чатых колпачков, поступающие по под- Водящему лотку 2 непрерывным потоком и неориентированном поло«ении, имеют Возможность сцепляться между собой Для принудительного рассоединения де- Талей при поштучной выдачи их в механизм ориентации ролики 3 и 4, поочередно вращаясь то навстречу друг другу, то в противоположном друг от дрЗ-ta направлении, используя холостой и рабочий ход привода механизма Ориентации, обеспечивают вначале раз
мещение двух деталей между собой, затем их рассоединение, а потом поштучную выдачу нижней из них в гнездо механизма ориентации. В результате ориентации механизм ориентации детали в стро го заданном положении поступают в рабочую зону технологичес-, кого оборудования. Кинематическая связь роликов 3 и 4 с приводом механизма ориентации позволяет производить изменение угла их поворота при наладке. 5 ил.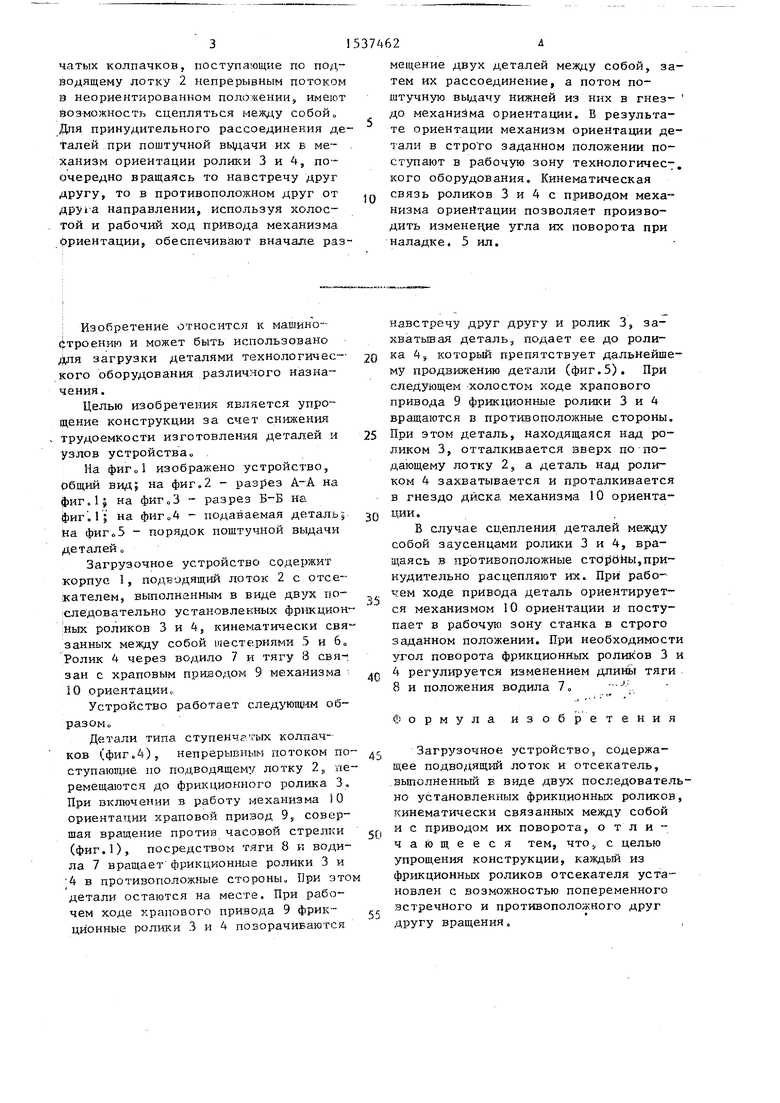
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1468710A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1337244A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Шлифовальный станок | 1980 |
|
SU903082A1 |
| Загрузочное устройство | 1989 |
|
SU1798111A1 |
| Устройство для ориентирования деталей | 1976 |
|
SU654389A1 |
| Устройство для поштучной выдачидЕТАлЕй | 1979 |
|
SU841913A1 |
| Устройство для ориентированной подачи заготовок | 1986 |
|
SU1393583A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙИЗ степь? | 1971 |
|
SU423714A1 |
| Устройство для ориентации и поштучной выдачи деталей при выгрузке их из бункера | 1986 |
|
SU1390150A1 |
Изобретение относится к машиностроению и может быть использовано для загрузки деталями технологического оборудования различного назначения. Целью изобретения является упрощение конструкции за счет снижения трудоемкости изготовления деталей и узлов устройства. Детали типа ступенчатых колпачков, поступающие по подводящему лотку 2 непрерывным потоком в неориентированном положении, имеют возможность сцепляться между собой. Для принудительного рассоединения деталей при поштучной выдачи их в механизм ориентации ролики 3 и 4, поочередно вращаясь то навстречу друг другу, то в противоположном друг от друга направлении, используя холостой и рабочий ход привода механизма ориентации, обеспечивают вначале размещение двух деталей между собой, затем их рассоединение, а потом поштучную выдачу нижней из них в гнездо механизма ориентации. В результате ориентации механизм ориентации детали в строго заданном положении поступают в рабочую зону технологического оборудования. Кинематическая связь роликов 3 и 4 с приводом механизма ориентации позволяет производить изменение угла их поворота при наладке. 5 ил.
Изобретение относится к машино- с троению и может быть использовано для загрузки деталями технологического оборудования различного назначения.
