Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и предназначено для захвата и перемещения заготовок типа валов.
Цель изобретения - расширение технологических возможностей путем увеличения диапазона захватываемых деталей типа валов и надежность захвата ю деталей при кантовании в вертикальной плоскости.
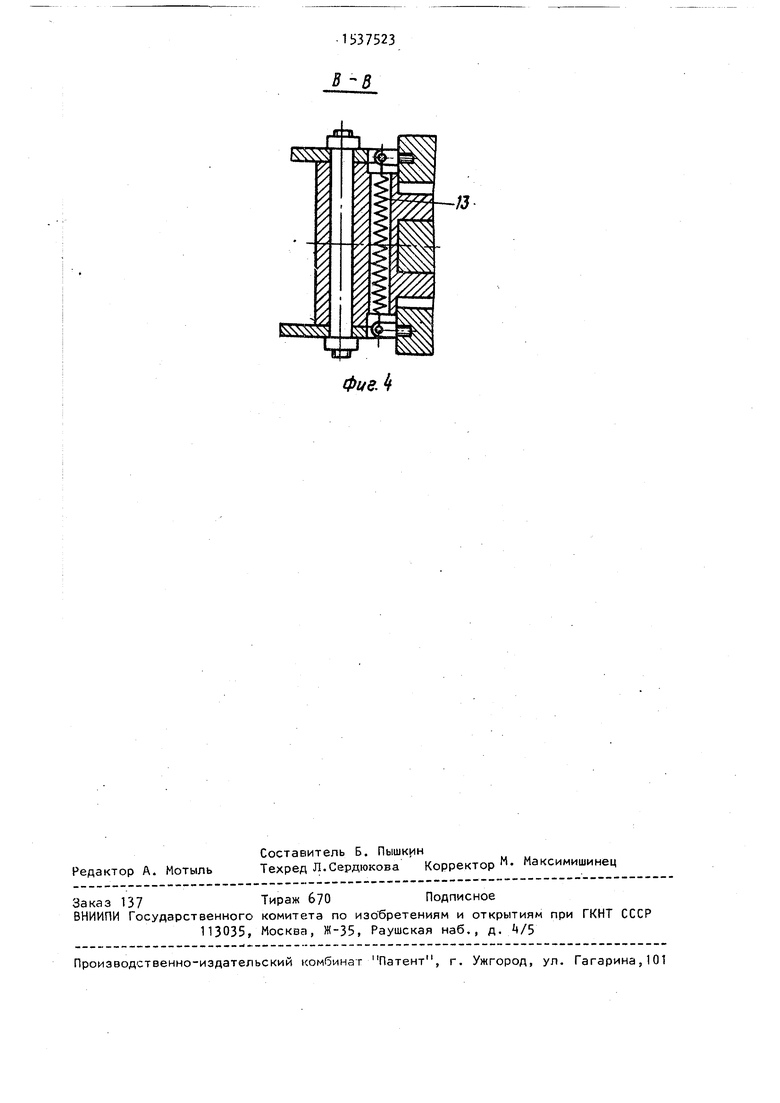
На фиг. 1 представлен захват манипулятора, общий вид; на фиг. 2 - разрез Й-А на фиг. 1; на фиг. 3 раз- is рез В-Ь на фиг. 2; на фиг. k - разрез В-В на фиг с 1.
Захват манипулятора содержит кор- |пус 1, на котором шарнирно установлены зажимные рычаги 2, расположенный 20 между ними упор 3 выполненный из двух частей с контактирующей поверхностью , имеющей двусторонний равномерный уклон к оси захвата, при этом одна часть упора 3 выполнена в виде призмы 5 и имеет возможность самоустановки относительно захватываемой детали, другая часть 6 контактирует с образующей поверхностью среднего кулачка / и кулачковый механизм 8, выполненный из трех кулачков - крайних Э и среднего 7, установленных на общей оси Ю. Упор 3 подпружинен с помощью пружин 11 к среднему кулачку
1$375234
мощью рукоятки 16 и штурвала 17 осуществляют зажим детали 18 над центром масс. Вращение штурвала 17 позволяет осуществлять совместное и равномерное сближение двух зажимных рычагов 2 и упора 3, что обеспечивает постоянство центрирования деталей различных диаметров.
Для кантования детали в вертикальной плоскости с поворотом на 30° необходимо после небольшого подъема повернуть за рукоятку 16 корпус 1 захвата в вертикальной плоскости, при этом дуговые пазы б обкатываются по роликам 15 манипулятора. Призма 5 упора 3, плотно прижатая к детали 18 в момент зажима, в процессе кантования при необходимости заклинивает деталь 18 от осевого перемещения.
Освобождение детали 18 после установки в вертикальное положение осуществляется вращением штурвала 17 в об- 25 ратную сторону. После обработки детали захват и перемещение ее в горизонтальное положение осуществляют в обратной последовательности.
