Изобретение относится к литейному роизводству, в частности к устройтвам для изготовления литейных форм.
Цель изобретения - повышение каества поверхности литниковой чаши.
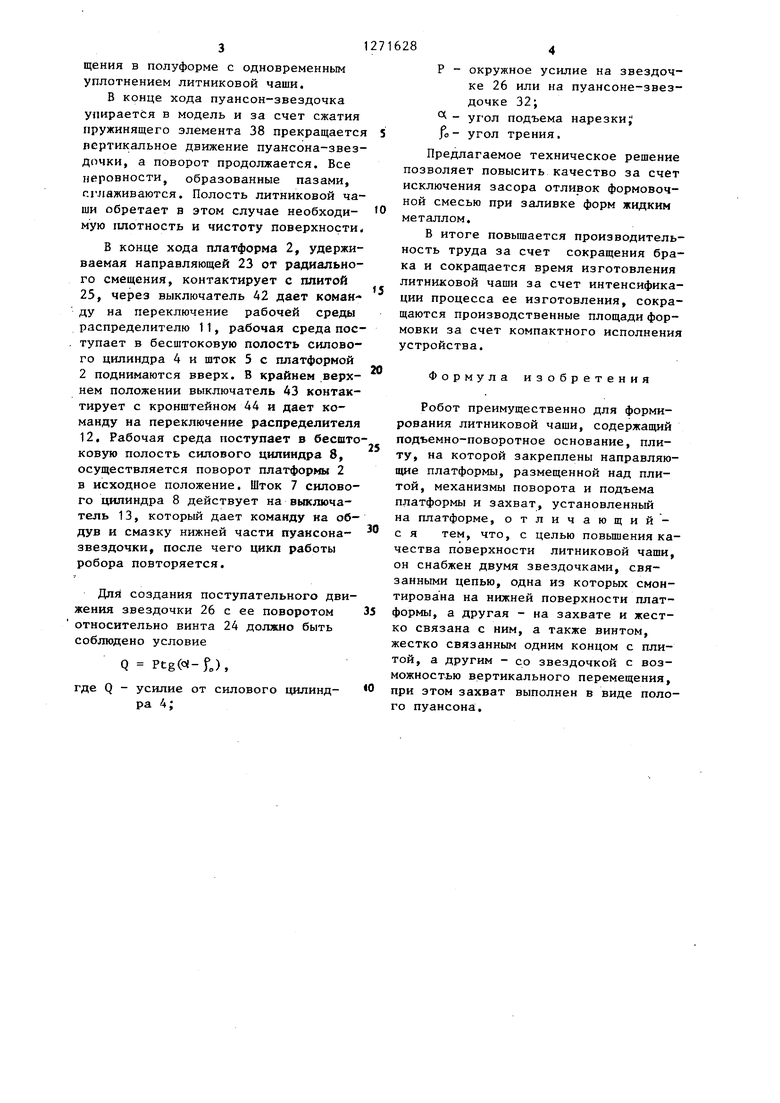
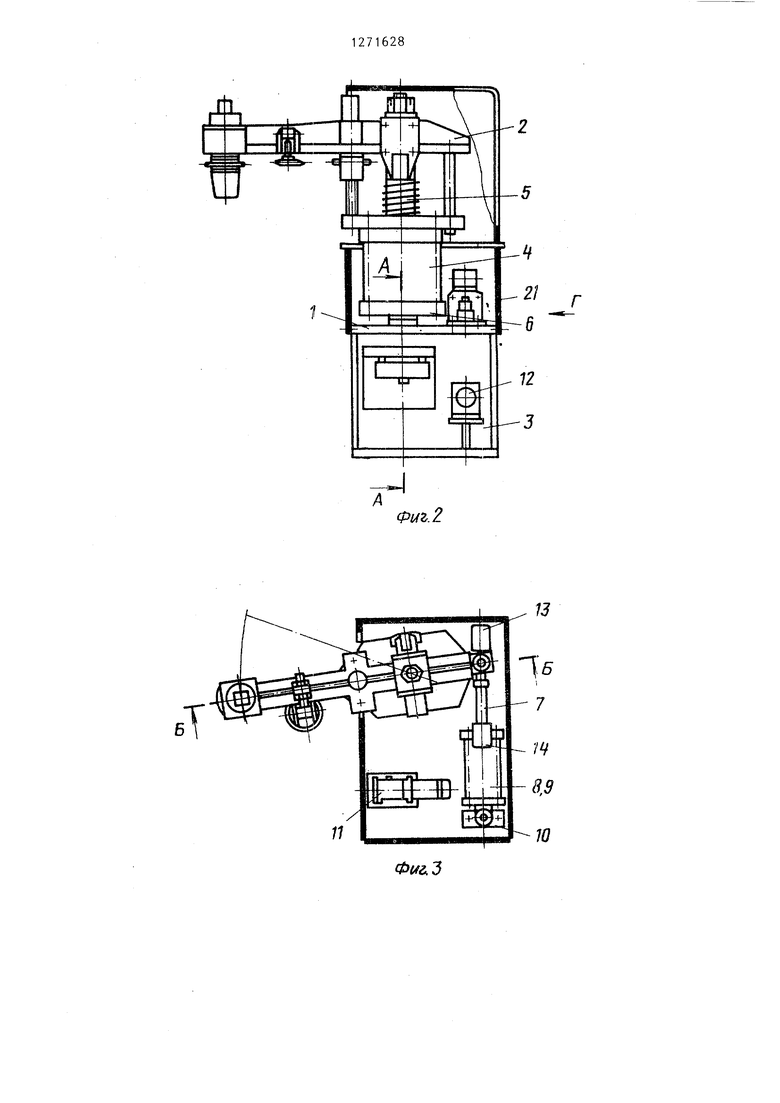
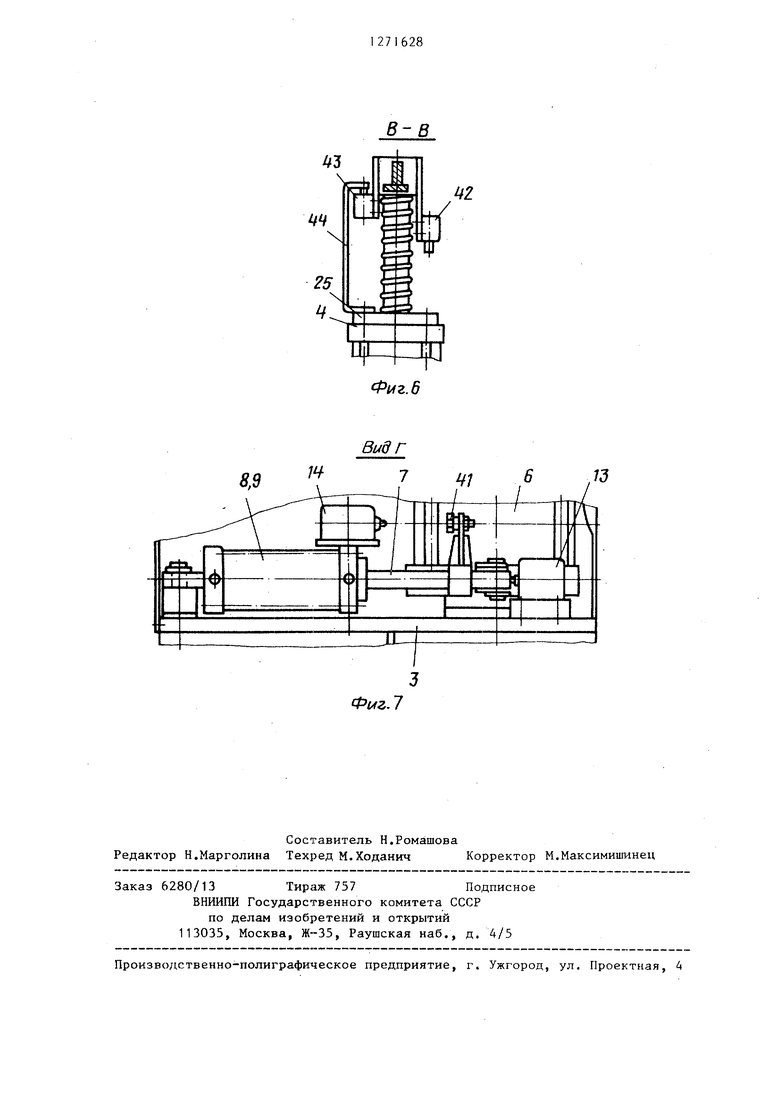
На фиг. 1 изображена кинематичесая схема роб.ота; на фиг. 2 - робот„ бщий вид спередиJ на фиг. 3 - то е, вид в плане; на фиг. 4 - разрез -А на фиг 2; на фиг. 5 - разрез Б-Б на фиг. 3, на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - вид Г на иг. 2.
