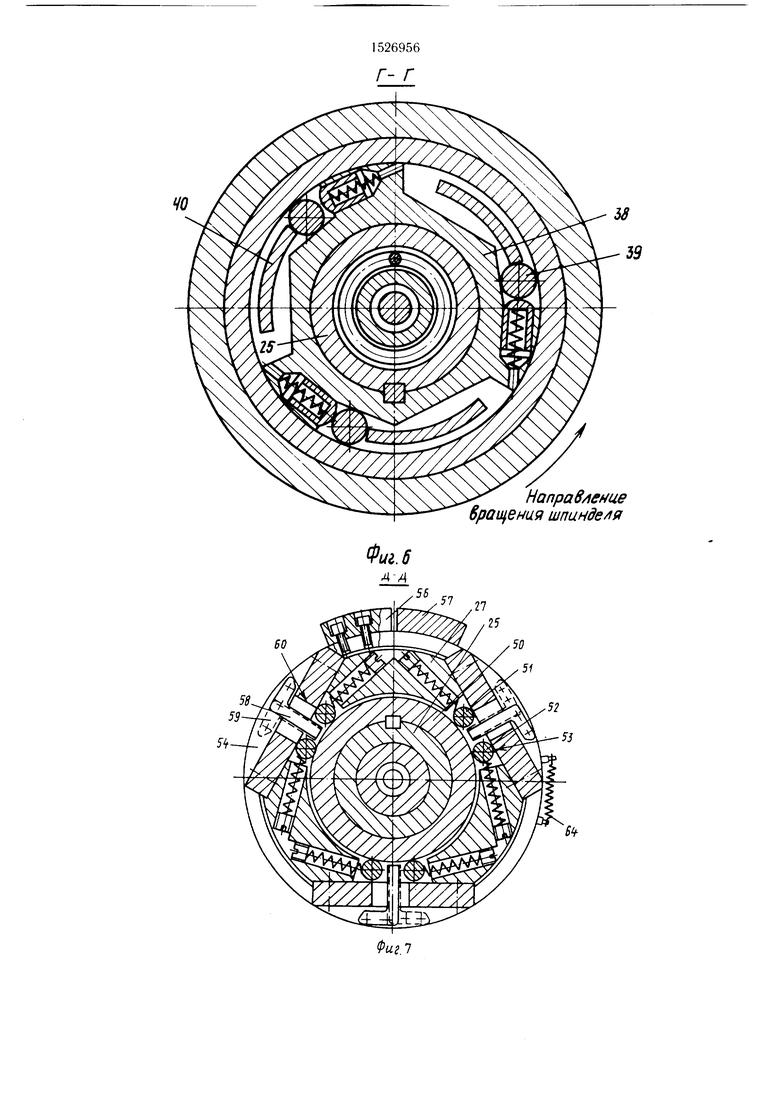
Каждый из нгнинделей 10 (фиг. 4 и 5) имеет но.чый вал 25, установленный носредст- пом НОДН1ИГ1НИКОВ 26 в корпусе 27, механизм 28 включения, механизм 29 торможения и то.-1катель 30 для управления включением. Внутри вала 25 расположены подпружиненная гильза 31, заж.имиая цанга 32 и поднружинепный выталкиватель 33 дета- „ 1 е и.
Механизм 28 включения и нипделя И) вы- полнен в виде сочетания обгонной 34 (фиг. 6) и фрикционной 35 муфт. Обгонная муфта 34 состоиг из обоймы 36, установленной на ва.:|у 25 i 1ом(лиью нод 11И ни:к;-н 37 1чест- ко С15ячанной с ва.юм 25 сТ . 38 с 1.)Д пружиненными Оликамс У и ионодка 40. На 1.1б(||1ме 36 В1.1нол1 н ибчатый венец 4i, входящий в зацепление с бчатым блокС М 8.
