Изобретение относится к перегрузочным устройствам, используемым для автоматического съема изделий типа плоских бортов и рам с подвесного конвейера.
Целью изобретения является повышение надежности работы устройства.
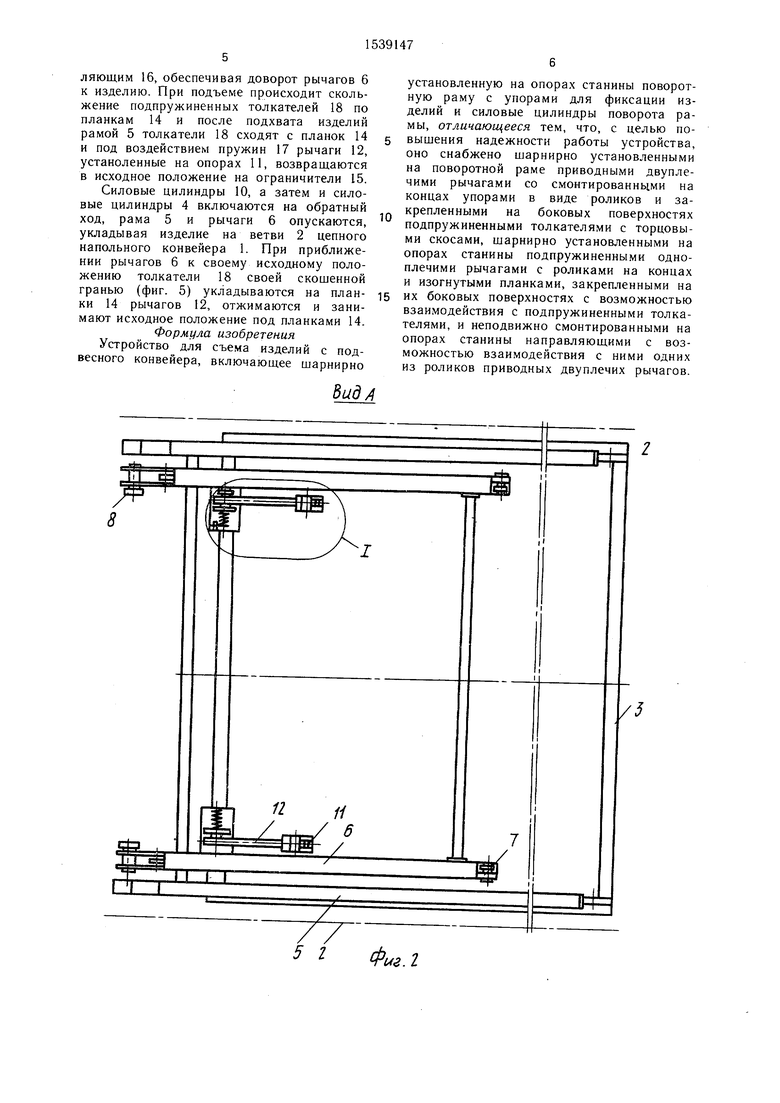
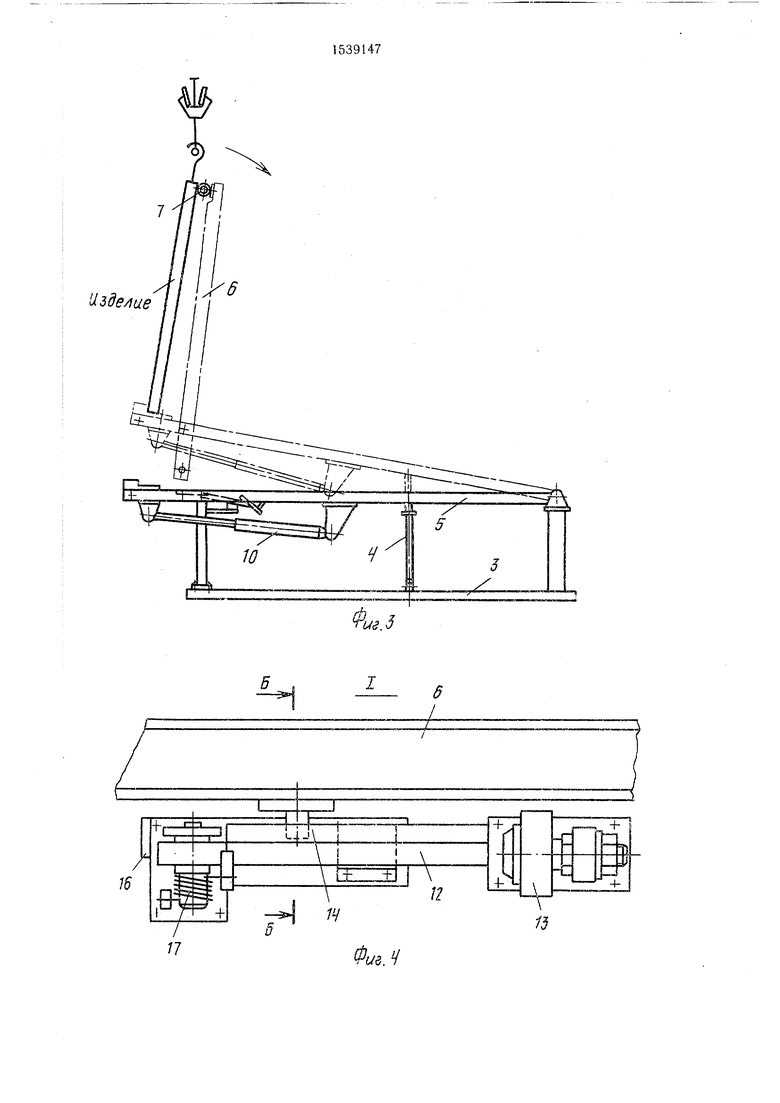
На фиг. 1 схематично изображено предлагаемое устройство; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - устройство в момент съема изделия с конвейера; на фиг. 4 - узел I на фиг. 2; на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - разрез В-В на фиг. 5.
