Изобретение относится к подъемно- транспортному машиностроению, а именно к самоходным манипуляторам для крупногабаритных изделий, преимущественно для технологических линий изготовления железобетонных изделий типа опор ЛЭП.
Цель изобретения - повышение надежности работы с большегрузными изделиями .
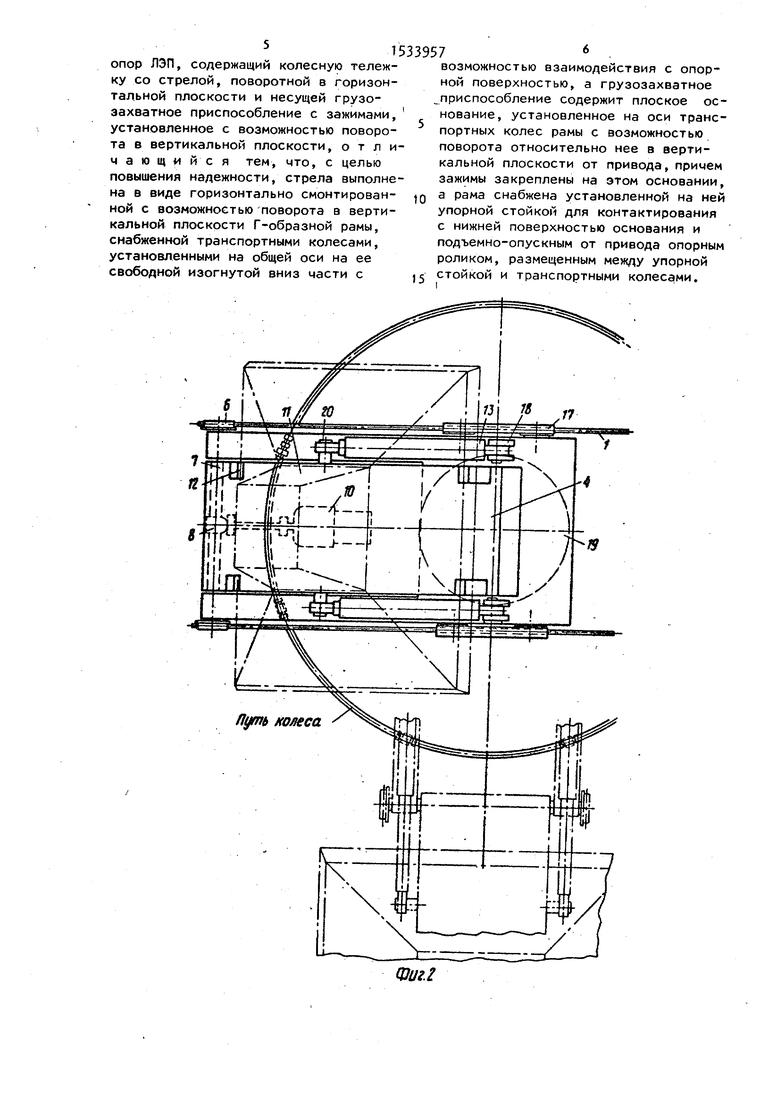
На фиг. 1 изображен предлагаемый самоходный манипулятор для крупногабаритных изделий, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - подъемно-транспортный ролик с силовым цилиндром; на фиг. U - технологическая схема постов для манипулятора.
Самоходный манипулятор для крупно- габаритных изделий, преимущественно для технологических линий изготовления железобетонных изделий типа опор ЛЭП, состоит из установленной на рельсовом
о
5
аппаратура 19 управления работой манипулятором.
Основание связано боковыми сторонами посредством цапф 20 с силовыми цилиндрами 13, но может быть связано и внутренней стороной.
Самоходный манипулятор для крупногабаритных изделий работает следующим образом.
