Изобретение относится к металлообработке и может быть использовано при сборке запрессовкой охватывающей и охватываемой деталей.
Цель изобретения - расширение технологических возможностей.
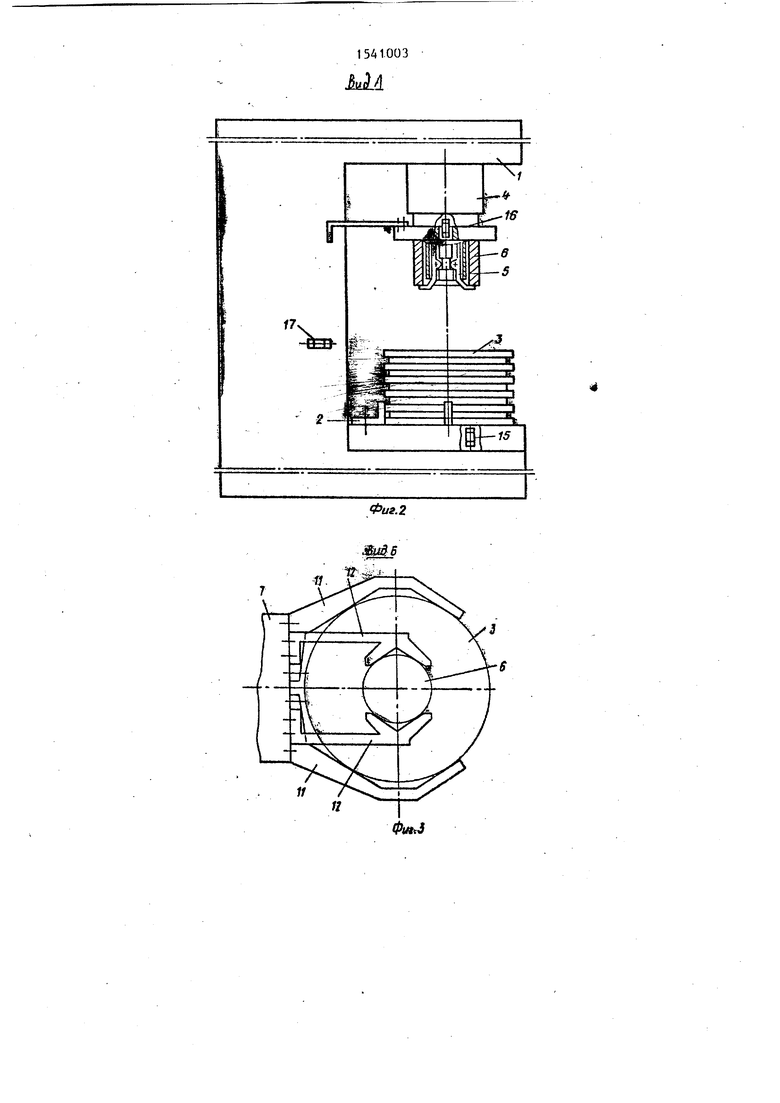
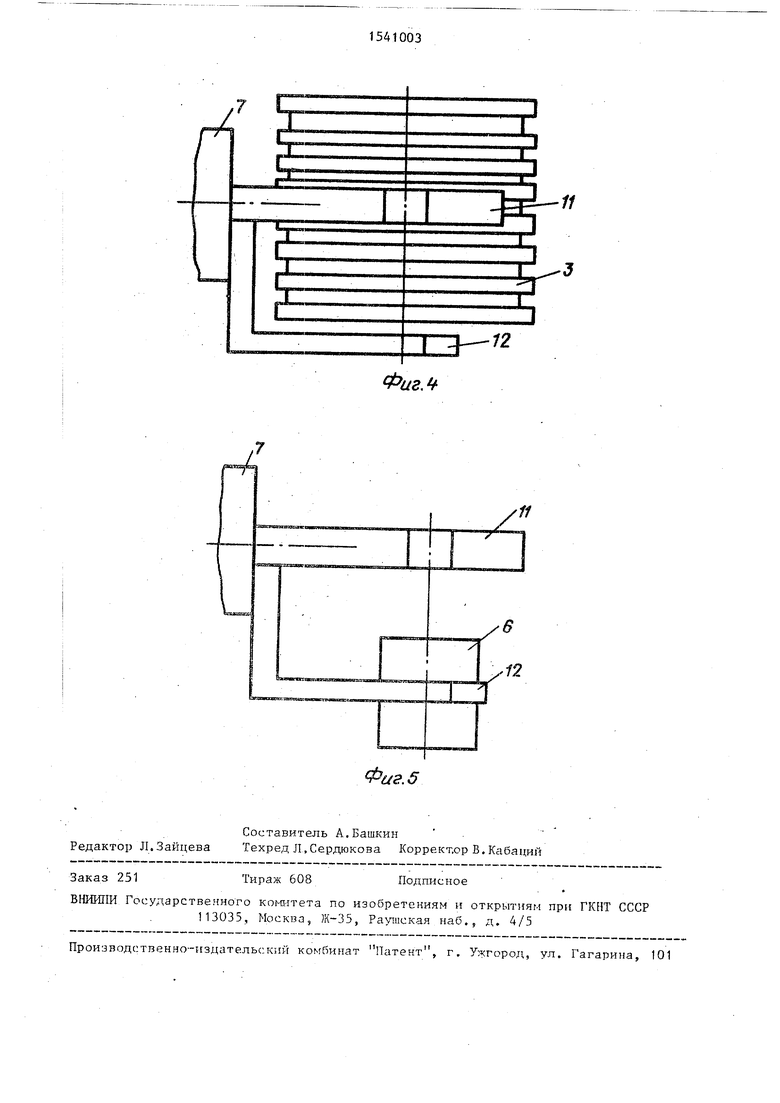
На фиг. 1 представлено устройство для сборки, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - расположение в схвате робота охватывающей детали (шкива); на фиг. 5 - расположение в схвате робота охватываемой детали (втулки).
Технологический комплекс сборки состоит из пресса 1, на столе которого установлены упоры 2 для фиксации шкива 3, а на пуансоне 4 закреплен захват 5 для зажима втулок 6, промышленного робота 7, питателя 8 шкивов, питателя 9 втулок и накопителя 10. На руке робота 7 закреплен схват с двумя парами губок, где губки 11 предназначены для захвата шкива 3, а губки 12 - для захвата втулки 6. Работой комплекса управляет узел в виде датчиков наличия заготовки на питателе шкивов 13, наличия заготовки на питателе втулки 14, наличия шкива на столе пресса 15, наличия заготовки в захвате на пуансоне 16, срабатывания пресса 17.
Устройство работает следующим образом.
При наличии сигнала от датчика 14 робот 7 забирает заготовку с питателя 9 втулок. Захват втулки 6- при это происходит губками 12. Робот,поворачивается к прессу 1, подает загото
ку в захват 5. При зажиме втулки 6 в захвате 5 срабатывает датчик 16. Затем при наличии сигнала с датчика 13 происходит захват роботом 7 заготовки из питателя 8 шкивов . Захват шкива 3 при этом производится губками 11. Робот снова поворачивается к