Робот содержит подъемно-поворотное основание 1 с закрепленной на нем платформой 2.
Подъемно-поворотное основание состоит из корпуса 3 коробчатого сечения, силового цилиндра 4 со штоком 5, связанного с платформой 2,, а корпус 6 шарннрно соединен со штоком 7 силового цилиндра 8, корпус 9 которого шарнирно соединен с прикрепленной к корпусу 3 опорой 10, распределителей 11 и 12, связанных трубопроводами подачи рабочей среды с сетью и силовыми цилиндрами 4 и 8 выключателя 13 (фиг. 2 и 6), закрепленного на корпусе 3, и выключателя 14, закрепленного на корпусе 9 силового цилиндра 8, опорного узла 15 силового цилиндра 4, состоящего из втулок 16, полуколец 17, крьшки 18, прикрепленной болтами 19 к цапфе 20 корпуса 6 силового цилиндра 4, кожуха 21, закрепленного на верхней части корпуса 3, служащего для предохранения механизмов робота от пьпи и грязи.
На платформе 2, смонтированной на штоке 5 силового цилиндра 4, содержатся корпус 22, направляющая 23, закрепленная на корпусе 22, винт 24, закрепленный на плите 25, жестко связанной с силовым цилиндром 4, звездочка 26, сидящая на винте 24, которая удерживается от движения вниз скобой 27, прикрепленной к корпусу 22, съемный колпачок 28, предохраняющий винт 24 от загрязнения, натяжное устройство 29, состоящее из звездочки 30, углового рычага 31, один конец которого заканчивается посадочным местом для звездочки, другой конец имеет резьбовую нарезку и входит в отверстие корпуса 22, пуансонзвездочка 32, на нижней части которого имеются пазы для образования
внутренней поверхности чаши больших диаметров (или без пазов, если изготавливать чаши малых диаметров), в средней части пуансона-звездочки выполнены зубья, )зерхняя часть пуансона-звездочки имеет цилиндрическую поверхность с резьбовой нарезкой для его закрепления во втулке 33 корпуса 22, стопорная шайба 34, обеспечивающая свободный поворот пуансона звездочки и предохранение гайки 35 от свинчивания, механизм обдува и смазки 36, расположенный на корпусе 22, соединенный трубопроводом 37 с рас5 пределителем, пг)ужинящий элемент 38 опирается на среднюю часть пуансоназвездочки,
Пружина 39 удерживает платформу 2 при отсутствии рабочей среды в верх0 нем положении в целях безопасности Цепь 40 служит приводным органом для пуансона-звездочки 32 от звездочки 26. Натяжка цепи и съем осуществляются с помощью натяжного устройства 29.
5 На штоке 7 силового цилиндра 8 закреплен регулировочный винт 41. Выключатели 42 и 43 закреплены на платформе 2, Кронштейн 44, смонтированный на плите 25, служит упором для выклю0чателя 43.
