11
Изобретение относится к мапштю- строению, в частности к автоматизации и механизации производственных процессов.
Цель изобретения - расширение технологических возможностей за счет работы с деталями в широком диапазоне размеров.
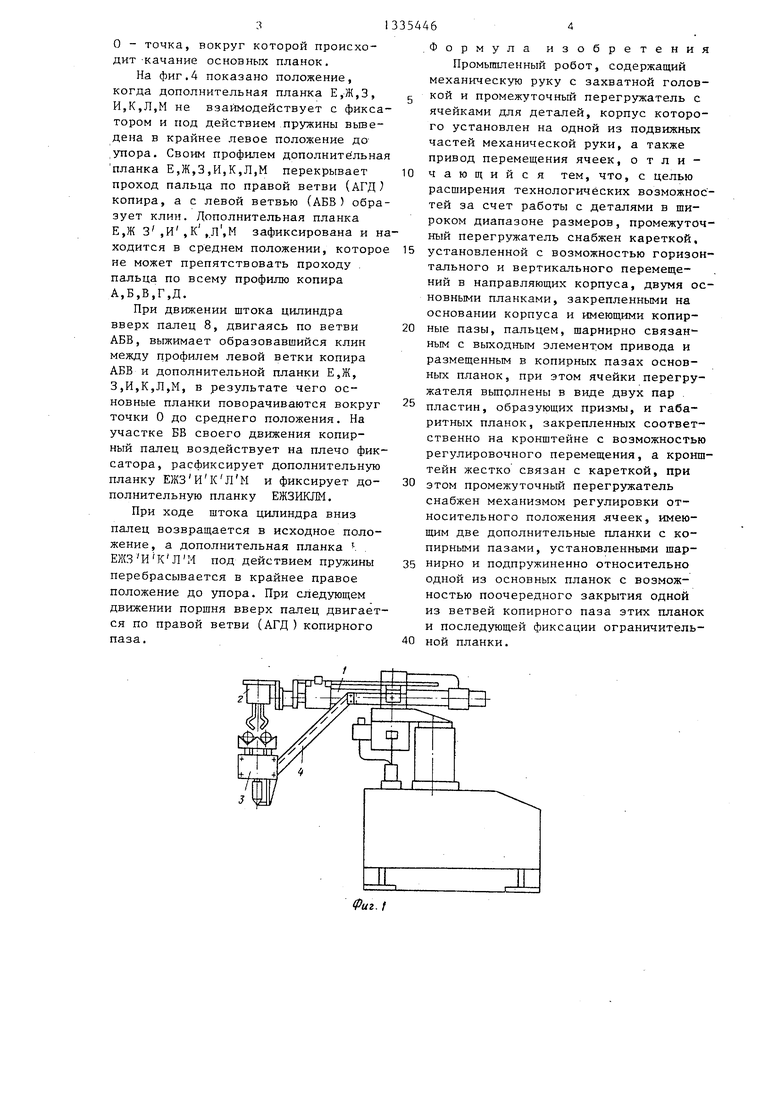
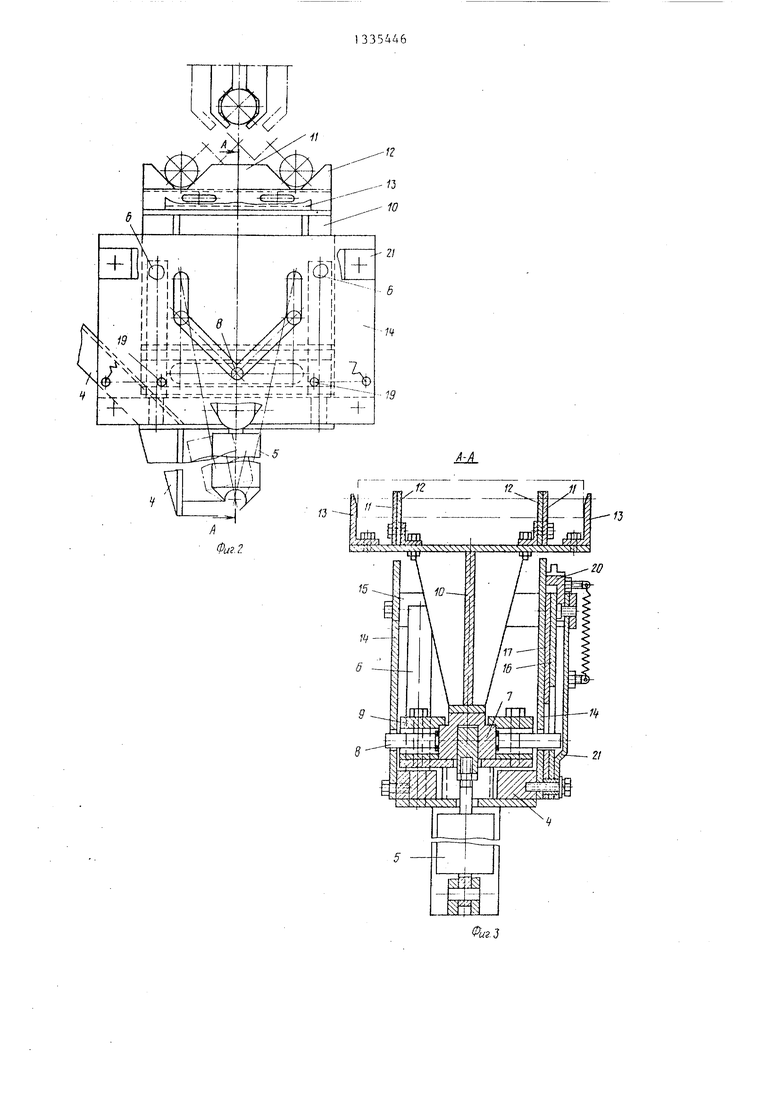
На фиг.1 изображен промышленный робот с перегружателем, общий вид; на фиг. 2 - перегружатель, общий вид; на фиг.3 - разрез А-А на фиг.2; на фиг.4 - положение дополнительной планки при движении копирного пальца по левой ветви копирного паза основной планки; на фиг.5 - то же, при движении копирного пальца по правой ветви копирного паза.
Промьпиленньм робот содержит механическую руку I с захватной головкой 2 и промежуточный перегружатель 3 с ячейками для деталей. Корпус промежуточного перегружателя 3 посредством кронштейна 4 установлен на одной из подвижных частей механической руки .
Промежуточньш перегружатель 3 сое тоит из корпуса с основанием, на котором установлен привод, например си ловой цилиндр 5 с пружиной 5 и вертикальные направляющие колонки 6,
Выходной элемент привода 5 соединен шарнирно с кареткой 7 посредством пальца 8. Каретка 7 может переме щаться в горизонтальной плоскости по направляющим 9, которые, в свою очередь, могут перемещаться