0
5
5 0
0
5
прессу 1 и устанавливает шкив 3 в упоры 2, о чем сигнализирует датчик 15. Пуансон 4 пресса с захватом 5 и втулкой 6 опускается, происходит запрессовка втулки 6 в шкив 3. Срабатывает датчик 17, захват 5 разжимается, пуансон 4 идет вверх, собранное изделие снимается роботом 7 со стола пресса 1 и устанавливается в накопитель 10.
Применение предлагаемого устройства позволяет расширить технологически возможности за счет сборки запрессовкой, так как автоматически промышленным роботом на прессе устанавливаются два типоразмера заготовок с фиксацией одного типоразмера на столе пресса, а второго - на пуансоне. Конструкция схвата робота, позволяющая захватывать заготовки двух типоразмеров, также расширяет функциональные возможности самого робота и, кроме того, позволяет полностью исключить ручной труд при работе с заготовками большой массы и размеров.
Формула изобретения
Устройство для автоматической загрузки и выгрузки пресса, содержащее механизм загрузки деталей на пресс и выгрузки изделий, а также узел управления, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения сборки охватывающей и охватываемой деталей, оно снабжено смонтированным на пуансоне пресса захватом для охватываемой детали, при этом механизм загрузки деталей на пресс и выгрузки изделий выполнен в виде промышленного робота со смонтированным на его руке схватом с двумя парами губок под охватывающую и охватываемую детали.
