Фиг.1
Изобретение относится к подъемно- транспортному машиностроению, в частности к телескопическим захватам кра- нов-штабелеров, и может быть исполь- зовано в различных областях народного хозяйства, применяющих телескопические механизмы.
Цель изобретения - повышение надежности.
На фиг.1 изображен телескопический захват, вид сбоку; на фиг.2 - то же, с выдвинутыми платформами вправо; на фиг.З - то же, с выдвинутыми платформами влево.
Захват состоит из основания 1, на котором с возможностью возвратно-поступательного движения установлена средняя 2 и верхняя 3 выдвижные платформы, блоков 4 и 5, установленных на верхней платформе 3, блоков 6 и 7, установленных на средней платформе 2, приводных блоков (например, звездочек) 8 и 9, гибких тяговых органов (например, цепей) 10 и 11.
Телескопический захват работает следующим образом.
Для перемещения платформ 2 и 3 вправо подается синхронное вращение на1 приводные блоки 8 и 9, которые, (вращаясь в одну сторону и с одинако-; ,вой скоростью, перемещают гибкие тяговые органы 10 и 11, при этом длины ветвей а и б гибких тяговых органов 10 и 11 увеличиваются на величину и а длины ветвей виг уменьшают- ся на величину U. . В результате натяжения ветвей виг средняя платформа 2 выдвигается вправо на величину U а верхняя платформа 3 - на величину 2 & относительно основания 1.
Для перемещения платформ 2 и 3 влево вращение на приводные блоки 10 и 11 подается в обратную сторону, при этом на величину и, увеличиваются вет- ви в и г и уменьшаются ветви а и б,
0
5
натяжением которых средняя платформа 2 выдвигается влево на велчину &, а верхняя платформа 3 - на величину 2h относительно основания 1. Это соотношение сохраняется как во время выдвижения платформ, так и при их остановке, что позволяет одновременно выдвигать и фиксировать платформы в любой точке выдвижения захвата без применения каких-либо дополнительных устройств. Привод же отключается переключателями .
Формула изобретения