в вертикальной плоскости по колонкам 6. На каретке закреплен кронштейн 10, па котором монтируются две пары пластин П и 2, образующих ячейки для уклад ки обрабатываемой детали в виде призм, и габаритные планки 13, закрепленные на кронштейне с возможностью регулировочного перемещения. К основанию корпуса промежуточного перегружателя прикреплены две основные планки 14 с копирными пазами, ко торые соединены между собой распорками 1 5.
Механизм -регулировки относительного положения ячеек состоит из двух дополнительных планок 16 и 17 с копирными пазами, шарнирно установленных на одной из основных планок 14 и подпружиненных относительно последней посредством возвратных пружин 18, упоров 19, подпружиненно354462
го фиксатора 20 и ограничительной планки 21.
Ос1юв 1ые планки 14 /-образ- ньгй копирный паз, в котором расположен палец. Одна из дополнительных планок 16 имеет копирный паз, который не препятствует прохождению пальца по левой ветви V-образного ко1Q пирного паза основной планки и пере- крьша ет проход по правой ветви, а дополнительная планка-17 симметрична дополнительной планке 16 и не препятствует прохождению пальца по пра15 вой ветви /-образного копирного паза, а перекрывает проход по левой ветви. Промьпчленный робот работает следующим о б р а 3 ом .