Целью изобретения является упрощение конструкции за счет снижения трудоемкости изготовления деталей и УЗЛОВ устройства
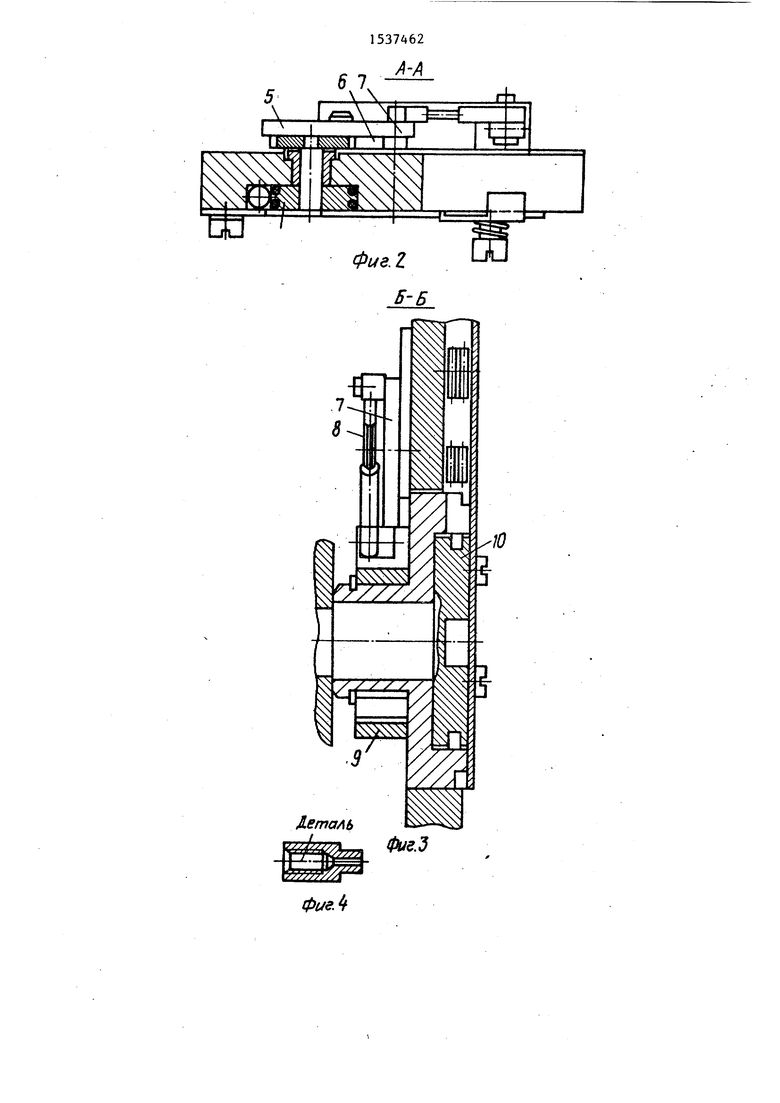
На фиг01 изображено устройство, Общий вид; на фиг.2 - разрез А-А на фиг Л; на фигоЗ - разрез Б-Б на фиг . Г; на фиг о А - подаваемая деталь 5 на фиг„5 - порядок поштучной выдачи деталей„
Загрузочное устройство содержит корпус 1, подводящий лоток 2 с отсе- кателем, выполненным в виде двух последовательно установленных фрикционных роликов 3 и 4, кинематически связанных между собой шестернями 5 и 6„ Ролик 4 через водило 7 и тягу В ев я- зан с храповым приводом 9 механизма 10 ориентации.,
Устройство работает следующим образом
Детали типа ступенчртых колпачков (фиг.А), непрерывным потоком поступающие по подводящему лотку 2Э перемещаются до фрикционного ролика 3, При включении в работу механизма 10 ориентации храповой привод 9, совершая вращение против часовой стрелки (фиг.1), посредством тяги 8 к водила 7 вращает фрикционные ролики 3 и ;4 в противоположные стороны. При это детали остаются на месте. При рабочем ходе храпового привода 9 фрикционные ролики 3 и 4 поворачиваются
5
D
навстречу друг другу и ролик 3, захватывая деталь3 подает ее до роли- Q ка 4, который препятствует дальнейшему продвижению детали (фиг.5). При следующем холостом ходе храпового привода 9 фрикционные ролики 3 и А вращаются в противоположные стороны. При этом деталь, находящаяся над роликом 3, отталкивается вверх по подающему лотку 2S а деталь над роликом 4 захватывается и проталкивается в гнездо дйскз механизма 10 ориентации.
В случае сцепления деталей между собой заусенцами ролики 3 и А, вращаясь в противоположные стопины,принудительно расцепляют их. При рабо- ем ходе привода деталь ориентируется механизмом 10 ориентации и поступает в рабочую зону станка в строго заданном положении. При необходимости угол поворота фрикционных роликов 3 и А регулируется изменением длины тяги 8 и положения водила 7. J
0
Формула изобретения
Загрузочное устройство, содержащее подводящий лоток и отсекатель, выполненный в виде двух последовательно установленных фрикционных роликов, кинематически связанных между собой и с, приводом их поворота, отличающееся тем, что, с целью упрощения конструкции, каждый из фрикционных роликов отсекателя установлен с возможностью попеременного .встречного и противоположного друг другу вращения.
0
5
CN vO 3r.
СЛ
m
tr
I
ВИтЙ/2
/ . У
Фие.5