30
Формула изобретения
Захват манипулятора, содержаний корпус, на котором шарнирно установлены зажимные рычаги, расположенный
Для кантования детали в вертикальной плоскости с поворотом на 30° необходимо после небольшого подъема повернуть за рукоятку 16 корпус 1 захвата в вертикальной плоскости, при этом дуговые пазы б обкатываются по роликам 15 манипулятора. Призма 5 упора 3, плотно прижатая к детали 18 в момент зажима, в процессе кантования при необходимости заклинивает деталь 18 от осевого перемещения.
Освобождение детали 18 после установки в вертикальное положение осуществляется вращением штурвала 17 в об- 5 ратную сторону. После обработки детали захват и перемещение ее в горизонтальное положение осуществляют в обратной последовательности.
Формула изобретения
Захват манипулятора, содержаний корпус, на котором шарнирно установлены зажимные рычаги, расположенный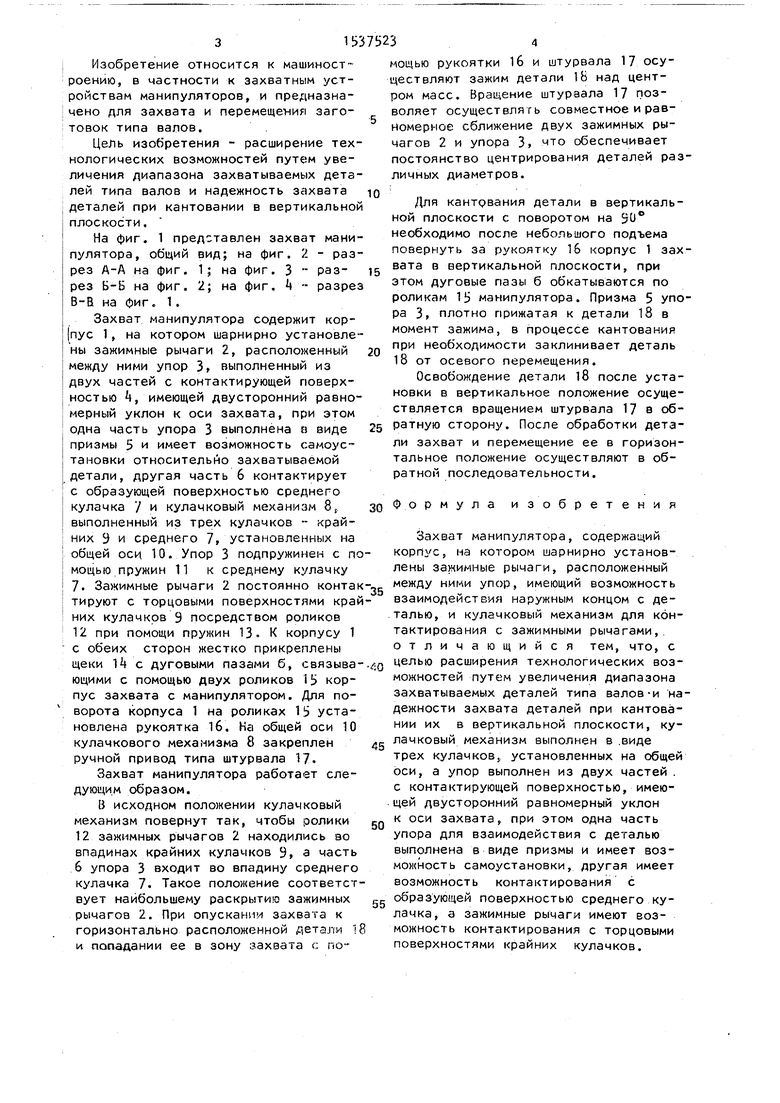
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1511114A1 |
| Устройство для кантования деталей | 1976 |
|
SU618250A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Устройство для ориентированной подачи деталей | 1987 |
|
SU1530410A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Способ установки деталей и устройство для его осуществления | 1988 |
|
SU1577936A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ГИБКИ | 1996 |
|
RU2101113C1 |
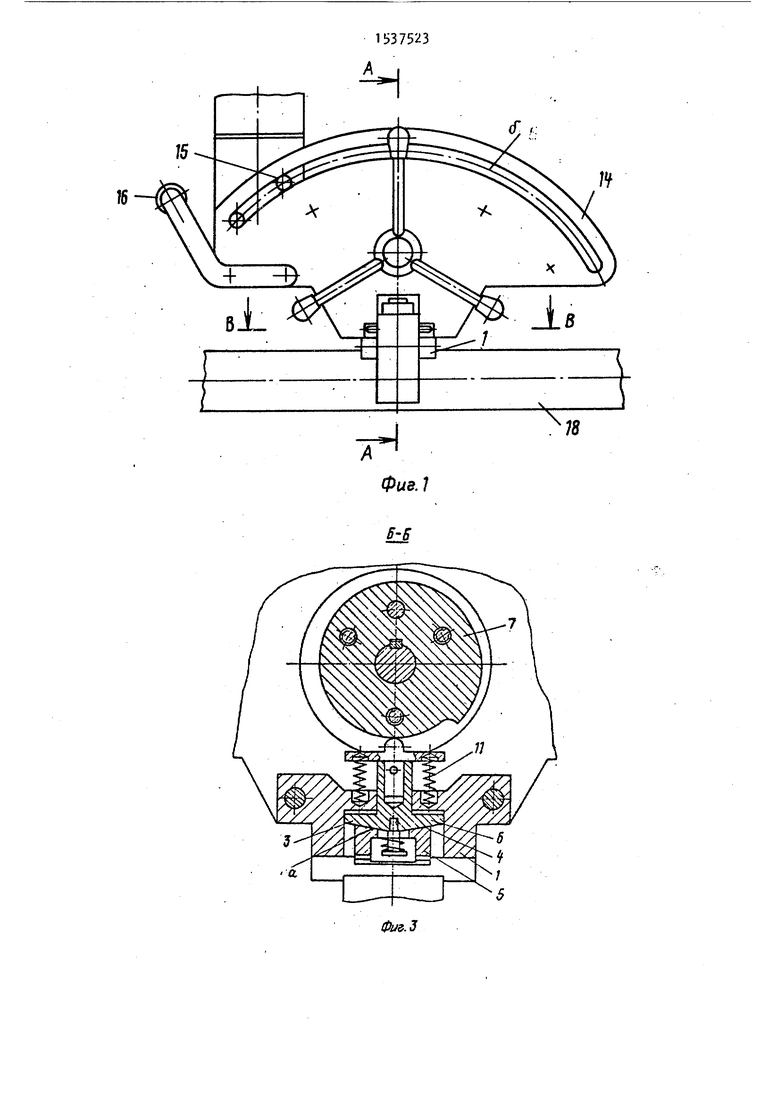
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и предназначено для захвата и перемещения заготовки типа валов. Цель изобретения - расширение технологических возможностей путем увеличения диапазона захватываемых деталей типа валов и надежность захвата деталей при кантовании их в вертикальной плоскости. Захват содержит корпус, зажимные рычаги 2, упор, выполненный из двух частей, контактирующих с поверхностью 4, имеющей двусторонний равномерный уклон к оси захвата, одна часть упора выполнена в виде призмы 5 и имеет возможность самоустановки относительно захватываемой детали, другая часть 6 контактирует с образующей поверхностью среднего кулачка 7, и кулачковый механизм 8, выполненный из трех булатов-крайних 9 и среднего 7-, установленных на общей оси 10. При вращении штурвала 17, расположенного на общей оси 10, вращается кулачковый механизм 8, и зажимные рычаги 2 с упором, равномерно сближаясь, захватывают деталь 18. 4 ил.