При подаче воздуха во внештоковую
20 полость привода (силового цилиндра) 5 шток воздействует на палец 8, ко- |Торьй совер чает сложное движение по ;одной из (левой или правой ) ветви ко- Дирных пазов основных планок 14.
25 Палец 8 соединен с кареткой 7.Вследствие того, что каретка 7 имеет возможность горизонтального перемещения по направляющим 9, которые, в свою очередь, могут перемещаться 30 вертикально по колонкам 6, она повторяет движение пальца по копирным пазам планок. В результате ось одной пары ячеек пластин совмещается с осью схвата робота. При этом робот может взять из ячейки или уложить туда же предназначенную деталь.
При следующем подъеме штока цилиндра с осью схвата робота совме- щается ось другой пары ячеек. Ячейки в виде призм образуются двумя парами пластин 11 -л 12. При взаимно противоположном перемещении пластин размеры ячеек изменяются в зависимости от диаметральных размеров деталей, при этом расстояние между центрами деталей и высота их центров не меняются. В зависимости от конфигурации деталей ячейки могут перемещаться относительно друг друга.
На одной из основных планок 14 мо.нтируется механизм регулировки относительного положения ячеек, который работает следующим образом.
Обозначим через А.Б,ВэГ,Д точки траектории копира, через Е,Ж,35И, К,Л,М - точки центров, образующие правую ветвь копира (ЛГД }, а через Е,Ж,3 ,И ,К ,Л ,М - точки центров, образующие левую ветвь копира (АБВ),
35
Ю
45
50
55
О - точка, вокруг которой происходит -качание основных планок.
На фиг.4 показано положение, когда дополнительная планка Е,Ж,3, И,К,Л,М не взаимодействует с фиксатором и под действием пружины вьше- дена в крайнее левое положение до упора. Своим профилем дополнительная планка Е,Ж,3,И,К,Л,М перекрывает проход пальца по правой ветви (АГД копира, а с левой ветвью (АБВ ) образует клии. Дополнительная планка Е,Ж 3,И ,К ,Л ,М зафиксирована и находится в среднем положении, которое не может препятствовать проходу . пальца по всему профилю копира А,Б,В,Г,Д.
При движении штока цилиндра вверх палец 8, двигаясь по ветви АБВ, выжимает образовавшийся клин между профилем левой ветки копира АБВ и дополнительной планки Е,Ж, 3,И,К,Л,М, в результате чего основные планки поворачиваются вокруг точки О до среднего положения. На участке БВ своего движения копир- ный палец воздействует на плечо фиксатора, расфиксирует дополнительную планку ЕЖЗ И К Л М и фиксирует до- полнительную планку ЕЖЗИКЛМ.
При ходе штока цилиндра вниз палец возвращается в исходное положение , а дополнительная планка ЕЖЗ И К Л М под действием пружины перебрасывается в крайнее правое положение до упора. При следующем движении поршня вверх палец двигается по правой ветви (АГД ) копирного паза.
Формула изобретения
Промьтшенный робот, содержащий механическую руку с захватной головкой и промежуточньй перегружатель с ячейками для деталей, корпус которого установлен на одной из подвижных частей механической руки, а также привод перемещения ячеек, отличающийся тем, что, с целью распшрения технологических возможнос - тей за счет работы с деталями в широком диапазоне размеров, промежуточный перегружатель снабжен кареткой, установленной с возможностью горизонтального и вертикального перемещений в направляющих корпуса, двумя основными планками, закрепленными на основании корпуса и имеющими копир- ные пазы, пальцем, шарнирно связан ным с выходным элементом привода и размещенным в копирных пазах основных планок, при этом ячейки перегружателя вьшрлнены в виде двух пар пластин, образующих призмы, и габаритных планок, закрепленных соответственно на кронштейне с возможностью регулировочного перемещения, а кронштейн жестко связан с кареткой, при этом промежуточный перегружатель снабжен механизмом регулировки относительного положения ячеек, имеющим две дополнительные планки с ко- пирными пазами, установленными шарнирно и подпружиненно относительно одной из основных планок с возможностью поочередного закрытия одной из ветвей копирного паза этих планок и последующей фиксации ограничительной планки.