Манипулятор по рельсовому пути 1 подъезжает к посту загрузки изделия 11. В зависимости от положения последнего основание 4 при помощи силовых цилиндров 13 принимает заданное положение, т.е. своей наружной поверхностью плотно соприкасается с поверхностью изделия 11. После этого изделие 11 фиксируется выдвижными зажимами 12 и таким образом осуществляется его захват, а затем Поворот 11 в вертикальной плоскости помощью силовых цилиндров 13 до посадки упора 16 на упорную
изделия на 90° с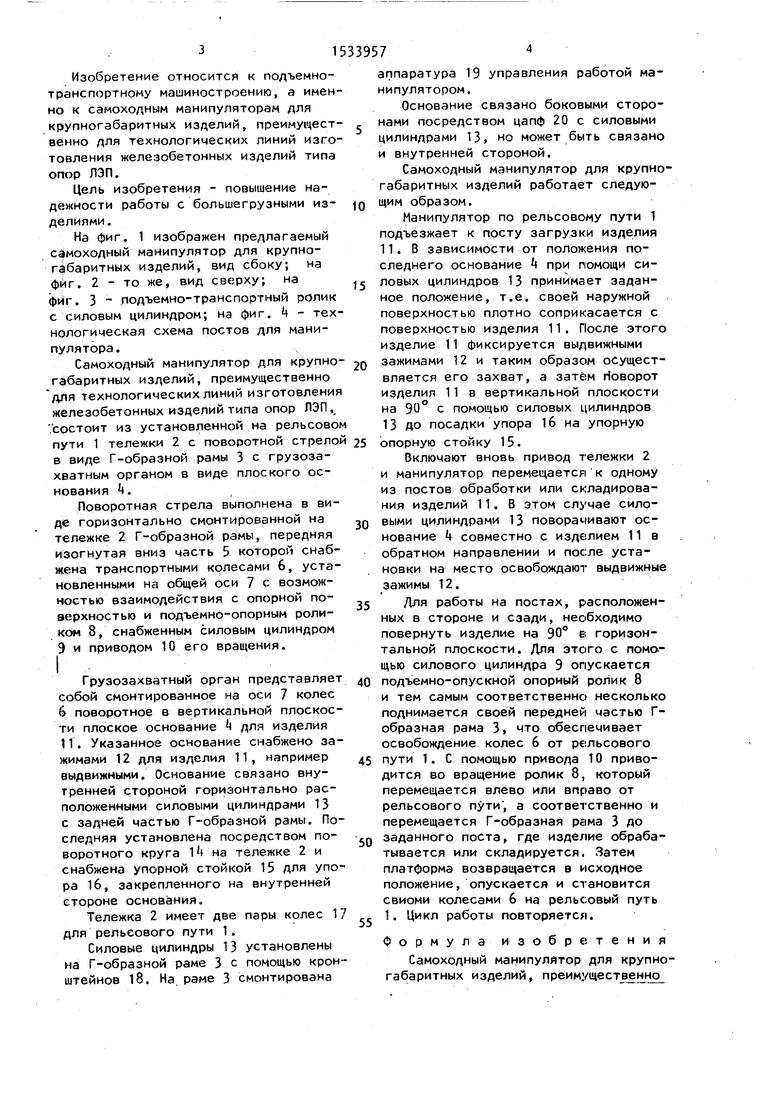
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ МАЛЫХ ЖЕЛЕЗОБЕТОННЫХ И БЕТОННЫХ ИЗДЕЛИЙ | 1991 |
|
RU2015010C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ДВУХЪЯРУСНЫЙ СТАН для ИЗГОТОВЛЕНИЯ ЖЕЛЕЗОБЕТОННЫХ НЗДЕЛИЙВСЕСОЮЗНАЯliAKHTBO^T^KliH'infAfБИБЛИОТЕКА | 1971 |
|
SU306002A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Установка для резки листового материала | 1986 |
|
SU1369876A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
Изобретение относится к самоходным манипуляторам для крупногабаритных изделий, преимущественно для опор ЛЭП. Цель изобретения - повышение надежности. Манипулятор имеет возможность подъехать к посту загрузки изделия и в зависимости от положения последнего основание 