Устройство для съема изделий с подвесного конвейера содержит цепной напольный конвейер 1 (фиг. 1), между ветвями 2 которого расположена неподвижная станина 3 (фиг. 2) с шарнирно установленной на ней с возможностью поворота в вертикальной плоскости от силовых цилиндров 4 рама 5 (фиг. 1).
В раме 5 шарнирно установлены соединенные связью приводные двуплечие рычаги 6, имеющие на концах ролики 7 для поддержки изделия в процессе подхвата и кантования (фиг. 1 и 2), а на других концах - ролики 8 и кронштейны 9, к которым шарнирно подсоединены штоки силовых цилиндров 10, опирающихся на кронштейны, расположенные на поворотной раме 5 (фиг. 3).
Между приводными двуплечими рычагами 6 имеются опоры 11, установленные на неподвижной станине 3 (фиг. 1 и 2), на которых шарнирно крепятся одноплечие рычаги 12 (фиг. 4 и 5), имеющие на своих концах ролики 13 (фиг. 4 и 6), а на боковых поверхностях, обращенных к приводным двуплечим рычагам 6, изогнутые планки 14 (фиг. 5 и 6). На опорах 11 имеются ограничители 15 для удержания одноплечих рычагов 12 в исходном положении (фиг. 6) и направляющие 16, по которым движутся ролики 8 ры- чагов 6 при подхвате изделия. Одноплечие рычаги 12 имеют соосно установленные пружины 17, служащие для возврата рычагов 12 в исходное положение (фиг. 4 и 6).
На боковых поверхностях приводных двуплечих рычагов 6 для взаимодействия с планками 14 крепятся подпружиненные толкатели 18 с торцовыми скосами (фиг. 5). На поворотной раме 5 монтируются упоры 19 0 для фиксации изделий.
Устройство работает следующим образом.
Работа устройства происходит в автоматическом режиме по командам конечных
5
выключателей, не показанных на чертежах.
0
Исходное положение устройства - рама 5 находится в нижнем положении и ниже уровня ветвей 2 (фиг. 1) цепного напольного конвейера 1. В таком же уровне находятся поворотные рычаги 6 и одно0 плечие рычаги 12, а подпружиненные толкатели 18 находятся под планками 14 (фиг. 5 и 6).
Изделие, подвешенное технологическими крюками на траверсу подвесного грузоне- сущего конвейера, выходя при своем дви5 жении на позицию съема, обеспечивает через систему управления (не показано) подачу команды на работу устройства. Срабатывают силовые цилиндры 10, которые через кронштейны 9 поворачивают рычаги 6, приближая их роликами 7 к изделию в верхней его части (фиг. 1). При этом движении подпружиненные толкатели 18, находясь во взаимодействии с планками 14, поворачивают одноплечие рычаги 12 (фиг. 4- 6), которые при своем движении к изделию
5 опережают рычаги 6 (фиг. 1) и, войдя с ним своими роликами 13 в контакт, отклоняют низ изделия, не препятствуя его движению вместе с грузонесущим конвейером. Ролики 8 рычагов 6 ложатся на направляющие 16, служащие ограни0 чителями поворота рычагов 6 (фиг. 1). Затем следует срабатывание силовых цилиндров 4, которые поворачивают раму 5 относительно станины 3. Рама 5 подхватывает упорами изделие (фиг. 3), продолжая подниматься, снимает его с травер5 сы, при этом изделие постоянно опирается, кроме рамы 5, на роЛики 7 рычагов 6, так как при подъеме рамы 5 ролики 8 рычагов 6 следуют по направляющим 16, обеспечивая доворот рычагов 6 к изделию. При подъеме происходит скольжение подпружиненных толкателей 18 по планкам 14 и после подхвата изделий рамой 5 толкатели 18 сходят с планок 14 и под воздействием пружин 17 рычаги 12, устаноленные на опорах 11, возвращаются в исходное положение на ограничители 15.