ЕЭФи.5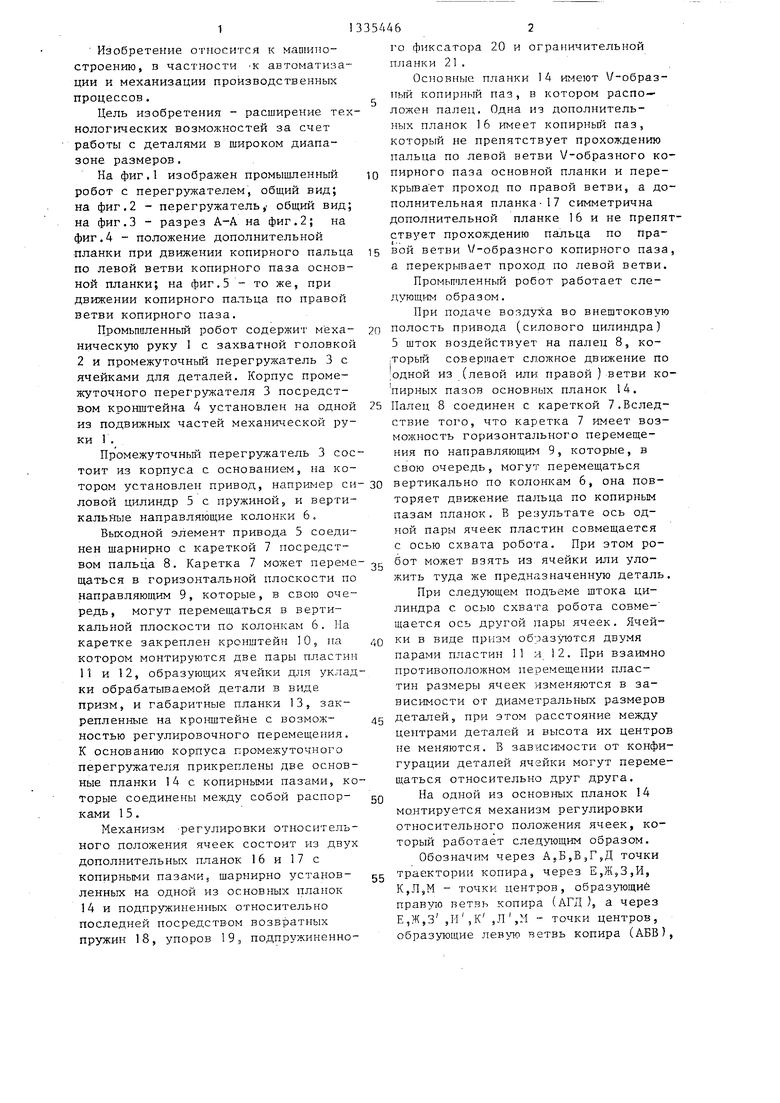
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Грейферное устройство для перемещения заготовок между рабочими позициями многопозиционного пресса | 1986 |
|
SU1484415A1 |
| Шагающий конвейер | 1981 |
|
SU988690A1 |
| Станок для растяжки сотового заполнителя | 1986 |
|
SU1433601A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
Изобретение относится к области машиностроения, в частности к автоматизации и механизации производственных процессов. Целью изобретения является расширение технологических возможностей за счет работы с деталями в широком диапазоне размеров. Для этого на механической руке установлен промежуточный перегружатель с ячейками для деталей. На основании корпуса прикреплены две основные планки 14 с копирнымн пазами, а на каретке закреплен кронштейн, на котором монтируются две пары пластин, образующих ячейки для укладки деталей. При этом на одной из основных планок шарнирно установлены дополнительные планки 16 и 17 механизма регулировки относительного положения ячеек. Дополнительные планки имеют копирный паз, который не препятству- ет прохождению пальца сбответственно по левой или правой ветви V-образ- ного копирного паза основных планок. В результате ось одной пары ячеек . пластин совмещается с осью захвата. 5 ил. i (Л Од 00 СП 4 4 в5
| Промышленный робот | 1973 |
|
SU506496A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