4 при помощи силовых цилиндров поворачивается в вертикальной плоскости и своей наружной поверхностью плотно соприкасается с поверхностью изделия 11. После этого изделие фиксируется зажимами 12, а затем поворачивается с основанием 4 в вертикальной плоскости до посадки упора 16 на упорную стойку 15. После включения привода тележка перемещается к посту разгрузки, где основание поворачивается силовыми цилиндрами 13 в обратном направлении и после установки на место освобождаются зажимы 12. Для работы манипулятора на постах, расположенных в стороне от рельсового пути, посредством привода опорный ролик 8 опускается и Г-образная рама несколько поворачивается в вертикальной плоскости относительно места крепления ее к поворотно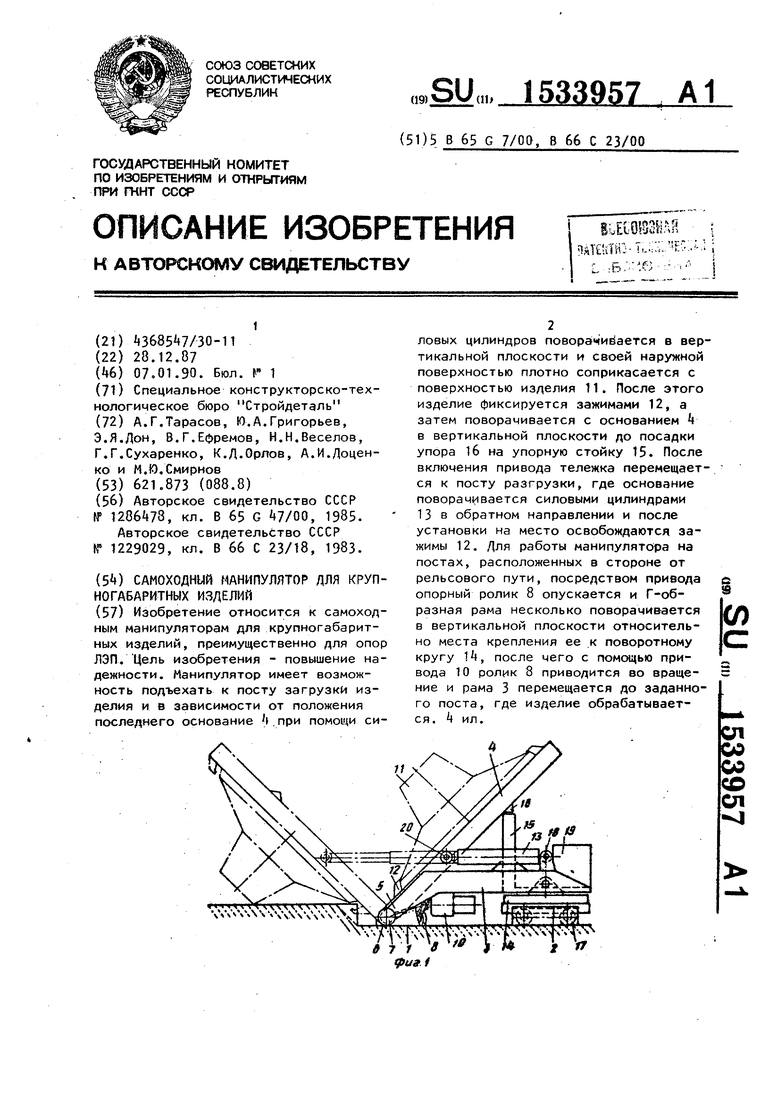
пути 1 тележки 2 с поворотной стрелой 25 опорную стойку 15.
в виде Г-образной рамы 3 с грузозахватным органом в виде плоского основания .
Поворотная стрела выполнена в виде горизонтально смонтированной на тележке 2 Г-образной рамы, передняя изогнутая вниз часть 5 которой снабжена транспортными колесами 6, установленными на общей оси 7 с возможностью взаимодействия с опорной поверхностью и подъемно-опорным роликом 8, снабженным силовым цилиндром 9 и приводом 10 его вращения.