взаимодействия наружным к талью, и кулачковый механ тактирования с зажимными отличающийся
тируют с торцовыми поверхностями крайних кулачков 9 посредством роликов 12 при помощи пружин 13. К корпусу 1 с обеих сторон жестко прикреплены
щеки 14 с дуговыми пазами б, связыва-.ед Цельк расширения технологических воз- ющими с помощью двух роликов $ корпус захвата с манипулятором. Для поворота корпуса 1 на роликах 15 установлена рукоятка 16. На общей оси 10 кулачкового механизма 8 закреплен ручной привод типа штурвала 17.
Захват манипулятора работает следующим образом.
В исходном положении кулачковый механизм повернут так, чтобы ролики 12 зажимных рычагов 2 находились во впадинах крайних кулачков 9, а часть 6 упора 3 входит во впадину среднего кулачка 7. Такое положение соответствует наибольшему раскрытию зажимных рычагов 2. При опускания захвата к горизонтально расположенной детали 18 и попадании ее в зону захвата с поможностеи путем увеличения диапазона захватываемых деталей типа валов-и надежности захвата деталей при кантовании их в вертикальной плоскости, ку-5 лачковый механизм выполнен в .виде трех кулачков,, установленных на общей оси, а упор выполнен из двух частей . с контактирующей поверхностью, имеющей двусторонний равномерный уклон к оси захвата, при этом одна часть упора для взаимодействия с деталью выполнена в виде призмы и имеет возможность самоустановки, другая имеет возможность контактирования с
gg образующей поверхностью среднего кулачка, а зажимные рычаги имеют возможность контактирования с торцовыми поверхностями крайних кулачков.
50
возможность
между ними упор, имеющий
взаимодействия наружным концом с деталью, и кулачковый механизм для контактирования с зажимными рычагами, отличающийся тем, что, с
Цельк расширения технологических воз-
можностеи путем увеличения диапазона захватываемых деталей типа валов-и надежности захвата деталей при кантовании их в вертикальной плоскости, кулачковый механизм выполнен в .виде трех кулачков,, установленных на общей оси, а упор выполнен из двух частей . с контактирующей поверхностью, имеющей двусторонний равномерный уклон к оси захвата, при этом одна часть упора для взаимодействия с деталью выполнена в виде призмы и имеет возможность самоустановки, другая имеет возможность контактирования с
образующей поверхностью среднего кулачка, а зажимные рычаги имеют возможность контактирования с торцовыми поверхностями крайних кулачков.
ы
Ъ
1 ВПф
ezszssi
ФцгЛ
