I «--Г7 I 

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Установка для нанесения защитных покрытий на сыры | 1974 |
|
SU519172A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА БЕСКАМЕРНОЙ ШИНЫ НА ОБОДЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2428321C2 |
| Стенд для сборки траков гусеничной цепи | 1988 |
|
SU1549667A1 |
Изобретение относится к машиностроению, в частности к автоматизации и механизации производственных процессов. Целью изобретения является повышение надежности и долговечности робота за счет исключения заклинивания копирного пальца и снижения износа направляющих корпуса. При включении гидропривода 17 шток через выходной элемент 28 и палец 27 перемещает подвижную часть 5 корпуса вместе с водилом 26 вверх, при этом копирный палец 25 движется по копирному пазу основной пластины 18 и одновременно воздействует на профильный паз отсекающей пластимны 19. В конце хода копирный палец 25 взаимодействует с фиксатором 22 и поворачивает его. Происходит перефиксация отсекающих пластин 19. Одновременно водило 26, поворачиваясь, перемещает каретку 10 по направляющим 16, один из рядов ячеек входит в зону захватной головки и происходит захват или сброс детали. При движении гидропривода 17 вниз все элементы перегружателя возвращаются в исходное состояние, а при повторном подъеме к захватной головке подходит другой ряд ячеек. 4 ил.
Фиг.З
3
через выходной элемент 28 и палец 2 перемещает подвижную часть 5 корпуса вместе с водилом 26 вверх, при этом копирный палец 25 движется по копирному цазу основной пластины 18 и одновременно воздействует на профильный паз отсекающей пластины 19 В конце хода копирный палец 25 взаимодействует с фиксатором 22 и поворачивает его. Происходит перефиксация отсекающих пластин 19. ОдИзобретение относится к машиностроению, в частности к автоматизации и механизации производственных процессов.
Цель изобретения - повышение надежности и долговечности за счет исключения заклинивания копирного пальца и снижения износа направляющих корпуса.
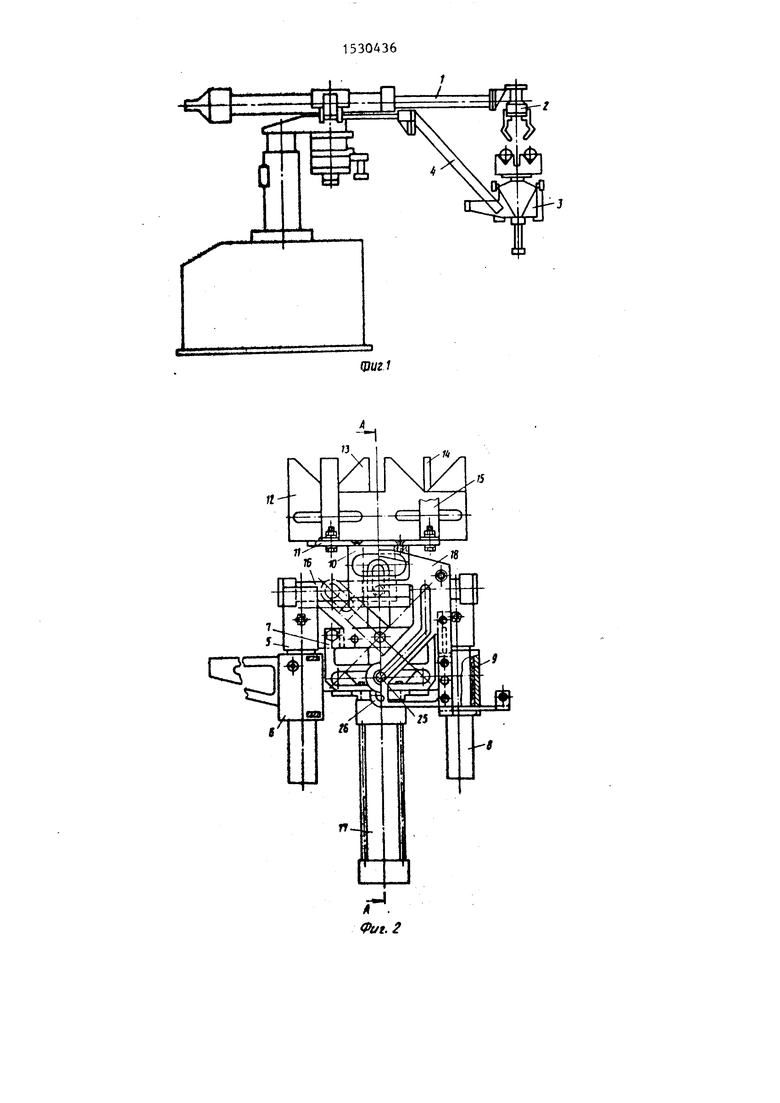
На фиг.1 изображен робот с перегружателем, общий ВИД , на фиг. 2 - перегружатель, общий вид; на фиг.3 - разрез А-А на фиг.2; на фиг.4 - вид Ь .З.