Силовые цилиндры 10, а затем и вые цилиндры 4 включаются на обратный ход, рама 5 и рычаги 6 опускаются, укладывая изделие на ветви 2 цепного напольного конвейера 1. При приближении рычагов 6 к своему исходному положению толкатели 18 своей скошенной гранью (фиг. 5) укладываются на планки 14 рычагов 12, отжимаются и занимают исходное положение под планками 14. Формула изобретения
Устройство для съема изделий с подвесного конвейера, включающее шарнирно
установленную на опорах станины поворотную раму с упорами для фиксации изделий и силовые цилиндры поворота рамы, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено шарнирно установленными на поворотной раме приводными двуплечими рычагами со смонтированными на концах упорами в виде роликов и закрепленными на боковых поверхностях
подпружиненными толкателями с торцовыми скосами, шарнирно установленными на опорах станины подпружиненными одноплечими рычагами с роликами на концах и изогнутыми планками, закрепленными на
5 их боковых поверхностях с возможностью взаимодействия с подпружиненными толкателями, и неподвижно смонтированными на опорах станины направляющими с возможностью взаимодействия с ними одних из роликов приводных двуплечих рычагов.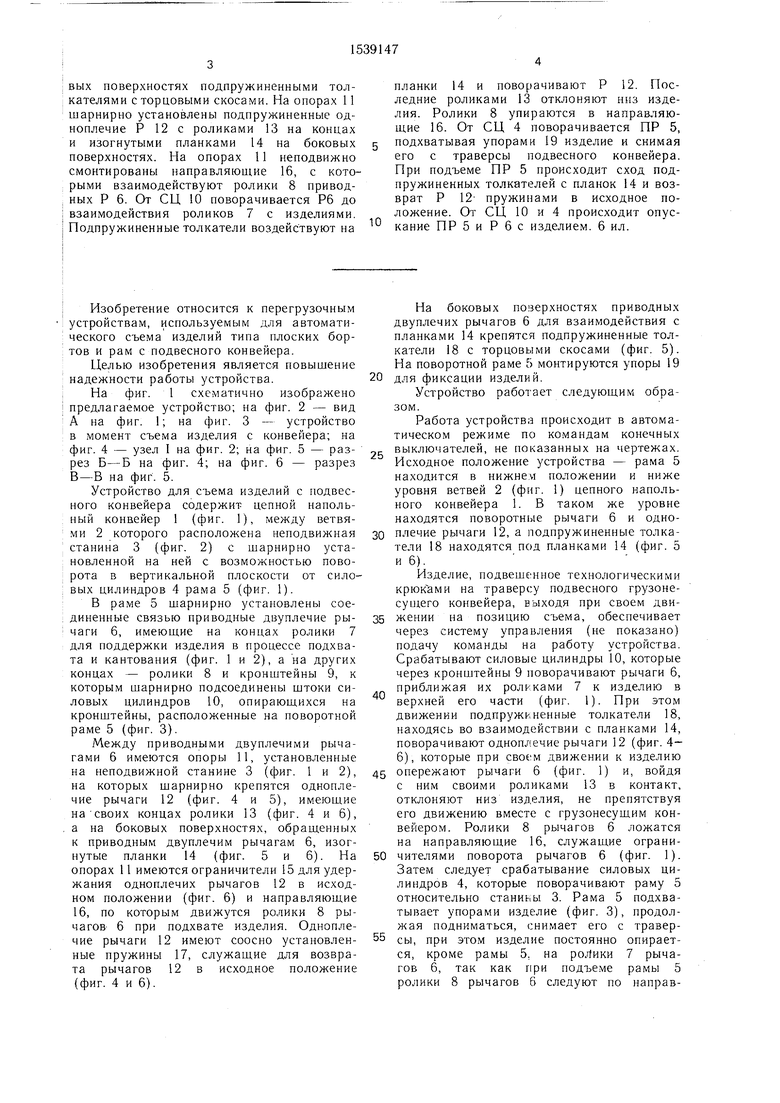
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки подвесного конвейера | 1986 |
|
SU1323482A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для передачи изделий с одного конвейера на другой | 1988 |
|
SU1518248A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Устройство для намотки ленты на катушку на текстильных машинах | 1966 |
