ти управления ориентацией груза.
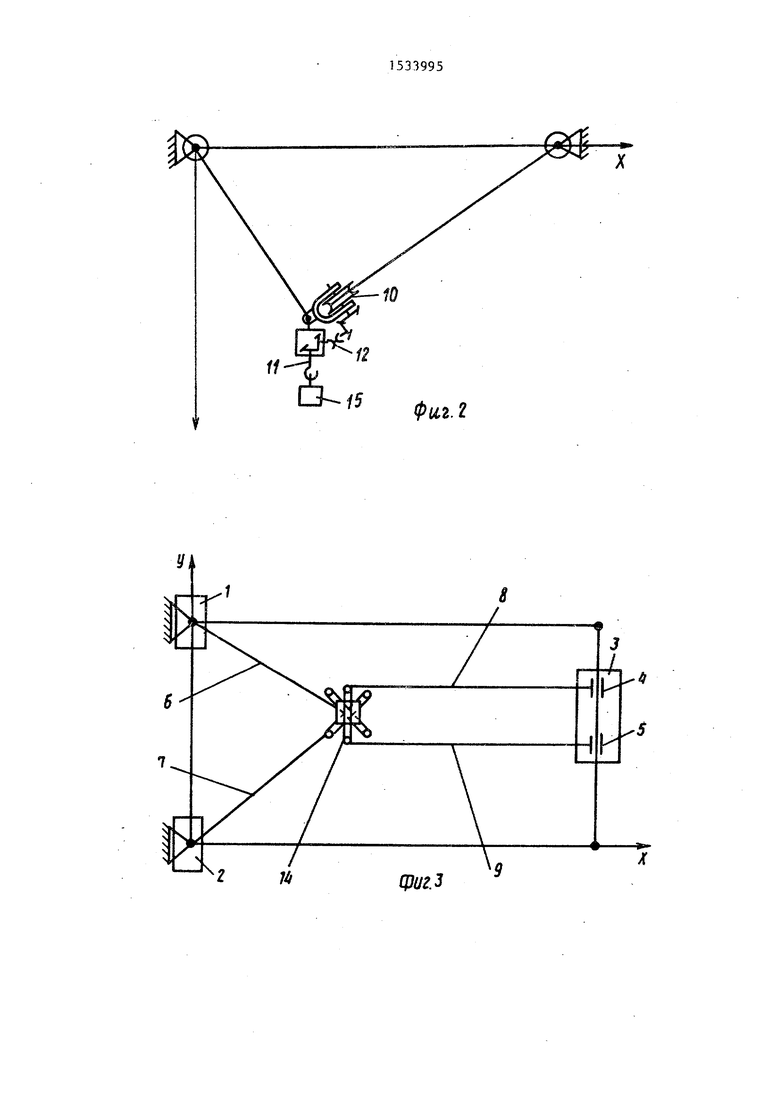
На фиг.1 изображена схема подъемно-тяговой системы, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З - схема подъемно-тяговой системы с гру- зонесущей подвеской, выполненнрй в виде траверс; на фиг.А - то же, с одинарным тросом подвижного привода.
Подъемно-тяговая система содержит два неподвижных (стационарных) при- вода 1 и 2, подвижный привод 3, имеющий два барабана 4 и 5, гибкие гру- зонесущие элементы - тросы 6 и 7 стационарных приводов, гибкий грузонесу- щий элемент подвижного привода 3, состоящий из прямой и обратной ветвей - тросов 8 и 9, проходящих через блок 10 груэонесущей подвески. Блок 10 кинематически связан с захватным усттацию грузонесущей подвески независимо, от положения груза в пространстве, траектории и скорости его перемещения.
Для изменения ориентации груза осуществляется, например, соответственно прямое и обратное вращение барабанов 4 и 5 на определенный угол,, При этом происходит поворот блока 10 посредством передачи, например карданной 12 или в виде гибкого вала, непосредственно захватного устройств 1 1 с грузом 15.
При выполнении грузонесущей подвеки в виде траверсы 14 ее поворот при изменении длины тросов (ветвей) 8 и 9 может осуществляться в пределах от t 90°. что в
ряде случаев является
достаточным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ленточный конвейер | 1986 |
|
SU1528703A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Шаговый механизм для перемещения груза | 1990 |
|
SU1742200A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1247321A1 |
| Крутонаклонный ленточный магнитный конвейер для транспортирования ферромагнитных грузов | 1986 |
|
SU1411227A1 |
| Устройство для перемещения грузов | 1986 |
|
SU1507683A1 |
| Грузоподъемное устройство | 1989 |
|
SU1710493A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2176011C2 |

Изобретение относится к машиностроению, в частности к подъемно-транспортному оборудованию, и может быть использовано в различных отраслях народного хозяйства. Цель изобретения - расширение зоны обслуживания и обеспечение возможности управления ориентацией груза. Подъемно-тяговая система содержит два неподвижных привода 1 и 2, подвижный привод 3, имеющий два барабана 4 и 5, гибкие грузонесущие элементы - тросы 6 и 7, гибкий несущий элемент подвижного привода 3, состоящий из прямой и обратной ветвей - тросов 8 и 9, проходящих через блок 10 грузонесущей подвески. Блок 10 связан с захватным устройством посредством корданной передачи. Привод 3 установлен на направляющей 13 и имеет возможность перемещения вдоль него. 4 ил.
посредством карданной пе-
ройством 11 редачи 12.
Привод 3 установлен на направляющей 13 и имеет возможность перемещения вдоль нее.
Грузонесущая подвеска может быть выполнена в виде траверсы 14. Груз 15 крепится на захватном устройстве П.
Исполнение подъемно-тяговой систе
45
мы возможно с одним барабаном и соот- 40 обеспечения возможности управления ветственно одним тросом 16 подвижного привода 3. Такая схема обеспечивает постоянную ориентацию груза, но не позволяет управлять ею.
Подъемно-тяговая система работает следующим образом.
При изменении длины тросов 6-9 при помощи приводов 1-3 осуществляется перемещение груза 15 в координатах X, YHZ, При этом привод 3 перемещается вдоль направляющей 13 так, что между направляющей и тросами 8 и 9 сохраняется прямой угол. Это может обеспечиваться свободным перемещением привода 3 за счет возникновения горизонтальной составляющей (вдоль оси Y) от массы груза при его перемещении в пространстве, вызывающем отклонение указанного угла от 90°. При необхо50
55
ориентацией груза, один из приводов установлен с возможностью горизонтального перемещения и снабжен двумя барабанами, а гибкий элемент, связанный с ним, закреплен своими концами на упомянутых барабанах и огибает установленный на грузонесущей подвеске блок, который кинематически связан с захватным устройст вом, установленным с возможностью вращения относительно вертикальной оси„
Формула изобретения
1, Подъемно-тяговая система, содержащая по крайней мере три привода с гибкими элементами, связанными с грузонесущей подвеской, и соединенное с последней захватное устройство, отличающаяся тем, что, с целью расширения зоны обслуживания и
обеспечения возможности управления
ориентацией груза, один из приводов установлен с возможностью горизонтального перемещения и снабжен двумя барабанами, а гибкий элемент, связанный с ним, закреплен своими концами на упомянутых барабанах и огибает установленный на грузонесущей подвеске блок, который кинематически связан с захватным устройством, установленным с возможностью вращения относительно вертикальной оси„
15
фиг. 2
8
/
-L k
К
фиг.з
4
яг
L/
Фиг. Ь
-Ч
| Робототехника | |||
| Экспресс-информация, 1986, Я- 36, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