Телескопический захват, содержащий связанные с неподвижной секцией промежуточную и грузонесущую секции и механизм выдвижения двух последних, включающий в себя три пары блоков, блоки первой из которых по одному закреплены по концам неподвижной секции, блоки второй пары - на промежуточной секции, два гибких органа, огибающих блоки упомянутых пар с закреплением одного из них концами на промежуточной секции, и привод, смонтированный на неподвижной секции, отличающийся тем, что, с целью повышения надежности, блоки третьей пары по одному закреплены по концам грузонесущей секции, первый гибкий орган закреплен обоими концами на одном из из концов промежуточной секции и последовательно охватывает противолежащий блок на грузонесущей секции, блок, размещенный на упомянутом конце промежуточной секции, и противолежащий блок на неподвижной секции, второй гибкий орган обоими концами закреплен на другом конце промежуточной секции и последовательно охватывает другие аналогичные блоки всех секций, при этом привод кинематически соединен с обоими блоками неподвижной секции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Телескопический захват | 1986 |
|
SU1321644A1 |
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| Телескопический грузозахват Колосова | 1989 |
|
SU1664669A1 |
| Телескопический захват | 1987 |
|
SU1442471A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Телескопический захват | 1979 |
|
SU863510A1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА КРАНА | 1991 |
|
RU2025456C1 |
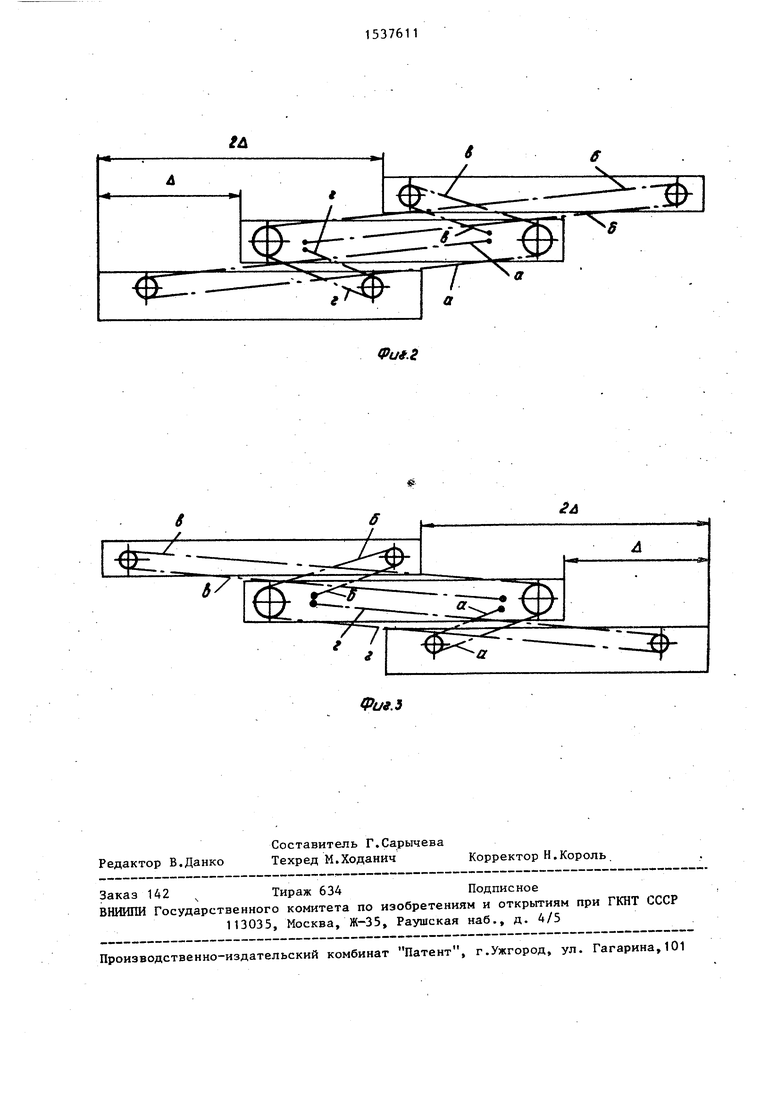
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение надежности. Телескопический захват состоит из основания 1, на котором установлены кинематически связанные между собой приводные блоки 8, 9, средний платформы 2, на которой установлены блоки 6, 7, верхней платформы 2, на которой установлены блоки 4, 5. Гибкий тяговый орган 10 охватывает блоки 3, 7 и блок 8, а концами закреплен к платформе 2. Гибкий тяговый орган 11 охватывает блоки 5, 6 и блок 9, а концами закреплен к платформе 2. Для перемещения платформ подается вращение на приводные блоки 8, 9, которые, вращаясь в одну сторону и с одинаковой скоростью, перемещают гибкие тяговые органы 10 и 11, за счет чего длины ветвей гибких тяговых органов 10, 11 изменяются и происходит выдвижение платформ вправо или влево в зависимости от направления вращения и ограничивается переключателями 12. 3 ил.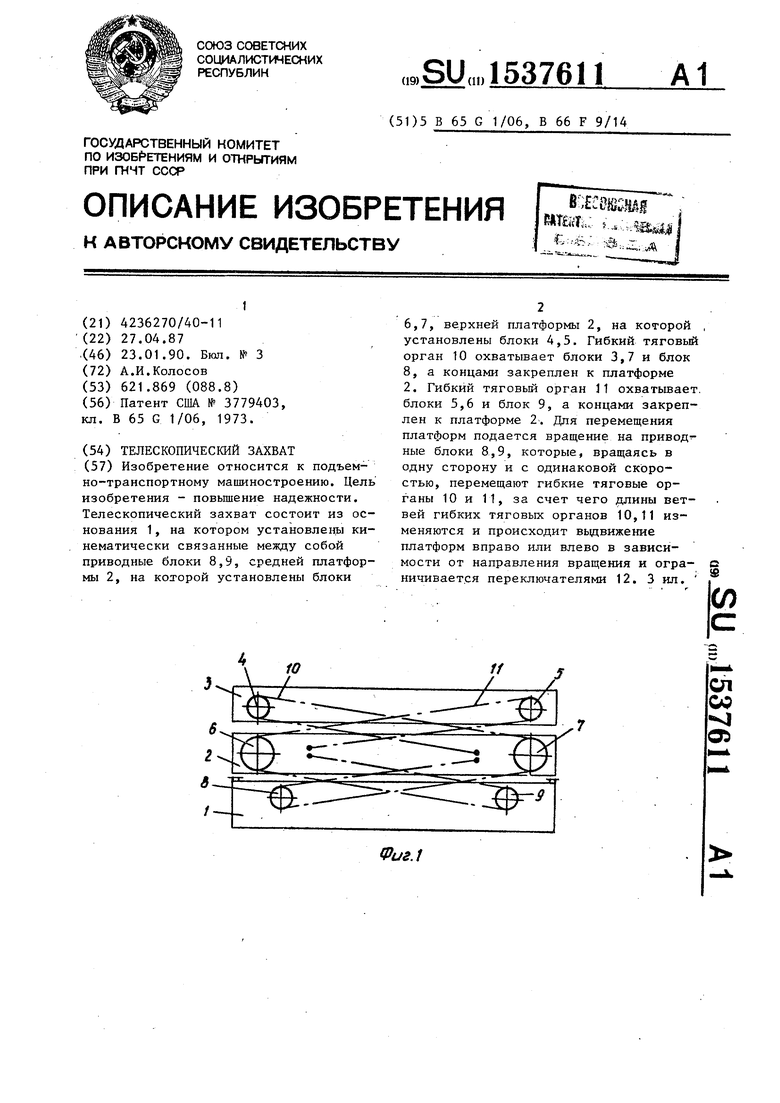
Фи.г
Фил.
| Патент США № 3779403, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