Ф 1икиионная му(|1Та 3.-) содержит две под иные фрик11.1.Н1 ые полумуфты 42 и 4,), одна ич к(/т(1рых Установлена на иаиравл як)Н1.ей вту,;1ке 44 на 1нпонке 45, а дру|ая | наружи на обойме 3(i и связана с iii ii посредством штифта 46, входящего в ineBoii паз 47 подпружиненной (|)рикционно1 | нолум 4 ты 43.
11г;водок 4(1 (/ (,иной муфты 34 снабжен на.1ьпсм . i.oHei i которого входит в к|)иволннейнмй паз 49 п(),1умуф)ты 42.
Л(. V ани .м 29 гирможения шиинделя К) и}|И1 7) и);1ержи1 реве)сивпую роликовую iy(t:lv, вк,:1К)ча1ОП1ук) фрикционный диск 50, жес тк.) .taKpeii,ieHHbiii на валу 25, и ро:1и- | ,1: 51 и 52, установленные поиарно в кли- 1 овь;х пазах 53 между корпусом 27 и фрикционным дпском 50 и подпружиненные на- однн другому, и установленные на периферии муфты снаружи корпуса 27 Н1 ип1де. 1я К) нодиружиненные раздвижные ко,11)Ца 54 и 55, снабженные со1. 1тветствен- но ку.пачками 56 и 57 и радиальными но водка ми ,58 и 59, размешенными в ii|iope- 60 корпуса 27 шпииделя 10 между коликами 51 и 52.
Л,1Я управления механизмом 29 торможе- ння и мехагшзмом 28 включения ии1инделя 10 на ишинде.;1ьном барабане 4 установлен толкате, 1Ь 30, взаимодействующий с кулачками 61, закрепленными на станине 1 автомата. То,1катель 30 выполнен как одно целое с KjioHHJreiiHOM 62, связанным через гк.)дшип- мпк 6. с подпружиненной фрикционной полу- муфгой 42. Кольца 54 и 55 связаны между собой п|пжи)К)й 64.
Рабочи ротор работает следующим обра : ,()м.
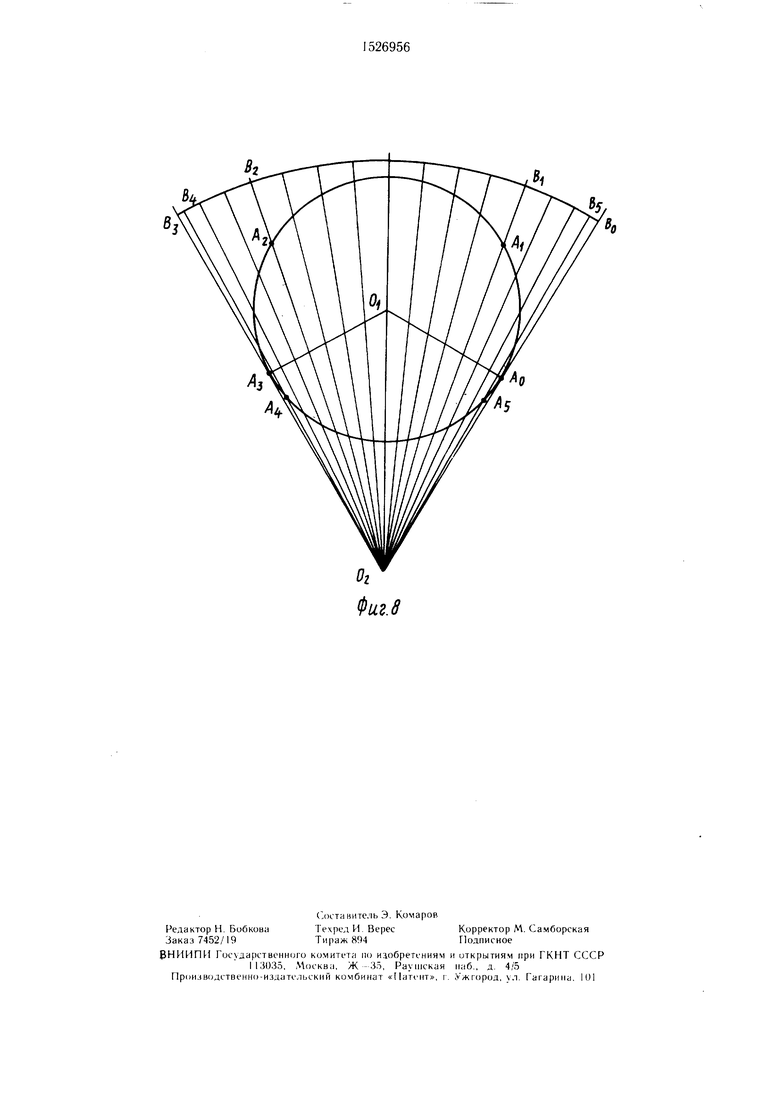
11ри1Я)д 22 ротора обеспечивает равно- м( рное нрашепие кривоишпа 20 по окруж- iKKTH с uCHipoM в точке О| (фиг. 8). Кривошип 20 чостоянно находится в радиальном пазу К) диска 15, закренленного на