Промышленный робот с перегружателем содержит механическую руку 1 с захватной головкой 2 и промежуточный перегружатель 3 с ячейками для деталей.
Промежуточный перегружатель 3 пос- редством кронштейна 4 установлен на одной из подвижных частей механической руки 1 .
Перегружатель содержит корпус,сое тоящий из подвижной части 5 и неподвижной части 6.
Для перемещения подвижной части 5 корпуса с закрепленной на ней промежточной пластиной 7 относительно непо вижной части 6 служат вертикальные колонки 8 с направляющими втулками 9 На подвижной части корпуса 5 установлена каретка 10. Па каретке 10 закреплен кронштейн 11, на котором мон- тируются две пары пластин 12 и 13, образующих ячейки для укладки детале габаритные пластины 14 и габаритные пластинчатые пружины 15. Каретка 10 установлена с возможностью горизонтального перемещения по направляющим 16. При этом за счет поперечного перемещения относительно друг друга пластин 12 и 13, а также продольного
304364
повременно водило 26, поворачиваясь, перемещает каретку 10 по направляю- ищм 16, один из рядов ячеек входит в зону захватной головки и происходит захват или сброс детали. При движении гидропривода 17 вниз все элементы перегружателя возвращаются в исходное состояние, а при повтор- , ном подъеме к захватной головке подходит другой ряд ячеек. 4 ил.
перемещения габаритных пластин 14 и габаритных пластинчатых пружин 15 производится настройка перегружателя на различные типоразмеры деталей.
Па неподвижной части корпуса 6 установлен гидропривод 17, основная пластина 18 с V-образным копирным пазом, а также механизм регулировки относительного положения ячеек по отношению к захватной головке 2.
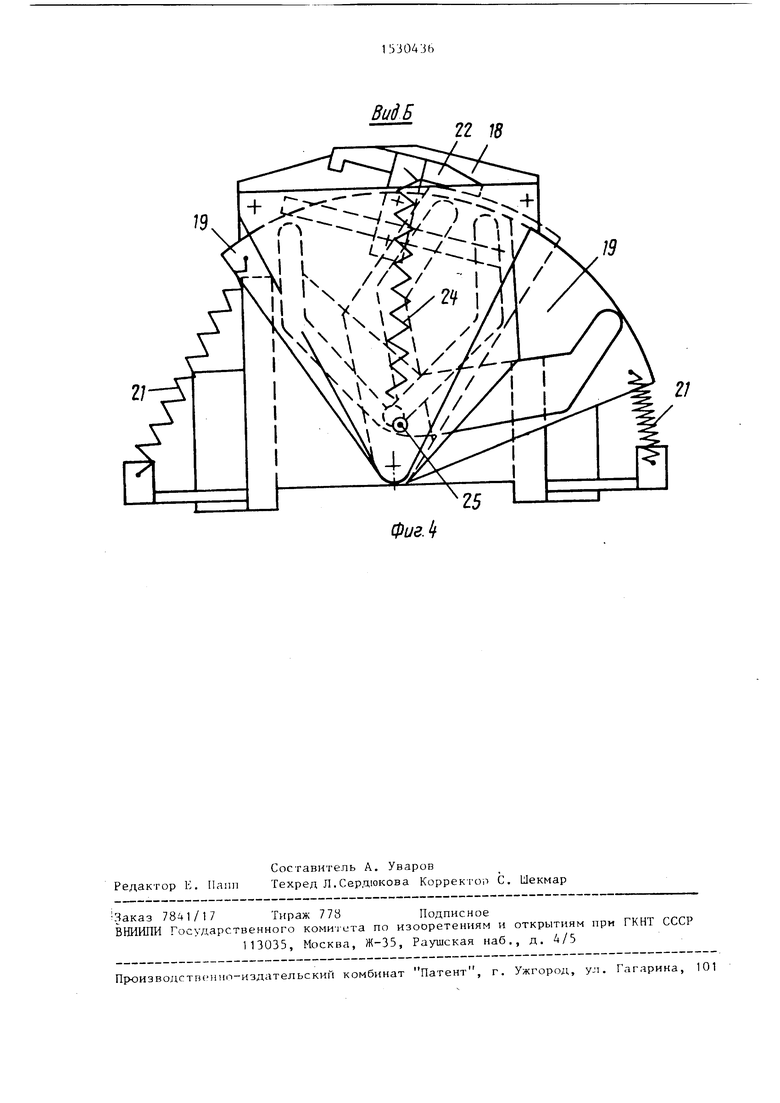
Механизм регулировки состоит из двух отсекающих пластин 19 с копир- ными пазами, расположенных зеркально по отнощению друг к другу, и шар- нирно установленных на распорной втулке 20. Отсекающие пластины 19 с помощью пружин 21 приводятся в крайнее откинутое положение по отношению к основной пластине 18. Фиксированное положение отсекающих пластин 19 по отношению к основной пластине 18 обеспечивается перекидным фиксатором 22, установленным на оси 23. Фиксатор 22 удерживается в одном из откинутых, положений с помощью пружины 24
Промежуточная пластина 7 имеет горизонтальный паз, в котором подвижно вдоль оси установлен копирный палец 25. Последний одним концом взаимодействует с V-образным копирным пазо основной пластины 18, а также с профильными пазами отсекающих пластин 19 и с перекидным фиксатором 22, а другим концом с водилом 26, шарнирно установленным на пальце 27, соединяющим выходной элемент 28 привода 17 с подвижной частью 5 корпуса перегружателя 3. Водило 26 взаимодействует одним концом с пальцем 25, а другим концом с кареткой 10.