При исходном положении робота платформа 2 находится в верхнем положении, рабочая среда из распределителя 11 поступает в нижнюю полость силового цилиндра 4, а из распределителя 12 - в бесштоковую полость силового lт,иJIИндpa 8.
Робот работает следующим образом.
При установке верхней полуфор0 мы на позицию формования дается команда распределителю 12, который перераспределяет рабочую среду в штоковую полость силового цилиндра 8, шток 7 которого вдвигается и в кон5 Де хода регулировочный винт 41 контактирует с выключателем 14, который дает команду на переключение рабочей среды распределителю 11. Рабочая среда поступает в штоковую по0 лость силового пилиндра 4 и шток 5 с платформой 2 опускается.
Пуансон-звездочка давит на уплотненную формовочную смесь.
Одновременно звездочка 26, двига55 ясь по нарезке винта 24, поворачивается и через цепь 40 поворачивает пуансон-звездочку 32 с пазами. Осуществляется образование полости вращения в полуформе с одновременным уплотнением литниковой чаши. В конце хода пуансон-звездочка упирается в модель и за счет сжатия пружинящего элемента 38 прекращаетс вертикальное движение пуансона-звез дочки, а поворот продолжается. Все неровности, образованные пазами, сглаживаются. Полость литниковой ча ши обретает в этом случае необходимую плотность и чистоту поверхности В конце хода платформа 2, удерживаемая направляющей 23 от радиального смещения, контактирует с плитой 25, через выключатель 42 дает команду на переключение рабочей среды распределителю 11, рабочая среда пос тупает в бесштоковую полость силового цилиндра 4 и шток 5 с платформой 2 поднимаются вверх, В крайнем верхнем положении выключатель 43 контактирует с кронштейном 44 и дает команду на переключение распределителя 12, Рабочая среда поступает в бесшто ковую полость силового цилиндра 8, осуществляется поворот платформы 2 в исходное положение, Шток 7 силового цилиндра 8 действует на выключатель 13, который дает команду на обдув и смазку нижней части пуансоназвездочки, после чего цикл работы робора повторяется. Для создания поступательного движения звездочки 26 с ее поворотом относительно винта 24 должно быть соблюдено условие Q Ptg(, где Q от силового цилиндусилиера 4; окружное усилие на звездочке 26 или на пуансоне-звездочке 32; угол подъема нарезки; fo - угол трения. Предлагаемое техническое решение позволяет повысить качество за счет исключения засора отливок формовочной смесью при заливке форм жидким металлом, В итоге повышается производительность труда за счет сокращения брака и сокращается время изготовления литниковой чаши за счет интенсификации процесса ее изготовления, сокращаются производственные площади формовки за счет компактного исполнения устройства. Формула изобретения Робот преимущественно для формирования литниковой чаши, содержащий подъемно-поворотное основание, плиту, на которой закреплены направляющие платформы, размещенной над плитой, механизмы поворота и подъема платформы и захват, установленный на платформе, отличающий с я тем, что, с целью повьшения качества поверхности литниковой чаши, он снабжен двумя звездочками, связанными цепью, одна из которых смонтирована на нижней поверхности платформы, а другая - на захвате и жестко связана с ним, а также винтом, жестко связанным одним концом с плитой, а другим - со звездочкой с возможностью вертикального перемещения, при этом захват выполнен в виде полого пуансона.