инструментальном барабане 5, поэтому последний соверн1ает качательное движение в пределах угла Bi)O2B:i, где О - ось технологического ротора, а О2Вп, ОгВ: и так далее - положения оси паза 16.
Одному циклу работы автомата соответствует один оборот кривошипа 20. В исходном положении кривошип 20 находится в точке An, ось паза 16 - на луче , фиксатор Г - в контакте с одним из упоров 14 диска 15, при этом шпиндельный 4 и инструментальный 5 барабаны соединены между собой. При вращении криво1иипа 20 по дуге Ai.AiAaAj технологический ротор как одно целое поворачивается на угол ) и в процессе этого движения рабочие головки 23, взаимодействуя с кулачками 24, получают движение подачи и обрабатываю заготовки, установленные в шпинделях 10. Профиль кулачков 24 выбирается таким, что в пределах угла BnOaBi происходит быстрый подвод, в пределах угла BiO-jB- - рабочий ход, а в пределах yr. ia ))B,i - быстрый отвод режущего инст)умента.
Когда ось кривошипа 20 проходит точ- KV А.,, технологический ротор, находится к неподвижном состоянии, рабочие головки 2 Л в исходном положении. При вращении кривошипа 20 по дуге АзА он взаимодействует с В1 1ступом 19 фиксатора 18 и no. iHocTi.io выводит последний из контакта с yiiop;i ui 14 диска 15.
В ЭК) время шпиндельный барабан 4 зафикеир:1ван от самопроизвольного поворо- га 110Д11ружиненнь м фиксатором 12, входящим в с(Я)тветствуюшую проточку 1 1 шпин- дельногч) барабана 4.
да.и шейнем движении кривошипа 20 () дуге .A.i.AiAsA, инструментальный барабан Г) ускоренно возврашается в исходное no. io./fA Hne.
При подходе оси кривошипа 20 к точке .Л,| в 11реде, 1ах дуги As-.Ao фиксатор 18 вводится в контакт со следующим уно- 14 диска 15. достижении кривошипом 20 положения Ai сцепление инструментального 5 и шгшндельного 4 барабанов пс.).1иостьк) зака нчивается.