Промышленный робот с перегружателем работает следу101цим образом.
э
При включении гидропривода 17 шт через выходной элемент 28 и палец 27 возлействует на подвижную часть корпуса перегружателя 3. Подвижная часть 5 корпуса перегружателя 3 посредством колонок 8 и направляющих ,втулок 9 совершает возвратно-поступательное движение.
При движении штока привода 17 вверх соединительный палец 27 с во- дилом 26, подвижная часть корпуса 5 с промежуточной пластиной 7 и установленным в ее горизонтальном пазу копирным пальцем 25 также двигаются вверх. При этом одна из отсекающих пластин 19 под действием фиксатора 22 находится в фиксированном положении, а другая под действием пружины 21 находится в крайнем положении и закрывает одну из ветвей V-образно- го копирного паза на основной пластине 18.
Копирный палец 25 поднимается вверх, при этом своим концом он дви жется по открытой ветви V-образного копирного паза на основной пластине 18 и одновременно воздействует на профильный паз отсекающей пластины, находящейся в крайнем положении. В конце хода копирный палец 25 взаимодействует с фиксатором 22, поворачивает его вокруг оси 23, при этом присходит перефиксация отсекающих пластин 19. Одновременно второй конец копирного пальца 25 взаимодействует с водилом 26, поворачивая его вокруг соединительного пальца 27. Водило 26 перемещает каретку 10 по направляющим 16. В результате один из двух рядов ячеек для укладки деталей входит в зону захватной головки 2 и совмещается с ее осью. Схват сжимается или разжимается и соответственно забирает или укладывает деталь в ячейки перегружателя.
При движении штока привода 17 вниз все механизмы перегружателя вовращаются в исходное положение, а расфиксированная отсекающая пласти
Q 5 0
5 0
5
0
5
36о
на 19 перекрывает же другую ветвь V-образного копирного паза основной пластины 18. В результате следующего движения вверх в зону механизма захвата войдет следуюио1й ряд ячеек для деталей. При этом наличие габаритных пластинчатых пружин 15 обеспечивает стабильность размеров деталей от базы (габаритных пластин) до оси руки робота при использовании ег о в заг- рузочно-разгрузочных операциях на металлорежущем оборудовании.
Фо-рмула изобретения
Промьшшенный робот, содержащий подвижную механическую руку с захватной головкой и перегружатель, корпус которого жестко установлен на подвижной механической руке, а его .кронштейн, несукдай ячейки для деталей, жестко связан с кареткой, установленной подвижно в направляющих корпуса и кинематически связанной с гидроприводом, при этом перегружатель имеет габаритные планки в каждой ячейке и основную планку, закрепленную на корпусе и имеющую копирный паз, в котором размещен копирный палец, шарнирно связанный в свою очередь с гидроприводом, а также механизм регулирования положения ячеек кронштейна перегружателя, отличающийся тем, что, с целью повыщения надежности и долговечности за счет исключения заклинивания копирного пальца и снижения износа направляюш 1х корпуса, он снабжен водилом, один конец которого шарнирно связан с кареткой, а другой - с копирным пальцем, при этом корпус выполнен из двух шарнирно связанных между собой подвижной и неподвижной частей, одна из когорых жестко связана с механической рукой, а другая кинематически связана с одной стороны с гидроприводом, а с другой шарнирно с водилом, причем одна из габаритных планок в каждой ячейке перегружателя выполнена упругой.
11
Г5
л .
Фиг. 2
IB
ВидБ
22 18
IS
ФигЛ
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