Г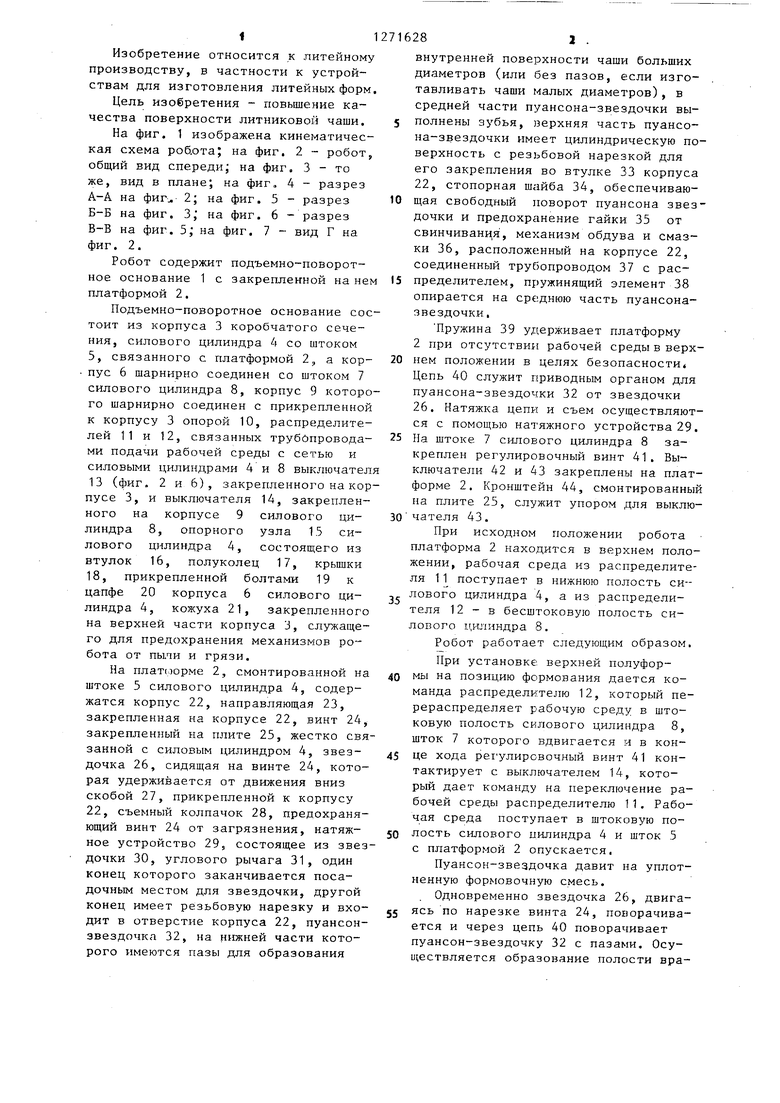
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1984 |
|
SU1301528A1 |
| Робот | 1988 |
|
SU1538994A1 |
| Пескометная формовочная машина | 1981 |
|
SU1007825A1 |
| Автоматический формовочный блок | 1982 |
|
SU1247152A1 |
| Кокильная карусельная машина для изготовления крупногабаритных отливок | 1987 |
|
SU1637947A1 |
| Установка для изготовления карбамидных стержней | 1985 |
|
SU1301557A1 |
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| Линия для штамповки деталей из листового материала | 1985 |
|
SU1282946A1 |
| УСТРОЙСТВО ПЛАСТИКАЦИИ И ИНЖЕКЦИИ ДЛЯ ЛИТЬЕВОГО ОБОРУДОВАНИЯ | 1992 |
|
RU2015019C1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
Изобретение относится к литейному производству, в частности к устройствам для изготовления литейных форм. Цель изобретения - повышение качества литниковой чаши. Робот преимущественно для формирования литниковой чаши содержит подъемно-поворотное основание 1, платформу 2, силовой цилиндр 4, шток которого связан с платформой 2 и установлен на основании 1, направляющие 23, звездочки 32 и 26, связанные цепью, винт 24, закрепленный на плите 25 одним концом, а другим - на звездочке 26. Звездочка 32 выполнена за одно целое с полым пуансоном и имеет сквозное отверстие, сообщенное с системой с обдува и смазки 36. 7 ил. «е (Л 7J ю о 00
-J. f
АХ/ХУУ
.
Б- Б
.б
//3
8,S
в-в
Фиг. 6
Вид Г
Фиг.7
| Дистанционный указатель уровня воды поплавкового типа для паровых котлов | 1949 |
|
SU83224A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Манипулятор | 1975 |
|
SU608635A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