Для остановки любого из ншинделей 10 при необходимости выполнения, например, oriepauHii фрезерования ключевых пазов, эксцентричных сверлений и т. п., на соот- ветствук1ше11 рабочей позиции в начале цик- . la работы автомата, т. е. в начале совместною поворота шгшндельного 4 и инстру- мент;;.ь,1ого 5 барабанов, толкатель 30, ос- нобождаемый кулачком 61, перемешается inu C с кронштейном й2 и подпружинен- Hoii фрикционной полумуфтой 42 вверх. Пален 18, скользя но криволинейному пазу 49. поворачивает поводок 40 обгонной муфты 34. который выводит подпружиненные ролики 39 из контакта с обоймой 36
и ступицей 38. Тем самым разрывпегея кинематическая связь вала 25 с o6oitMoii 3t), которая продолжает врап1аться, находясь н зацеплении с зубчатым блоком 8. При своем
дальнейшем движении вверх толкатель 30 взаимодействует с кулачками 56 и 57 np.iи ления и освобождает подпружиненшпе ра ь движпые кольца 54 и 55, к()то|1ые, поворачиваясь один навстречу друюму. выводя г
п радиальные поводки 58 и 59 из контак, с подпружиненными роликами 51 и 52 реверсивной муфты. При этом указанные ролики стремятся заклинить вал 25 шниндс - ля 10.
5Кулачки 56 и 57 управления,установ.к нные на кольцах 54 и 55, выполнены разновысокими, что обеспечивает при взаимодействии с толкателем 30 несинхронный поворот колец 54 и 55, при этом вначале поворачивается кольцо 54, которое своими радиальиыми поводками 59 освобождает ро,1и- ки 51, подпружиненные против направления вращения вала 25 шпинделя 10. Эти ролики первыми входят в клиновой паз 53 между корпусом 27 Ц1пинделя 10 и фрикпи5 онным диском 50 и осуществляют плавное торможение вала 25.
Затем при дальнейшем движении вверх толкатель 30 взаимодействует с кулачком 57 управления, установленным на кольце 55, KOTOpcie, новорачиваясь, освобождает свои0 ми радиальными поводками 58 ро.чики 52, подпружиненные в направлении вращения шгшнделя 10.
После окончания взаимоде11ствия толкателя 30 с кулачками 56 и 57 управления подпружиненные ролики 51 и 52 ре5 вереивной муфты заклинивают ва.1 25 шпинделя 10, который оказывается жестко зафиксированным от проворота.
Процесс отключения вращения Ba.ia 25 шпинделя 10 осуществляется в конце цикла
(-) работы автомата за 8 до окончания сов местного поворота Ц1пиндельно14) 4 и инструментального 5 барабанов, когма рабочие головки 23 отводятся кулачками 24 в исходное положение, затем за 3 до окончания цикла начинается торможение ва.та 25 е по5 мощью роликов 51, причем торможение вала 25 продолжается и после остановки ротора 2, когда инструмента, барабан 5 ускоренно поворачивается в исходное по, южение и происходит смена по зиций обработки, что позволяет иметь .юсга0 точно времени для н.тавной остановки вра- ша юше гося ш п и н дел я.
Окончательное заклинивание ва.ш 25 роликами 52 осуществляется в пача.1е c.ie- дуюшего цикла в пределах ,Y поворота рое тора 2, когда происходит быстрый подвод рабочих головок 23, после чего начинается выполнение технологических операци11 при неврашаюн1емся цшинде.-ie.
Включение шпинделя 0 происходит в обратной последовательности. Толкатель 30, перемещаясь от кулачка 61 в нроцессе совместного поворота шпиндельного 4 и инструментального 5 барабанов, взаимодействует с кулачками 56 и 57 и поворачивает подпружиненные разжимные кольца 54 и 55, которые своими радиальными поводками 58 и 59 выводят подпружиненные ролики 51 и 52 из клиновых пазов 53 и освобождают на,: 25 шпинделя 10. При дальнейшем движении вниз толкатель 30 перемещает подпружиненную фрикционную по- , 1умуфту 42. которая входит в контакт с второй подпружиненной фрикционной полумуфтой 43. Палец 48 при этом находится на прямом участке криволинейною паза 49 и поводок 40 остается в положении, при котором обгонная муфта 34 выключена. Начинается плавный разгон 1цпи |де;1я И). В этом случае кинематическая цепь такова: лектродви1 ате.1ь 9, блок 8 зубчатых колес, обойма 36 с зубчатым венцом 41, штифт 46, цоднружнненная фрикционная полумуфта 43, подпружиненная фрикционная нолумуфта 42, шнонка 45, направ.чяюшая втулка 44, шпонка 65, ал 25.