1541003
U/l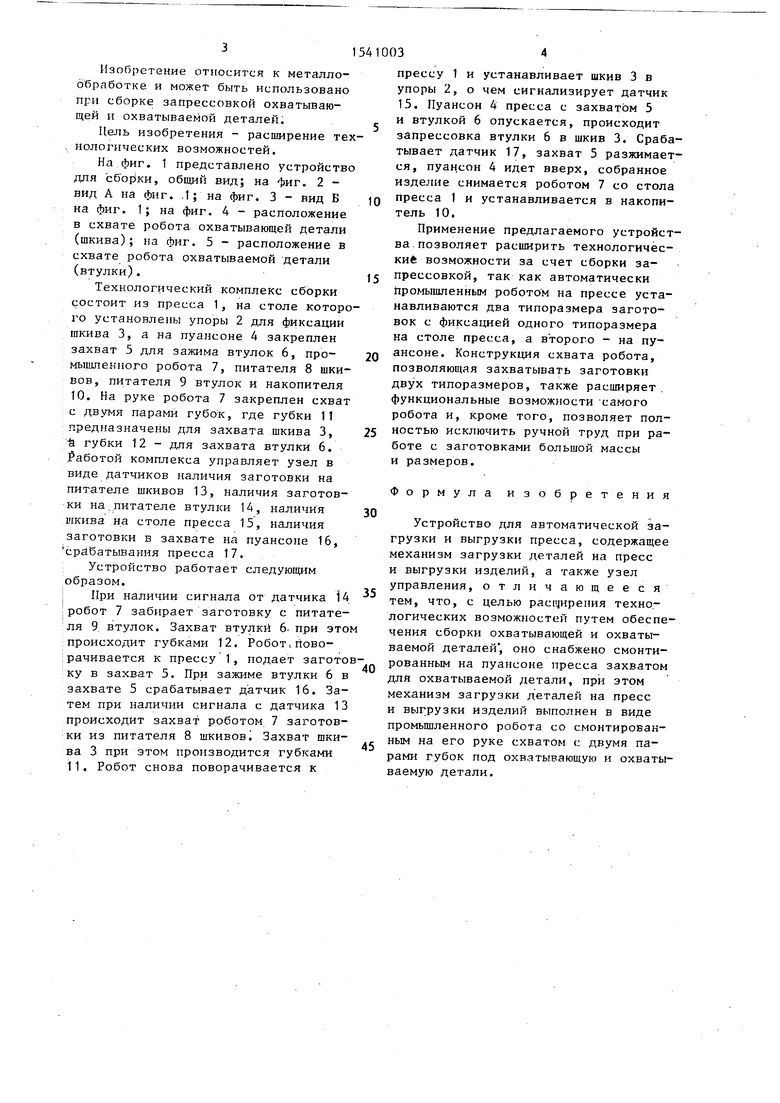
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для сборки узлов типа "вал-втулка | 1978 |
|
SU766814A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Автомат для сборки деталей запрессовкой | 1981 |
|
SU1092031A1 |
| Робототехнический комплекс | 1981 |
|
SU1034892A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
Изобретение относится к металлообработке и может быть использовано для сборки запрессовкой двух деталей. Цель изобретения - расширение технологических возможностей. Робот 7 подает одну из двух собираемых деталей с питателя 9 в захват, закрепленный на пуансоне пресса 1. Затем робот 7 забирает с другого питателя 8 вторую деталь и устанавливает ее на стол пресса 1. Пуансон пресса с захватом и первой деталью перемещается вниз, происходит запрессовка деталей. Собранные детали роботом 7 устанавливаются в накопитель 10. Схват робота имеет две пары губок, причем каждая пара губок выполнена с возможностью зажима своего типоразмера детали. 5 ил.
2
11
П
/5
Составитель А.Башкин Редактор Л.Зайцева Техред Л,Сердюкова Коррект.ор В. Кабаций
Заказ 251
Тираж 608
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
/1i
Фиг. 5
Подписное
| Устройство для автоматической загрузки и выгрузки пресса | 1977 |
|
SU663466A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