I
Грузозахватный орган представляет
собой смонтированное на оси 7 колес 6 поворотное в вертикальной плоскости плоское основание k для изделия 11. Указанное основание снабжено зажимами 12 для изделия 11, например выдвижными. Основание связано внутренней стороной горизонтально расположенными силовыми цилиндрами 13 с задней частью Г-образной рамы. Последняя установлена посредством поворотного круга 1 на тележке 2 и снабжена упорной стойкой 15 для упора 16, закрепленного на внутренней стороне основания.
Тележка 2 имеет две пары колес 17 для рельсового пути 1.
Силовые цилиндры 13 установлены на Г-образной раме 3 с помощью кронштейнов 18. На раме 3 смонтирована
Включают вновь п и манипулятор перем из постов обработки ния изделий 11. В э
Зо выми цилиндрами 13 нование Ц совместно обратном направлени новки на место осво зажимы 12.
35 Для работы на по ных в стороне и сза повернуть изделие н тальной плоскости. щью силового цилинд
40 подъемно-опускной о и тем самым соответ поднимается своей п образная рама 3t чт освобождение колес
45 пути 1. С помощью п дится во вращение р перемещается влево рельсового пути, а перемещается Г-обра
50 заданного поста, гд тывается или склади платформа возвращае положение, опускает свиоми колесами 6 н 1. Цикл работы повт
55
Формула из
Самоходный манип габаритных изделий,
Включают вновь привод тележки 2 и манипулятор перемещается к одному из постов обработки или складирования изделий 11. В этом случае силовыми цилиндрами 13 поворачивают основание Ц совместно с изделием 11 в обратном направлении и после установки на место освобождают выдвижные зажимы 12.
Для работы на постах, расположенных в стороне и сзади, необходимо повернуть изделие на 90° в горизонтальной плоскости. Для этого с помощью силового цилиндра 9 опускается
подъемно-опускной опорный ролик 8 и тем самым соответственно несколько поднимается своей передней частью Г- образная рама 3t что обеспечивает освобождение колес 6 от рельсового
пути 1. С помощью привода 10 приводится во вращение ролик 8, который перемещается влево или вправо от рельсового пути, а соответственно и перемещается Г-образная рама 3 до
заданного поста, где изделие обрабатывается или складируется. Затем платформа возвращается в исходное положение, опускается и становится свиоми колесами 6 на рельсовый путь 1. Цикл работы повторяется.
Формула изобретения
Самоходный манипулятор для крупногабаритных изделий, преимущественно
опор ЛЭП, содержащий колесную тележку со стрелой, поворотной в горизонтальной плоскости и несущей грузозахватное приспособление с зажимами, установленное с возможностью поворота в вертикальной плоскости, отличающийся тем, что, с целью повышения надежности, стрела выполнена в виде горизонтально смонтированной с возможностью поворота в вертикальной плоскости Г-образной рамы, снабженной транспортными колесами, установленными на общей оси на ее свободной изогнутой вниз части с
возможностью взаимодействия с опорной поверхностью, а грузозахватное приспособление содержит плоское основание, установленное на оси транспортных колес рамы с возможностью поворота относительно нее в вертикальной плоскости от привода, причем зажимы закреплены на этом основании, а рама снабжена установленной на ней упорной стойкой для контактирования с нижней поверхностью основания и подъемно-опускным от привода опорным роликом, размещенным между упорной стойкой и транспортными колесами.
Фиг.э
N
1--rt Ут-Г-я
.--ЦзО L-tfjiJL J
Фиг. 4
| Авторское свидетельство СССР N° , кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Самоходный манипулятор для погрузочно-разгрузочных работ | 1983 |
|
SU1229029A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| ( САМОХОДНЫЙ МАНИПУЛЯТОР ДЛЯ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | |||