П|П1 да;1Ьнейн1ем движении толкателя 30 и, следовательно, юдпружиненной фрикционной п()лумуфт)1 42 вниз налец 48, переме- П1аясь по к)иво. 1инейному пазу 49, поворачивает поводок 40, который освобождает
подпружиненные ролики 39 и включает обгонную муфту 34. При этом кинематическая цепь следующая: электродвигатель 9, блок 8 зубчатых колес, обойма 36 с зубчатым венцом 41, ролики 39, ступица 38, шпонка 66, вал 25.
Формула изобретения
Рабочий ротор, содержащий равномерно расположенные по окружности барабана шпиндели, размещенные в корпусах и связанные с приводом их вращения с помощью толкателей и механизмов включения оглн- чающийся тем, что, с целью обеспечения быстродействия и расширения технологических возможностей, каждый шпиндель снабжен механизмом торможения, выполненным li виде реверсивной роликовой муфты, двух расположенных на ней подпружиненных раздвил ных колец с кулачками и поводков, размещенных в об)азованных в корпусе Ц1пинделя прорезях .между двумя со- се.аними роликами муфты, а механизм включения вьпю.чнен в виде установленных с возможностью взаимодействия одна с другой и соосно со ,1ем обгонной и ф)икци(яжой муфт, при этом толкатель жестко закреплен на одной из фрикционных полумуфт с возможностью взаимодействия с ку.чачками раздв :жных колец, а кольца через поводкис ро.пиками реверсивной
Му(()1Ы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Роторный автомат | 1990 |
|
SU1722721A1 |
| Роторный автомат | 1988 |
|
SU1579727A2 |
| Роторный автомат | 1987 |
|
SU1437190A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
| Автомат для намотки перфорированной пленки и упаковки в бумагу | 1975 |
|
SU561699A1 |
| Автомат для сварки кольцевых швов в среде защитных газов | 1974 |
|
SU519294A1 |
| Роторный автомат | 1989 |
|
SU1662806A2 |
| Шпиндельная бабка пруткового автомата | 1971 |
|
SU405261A1 |

Изобретение относится к многопозиционным роторным автоматам, где требуется последовательное выполнение над одной деталью различных технологических операций. Целью изобретения является расширение технологических возможностей за счет осуществления операций как при вращающемся шпинделе, так и при жестко зафиксированном. В рабочем роторе с равномерно расположенными по окружности барабана шпинделями, связанными с приводом их вращения, каждый шпиндель имеет механизм включения 28, механизм торможения 29 и толкатель 30. Механизм включения 28 выполнен в виде обгонной и фрикционной муфт, установленных с возможностью взаимодействия одна с другой посредством штифта и пальца 48, расположенных в пазах 47 и 49, выполненных во фрикционных полумуфтах. Механизм торможения 29 выполнен в виде реверсивной роликовой муфты, двух расположенных на ней подпружиненных раздвижных колец 54 и 55 с кулачками 56 и 57. При опускании толкателя 30 и его взаимодействии с кулачками 56 и 57 кольца 54 и 55, поворачиваясь относительно корпуса муфты в противоположные стороны с помощью поводков, расположенных между роликами муфты в противоположные стороны с помощью поводков, расположенных между роликами муфты, выключают механизм торможения и освобождают шпиндель. При обратном перемещении зажимают его. Толкатель 30 жестко связан с одной из полумуфт фрикционной муфты. 8 ил.
61
zv
гч
в-6
61
Фиг. 5
60
Направ/1еиие вращения шпанде/1Я
Фиг. 6
50
5i
52
в5х
| Кошкин Л | |||
| Н | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