|
SU268949A1 |
| Сборочный конвейер | 1972 |
|
SU477907A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Автомат для перемотки пряжи и ниток в мотки | 1957 |
|
SU115224A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
Изобретение относится к перегрузочным устройствам и позволяет повысить надежность работы устройства. На опорах 11 станины шарнирно установлена поворотная рама /ПР/ 5 с упорами 19 для фиксации изделий и силовыми цилиндрами /СЦ/ 4 поворота ПР 5. На последней шарнирно установлены приводные от СЦ 10 двуплечие рычаги /Р/ 6 со смонтированными на концах упорами в виде роликов 7, 8 и закрепленными на боковых поверхностях подпружиненными толкателями с торцовыми скосами. На опорах 11 шарнирно установлены подпружиненные одноплечие Р 12 с роликами 13 на концах и изогнутыми планками 14 на боковых поверхностях. На опорах 11 неподвижно смонтированы направляющие 16, с которыми взаимодействуют ролики 8 приводных Р 6. От СЦ 10 поворачивается Р 6 до взаимодействия роликов 7 с изделиями. Подпружиненные толкатели воздействуют на планки 14 и поворачивают Р 12. Последние роликами 13 отклоняют низ изделия. Ролики 8 упираются в направляющие 16. От СЦ 4 поворачивается ПР 5, подхватывая упорами 19 изделие и снимая его с траверсы подвесного конвейера. При подъеме ПР 5 происходит сход подпружиненных толкателей с планок 14 и возврат Р 12 пружинами в исходное положение. От СЦ 10 и 4 происходит опускание ПР 5 и Р 6 с изделием. 6 ил.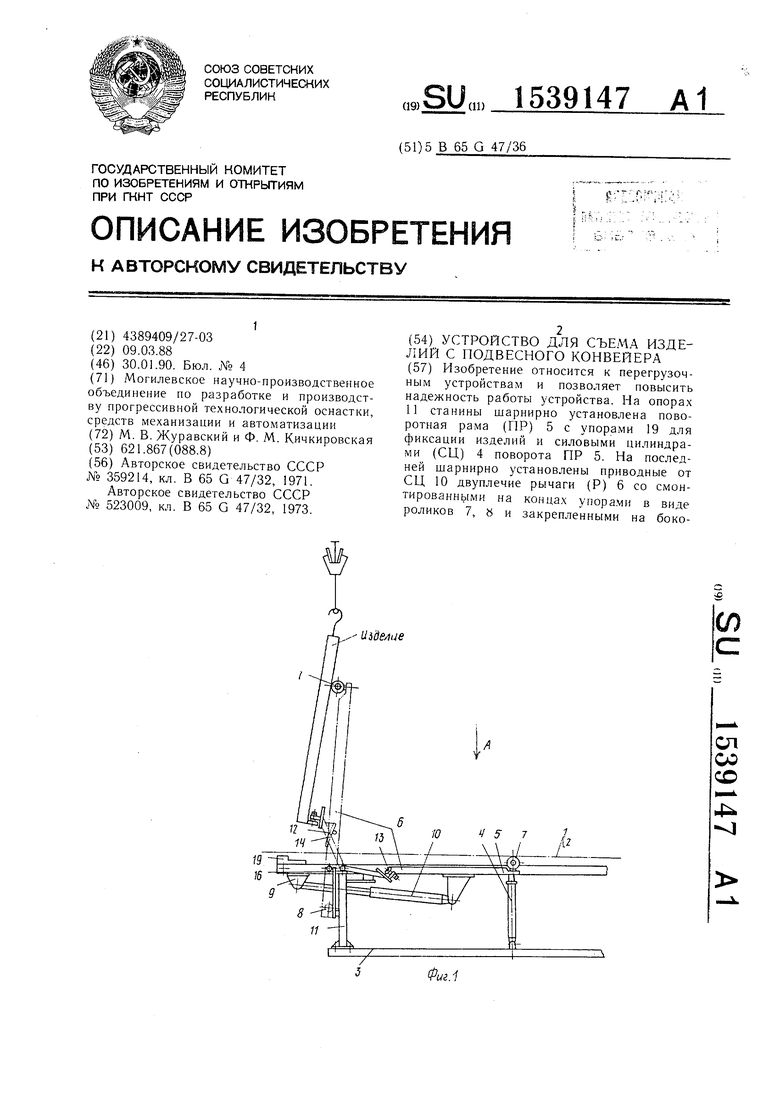
ЬадА
5 I Фиг. 2
Usde/iue
iet.J
Фив. У
s Ј-Ј «i
Повернуто -H
U
Фив. 5
Фиг.6
| 0 |
|
SU359214A1 |
